

ilyen a robot már létrejött, és DIY: LightBot néven hívják. Sőt, bárki gyűjtheti azt, az összes alkotóelem könnyen megtalálható, és a robotot egyszerűen összeszerelni fogják. Az ilyen típusú robot a tulajdonos után sötétben állandóan elindul, és a megfelelő helyen kiemeli, ami elkerüli a zseblámpa kézben tartásának szükségességét. A robotot a tulajdonos felügyeli egy infravörös érzékelőnek köszönhetően, amelyet a tulajdonos lába rögzít.
Anyagok és eszközök robot létrehozásához:
1. Infravörös jelzőfény. Egy ilyen eszköz négy infravörös LED-ből áll, amelyek megtalálhatók a TV távirányítójában.
2. Két kerék a K'nex készletből vagy gyermekjátékokból.
3. Két kis motor (megtalálható a gyermekjátékokban).
4. Két infravörös tranzisztor, például NPN vagy fotorezisztor. Az infravörös fototranzisztorokat nem nehéz megvásárolni.
5. Három AA elem és egy 9 voltos.
6. PVC cső.
7. Forró olvadékragasztó.
8. Eldobható műanyag villa.
A robot gyártási folyamata:
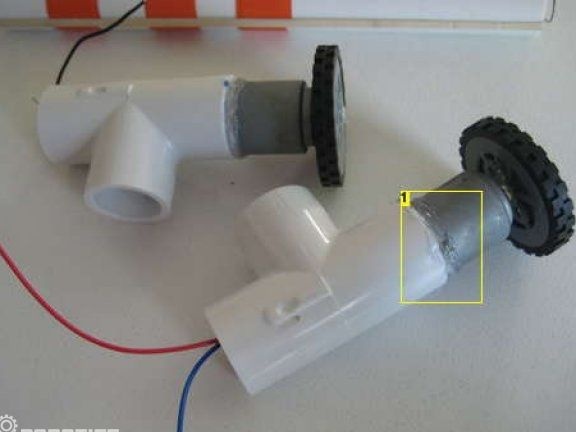
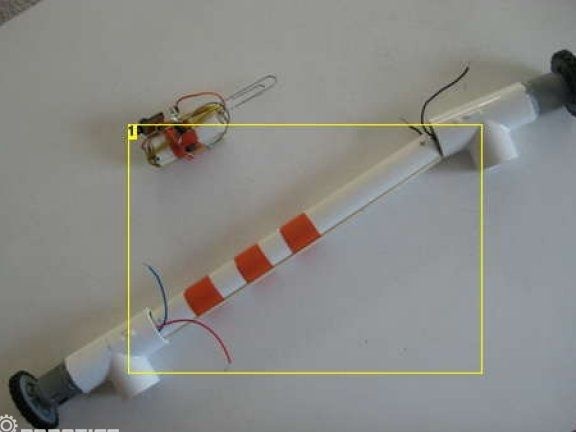
Első lépés. Motor beszerelése
Először telepítenie kell a motorokat. Telepítésükre műanyag „pólókat” használnak, amelyeket azután a főcsőre helyeznek. A motorokat meleg olvadékragasztóval rögzítik. A ragasztót itt nem kell megbánni. Ebben a szakaszban a kerekek is felhelyezhetők a motorok tengelyére. Annak érdekében, hogy szilárdan megtartsák, melegen olvadt ragasztóval is rögzíthetők.
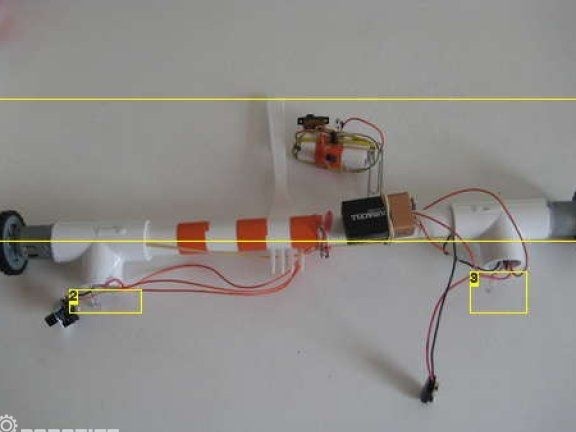
Második lépés Fotómérők telepítése
Fénymérőkre van szükség az infravörös jelzőfény nyomon követéséhez. Egyfajta robotszem lesz. A fény kijutásának irányától függően a robot felgyorsítja az egyik motort, hogy a megfelelő irányba forduljon.
A "ellenállásokhoz" a 2 és 3 számú helyekre fényvisszaállók vannak rögzítve. Ezekben a pozíciókban háromragasztóval rögzíthetők.
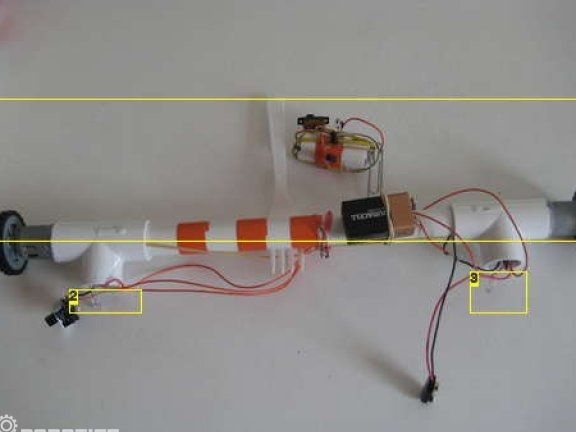
Harmadik lépés Tápegység telepítése
Összességében a robot két áramforráson működik. Ez három AA elem és egy 9 voltos elem. Ami az ujj elemeket illeti, azokat a cső belsejébe kell felszerelni.Nos, egy „Krona” típusú akkumulátort kívülről csatlakoztatunk a kézibeszélőhöz.
