

A robot A DIY nagyszerű játék lesz a gyermekek számára, és ezzel rokonokat vagy barátokat is játszhat. A robot lényege a következő. Ez egy kapcsolóval ellátott doboz. Amint valaki rákattint egy kapcsolóra a dobozban, kinyílik egy ajtó, ahonnan egy kéz kinyílik, és visszaállítja a kapcsolót eredeti állapotába. A robot külső egyszerűsége ellenére valójában mindez elég viccesnek tűnik.
A robot létrehozásának alapja egy áramkör Arduino. Vannak olyan mechanikai elemek is, amelyeket az alábbiakban tárgyalunk. Nézzük meg részletesebben, hogyan lehet csináld magad szerelj fel egy ilyen robotot.
Anyagok és eszközök a gyártáshoz:
- Arduino tábla, bármilyen, PWM kimenetekkel, megteszi;
- szervomotorok, két darabból (megfelelő a modell Futaba - S3003, egy ilyen motor teljesítménye elegendő az ajtó kinyitásához, az eszköz akár 3,2 kg / cm teljesítményt is képes termelni);
- elemek;
- SPST vagy SPTT típusú kapcsoló;
- kapcsoló az akkumulátor teljesítményének vezérlésére;
- szüksége van egy gombra az Arduino újraindításához;
- huzalok, jumperok és egyéb apró dolgok.

Ezenkívül szükség van egy sebességváltóra (rádióvezérelt autókhoz), egy Arduino motorvédő pajzsnak nevezett elektromos motorlapjára, egy RC szervomotorra. Ezekre az összetevőkre van szükség ahhoz, hogy a doboz mozogjon, mint a szerző.
A zajszint csökkentése érdekében az eszköz működése során 10 mF névleges értékű elektrolit típusú kondenzátorra, 10K ellenállásra és 74HC04 inverterre van szükség.
A robot gyártási folyamata:
Első lépés. Hogyan készítsünk egy dobozt
Egy doboz, vagyis egy robottest létrehozásához meg kell találni a rétegelt lemezt vagy parafa-t. Ezen felül erős ragasztóra van szüksége a fa ragasztásához. Fontos megérteni, hogy minél többet vesz fel a szerkezet, annál több energiát fog felhasználni. A doboz mérete 22cm x 14cm x 14cm.

Második lépés Vázlatos ábra elektronikus alkatrészek
A robot tetején található Arduino alaplap, két szervó és egy kapcsoló. Ami a zajért felelős áramkört illeti, ez helyettesíthető egy szokásos ellenállással.
A szervóhajtásokat az Arduino tábla ötödik csapján hajtják meg. Ami a jelvezetékeket illeti, a 9 és 10 érintkezőkhöz vannak csatlakoztatva. Ezeknek a PWM érintkezőknek köszönhetően a szervomotorok forgásszöge szabályozott. Ez egy 0 és 180 fok közötti szög.
A piros gombra van szükség az Arduino újraindításához.
Az áramkör alján található az Arduino motor pajzslapja.A táblán két csatornát láthat, A és B, köszönhetően nekik, ha szükséges, két motort csatlakoztathat egyszerre. A tábla fő feladata az, hogy vele programozottan beállíthatja a forgási sebességet, az irányt, a szünetet a motorok bármelyik csatornájához. Ha megnézi az ábrát, akkor a B csatornát használja, míg a 13 érintkező határozza meg az irányt, a 11 érintkező a sebességet, a 8 érintkező pedig a fékek vezérlésére szolgál.