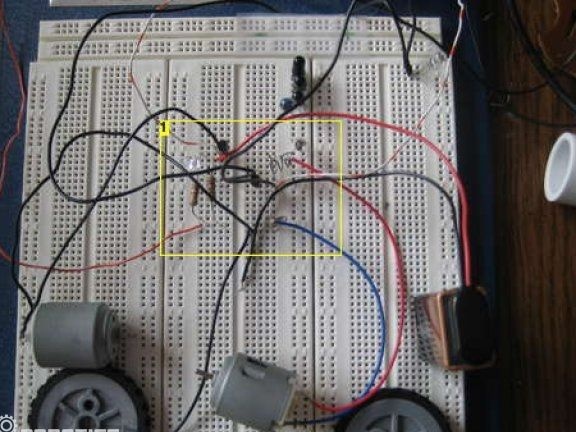
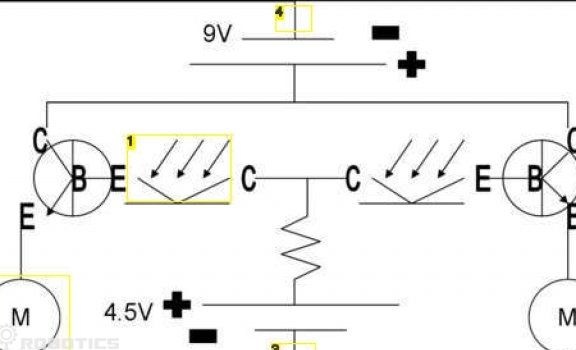
Negyedik lépés Robot áramkör
A sémát úgy alakították ki, hogy ha a robot az egyik oldalán sugárzást lát, akkor az ellenkező oldalról gyorsítja a motort, tehát a robot megfordul. A kívánt motorfordulatszámot az ellenállások kísérleti cseréjével érjük el.
Egy másik áramkört ki lehet egészíteni kapcsolóval. Úgy kell felszerelni, hogy megszakítsa a robot tápellátását.
Az ábrán az 1 szám egy fototranzisztort jelöl, 2 - motorvezérlőt, 3 - egy kapcsoló beépítésének helyét, 4 - itt is elhelyezhet egy kapcsolót.
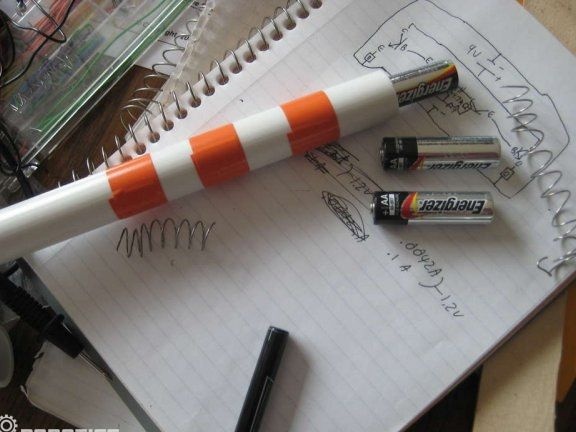
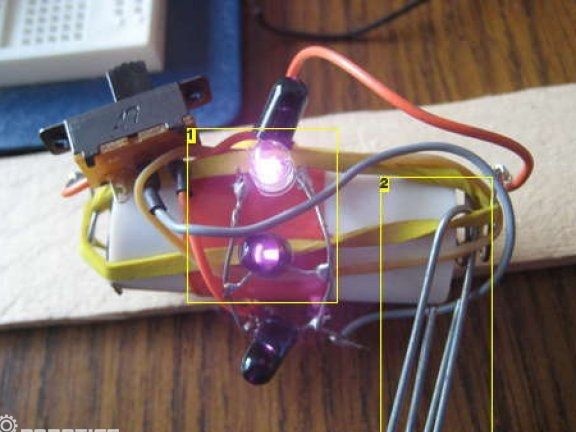
Ötödik lépés Hozzon létre egy IR jelet
Infravörös jelzőfény létrehozásához egy rövid polivinil-klorid csövet veszünk, amelybe egy AA elem van behelyezve. Az érintkezőket rugalmas szalagnak köszönhetően tartják, és a négy infravörös dióda tápellátását egy kapcsoló vezérli. Lehetetlen ilyen fényt látni a szemmel, hogy a diódák működőképességének ellenőrzése érdekében azokat digitális fényképezőgép segítségével kell megnézni. A jeladó szokásos gemkapcsot a lábához rögzítik.
Hatodik lépés A robot összeszerelésének utolsó szakasza
Most mindent össze kell kapcsolni az ábrán látható módon. A mechanikus részt is össze kell szerelni, a legnagyobb figyelmet kell fordítani a fényérzékelőkre, ki kell őket ragasztani, mert különben nem képesek felvenni a jeladó jelét. Most, amikor bekapcsolja a robotot, sétálnia kell rajta, és megnéznie, mit fog tenni.
Lehet, hogy a robot először nem megy a tulajdonos után, de ne ess kétségbe, mert az áramkört meg lehet változtatni, és a robot szükség szerint konfigurálható. A szerző szerint a jövőben szoftver telepíthető a robotra, amelynek köszönhetően felismeri a tárgyakat és az embereket. Számos különféle érzékelőt telepíthet, és ezt a robotot csúcstechnikai eszközré teheti.