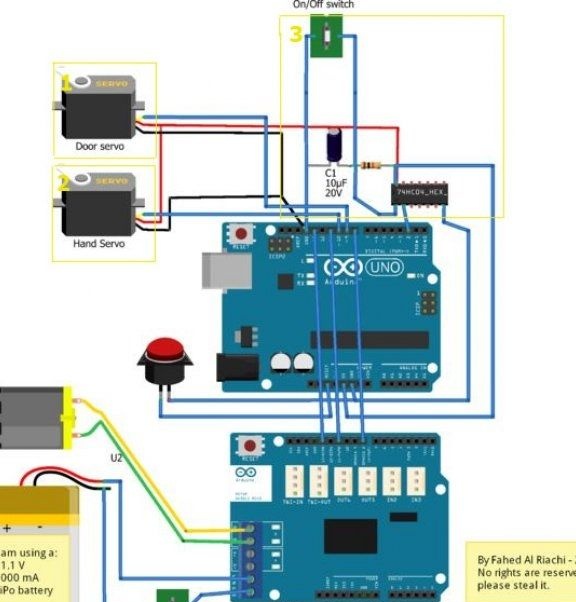
Az áramforrás 11,1 / 1000 mA-os akkumulátor, az Arduino motor pajzslapjához csatlakozik. Ha nem használják, akkor az akkumulátort közvetlenül csatlakoztatják az alaplaphoz.
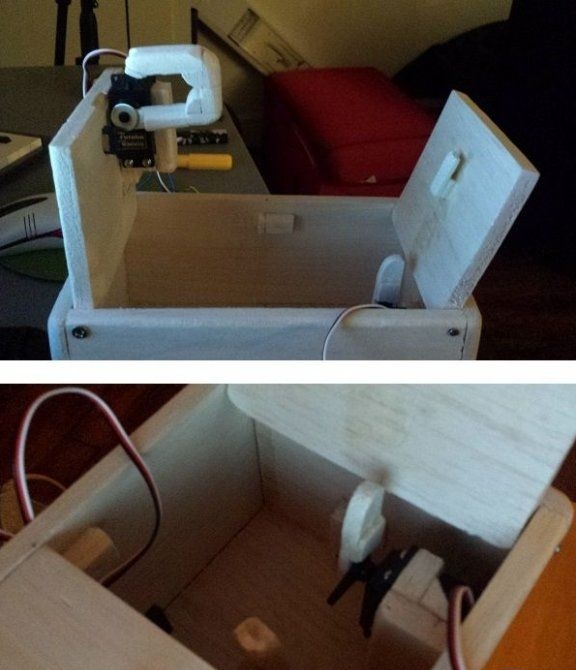
Harmadik lépés Motor beszerelése
A szervóhajtást és a kezeket kísérletileg telepítik, a gyakorlatban ellenőrizni kell, hogy a mechanika megfelelően működik-e. A motorok eltérési sugarainak ellenőrzéséhez használja az Arduino IDE programot.
Bármilyen kézi fa gyártásához. A lényeg az, hogy könnyű, különben az energiafogyasztás növekszik. A kéz méretét a telepítés során beállítják, a kívánt hosszúság kiválasztásával elérik a kívánt hatást.
A fedél tolóját és a kezét úgy vannak felszerelve, hogy működés közben ne érjenek a szervomotorhoz.
Negyedik lépés Csatlakozunk a szervomotorhoz és kapcsoljuk Arduino-hoz
Vezetékek és áthidaló elemek használatával az összes elektronikus elemet a megadott séma szerint össze kell kötni egymással. A vezetékeket úgy kell lefektetni, hogy ne zavarják a robot mozgó elemeit.
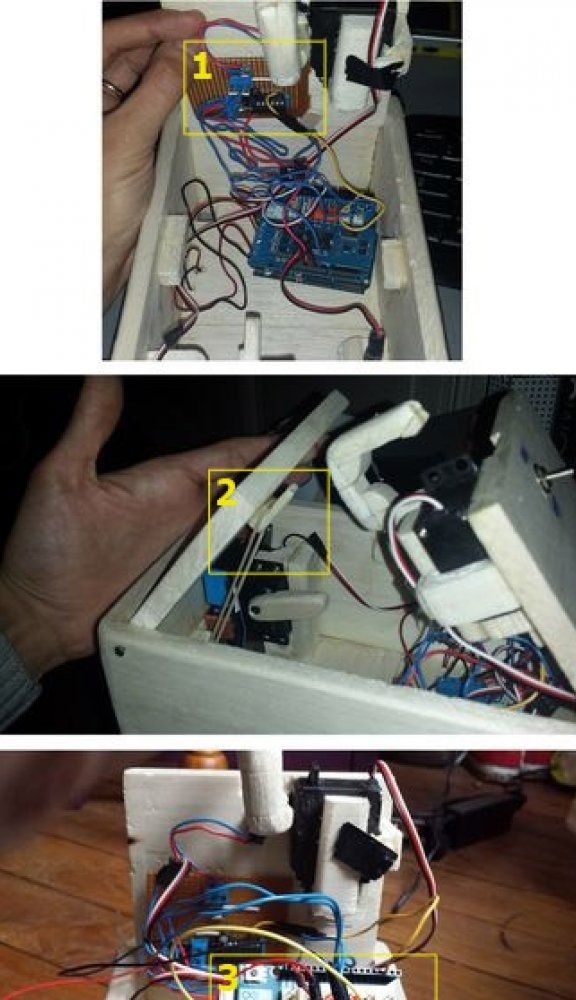
Az 1-es szám alatt láthatja, hogyan van csatlakoztatva, és hol található a kapcsolási áramkör. A 2. szám olyan elemet jelöl, mint egy rugalmas szalag, amelyre szükség van ahhoz, hogy az ajtó némi feszültséggel kinyíljon. Nos, a 3-as szám jelzi az Arduino-ra felszerelt motorvédő pajzsot.
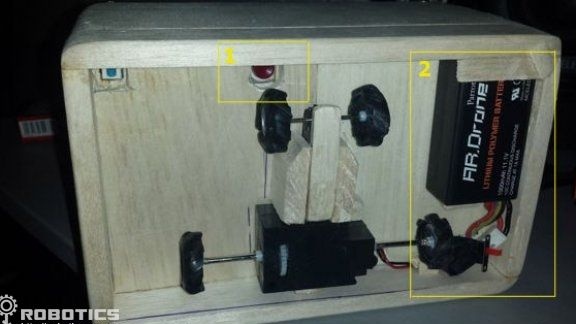
Ötödik lépés A doboz mozgatására szolgáló mechanikus rész beszerelése
A doboz alján található egy elem, kerekes motor, sebességváltó, alaphelyzetbe állító gomb és váltókapcsoló a robot teljesítményének vezérléséhez. Az elemek rögzítése előtt ki kell számítania a doboz súlyának egyensúlyát. Annak érdekében, hogy a robot stabil maradjon, a vezető tengelyen kívül újabb további is telepítve van.
Hatodik lépés Egy további kiegészítő szolgáltatás
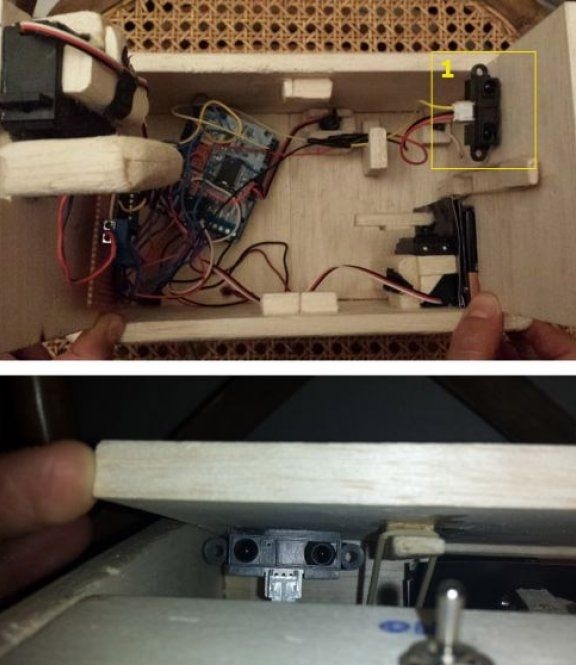
Annak érdekében, hogy a robot meghatározhassa a mozgás irányát, felszerelhető IR-érzékelővel. Ugyanakkor, amikor valaki megpróbálja megérinteni a kapcsolót, a doboz jobbra és balra mozog. Erre a célra a GP2Y0A21 érzékelő megfelelő, három vezetékkel rendelkezik. A sárga-t az Arduino harmadik csapjával, a vöröset az 5. érintkezőhöz és a feketét a földhöz kell csatlakoztatni.
Ez minden, készen áll egy egyszerű és ugyanakkor vicces robot is. Egy ilyen játék nem csak a gyermeket örömet kelti, hanem sok felnőttet is meglep.
Firmware: