
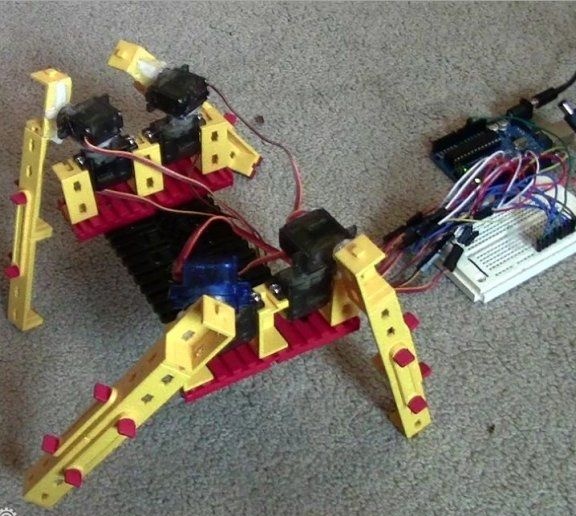
Azok számára, akik úgy döntenek, hogy kipróbálják képességeiket a robotika területén, és ezzel egyidejűleg szeretnék feltárni az Ardunio platform képességeit, egy nagyszerű módszer erre a pókrobot összeszerelésével, amelyet ebben a cikkben ismertetünk. Mivel a fő erő elemek, amelyek miatt a robot mozognak a szervosz. Az agyat illetően itt működik Arduinovalamint a Fischertechnik. A szerző szerint a robot elég érdekes és ígéretesnek bizonyult.
Anyagok és eszközök a gyártáshoz:
- pengék;
- forró ragasztó;
- Dremel (nagyon vékony fúrókra van szükség);
- csavarhúzó;
- fúró 7/32 fúróval;
- Phillips csavarhúzó;
- penge;
- rekesz elemhez;
- kenyérvágódeszka.
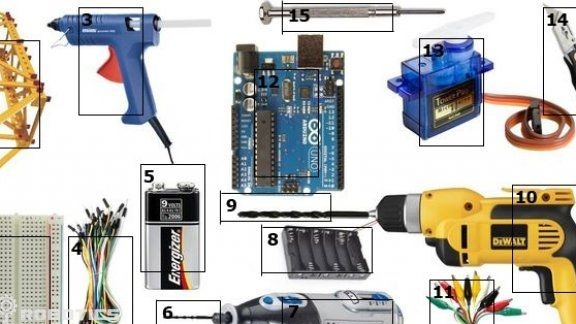
Az elektronikából a következőkre lesz szüksége:
- nyolc tartóval ellátott mikroszolgáltatás;
- 6 AA elem és ruhacsipesz;
- sok jumper és csatlakozó.
Mint a szoftver része, szüksége lesz egy tápegységgel ellátott Arduino-ra.
És az alkatrészekhez Fischertechnik készletre van szükség.
A robot gyártási folyamata. :
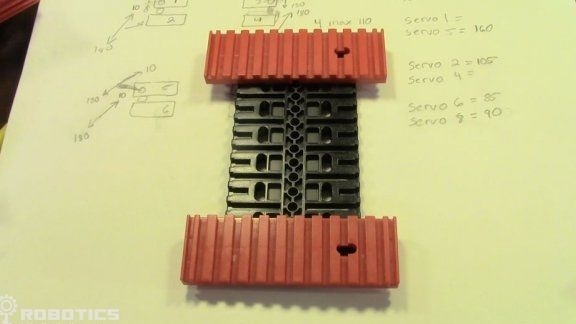
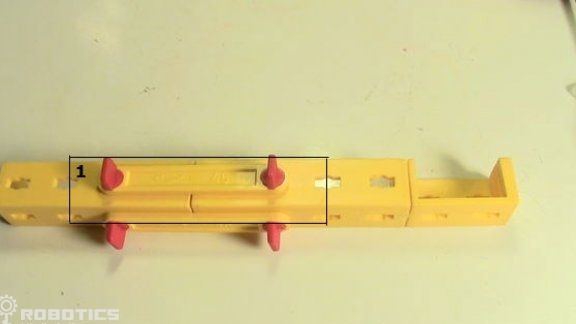
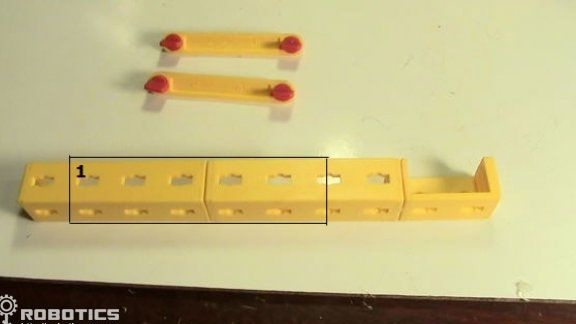
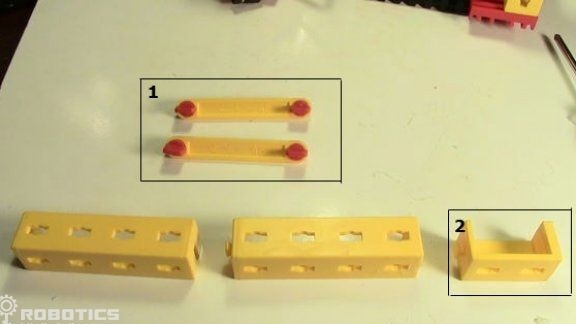
Első lépés. Hozzon létre egy robot keretet
A keret elkészítéséhez szüksége van egy Fischertechnik készletre. Hogyan kell kinéznie, láthatja a képen. A keret létrehozásához három magas "téglára" van szükség, négy lyuknak kell lennie közöttük. Pontosabban ebben Házitermékek egy 11 vágással rendelkező elem kerül felhasználásra. Fontos ellenőrizni, hogy minden szervoszavar működik-e.
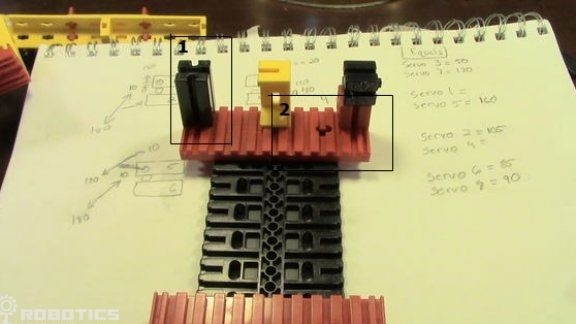
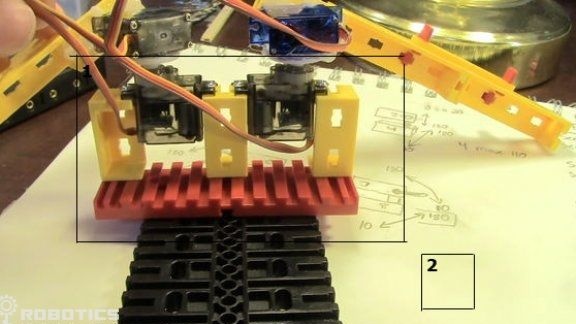
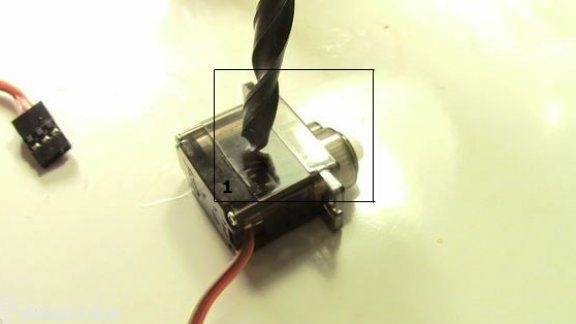
Második lépés Telepítse a szervoszt
A szervót a "tégla" közé kell telepíteni. A szervókat csavarokkal rögzítik, erre a célra először fúrjon lyukakat a rögzítési pontokba dremel segítségével. Fúrjon ki a legkisebb átmérőjű lyukakat. A forró ragasztó azonban ezekre a célokra is megfelelő, de ebben az esetben a forma elválaszthatatlan.
A második szervó a másik oldalra van fordítva.
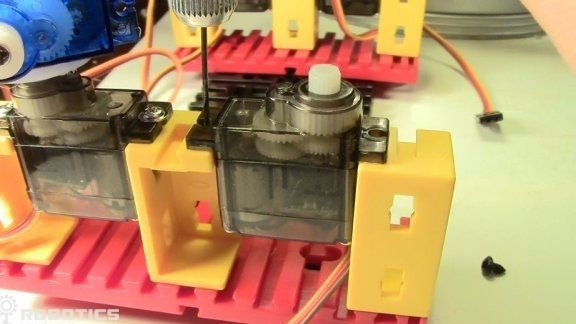



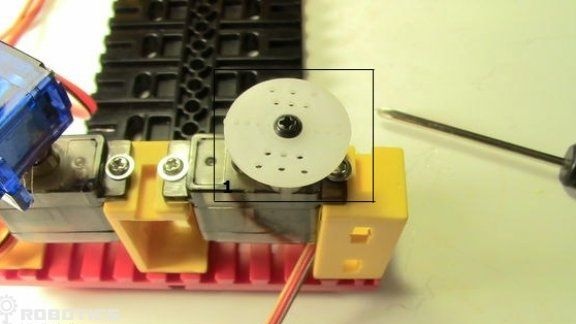
Harmadik lépés Az egyik szervomotor felszerelése a másikra
Mindenekelőtt a szervók szerelőelemeivel kell foglalkoznia. Ha a motor ellenkező irányba forog, akkor teljesen jobbra kell forgatni.Hogyan lehet ezt megtenni, a képen látható.
Pontosabban, ebben az esetben a szervócsavarnak ki kell emelkednie a műanyag fölött, így mozgatható lesz. A második szervo házában mélyedést kell készíteni a csavarfej alatt.
Mi
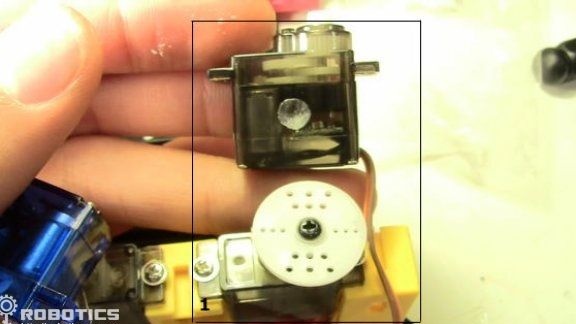
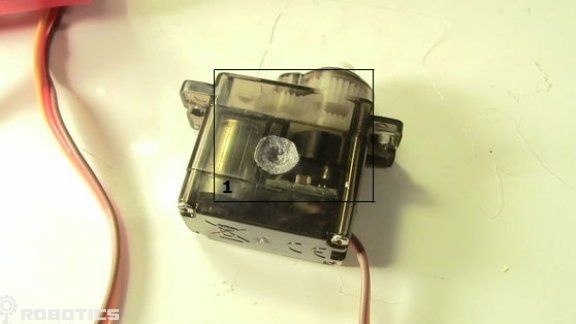
A két szervosz csatlakoztatásához forró ragasztót használnak.
Negyedik lépés Csatlakoztassa a lábakat
Hogyan készítsünk lábakat, láthatjuk a képen. Négynek kell lennie.
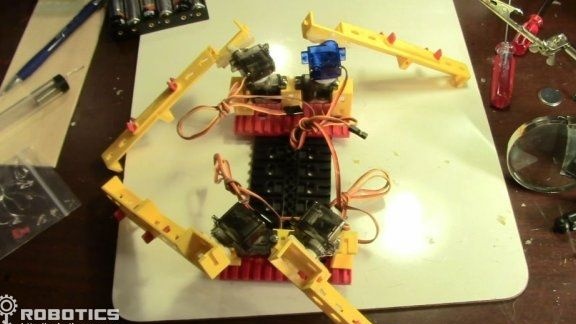
A lábak összeszerelése és a robothoz történő csatlakoztatása után a kialakításnak úgy kell kinéznie, mint a képen.
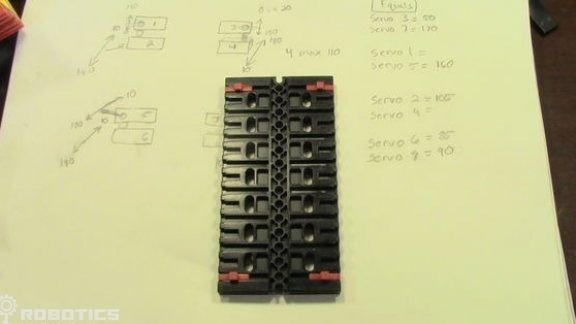
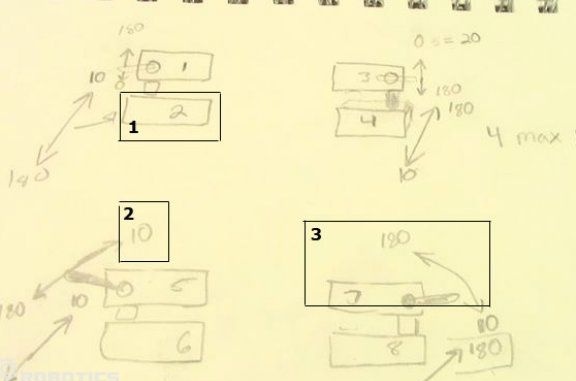
Ötödik lépés Diagram létrehozása egy kapcsolathoz
A diagramra szükség van annak megértéséhez, hogy az egyes szervók milyen szöget tudnak fordítani. Ezután mindegyik szervómeghajtóhoz egy adott számot rendelnek, és e szám alapján firmware készüléket hoz létre a robot számára.
Hatodik lépés prototípus tábla
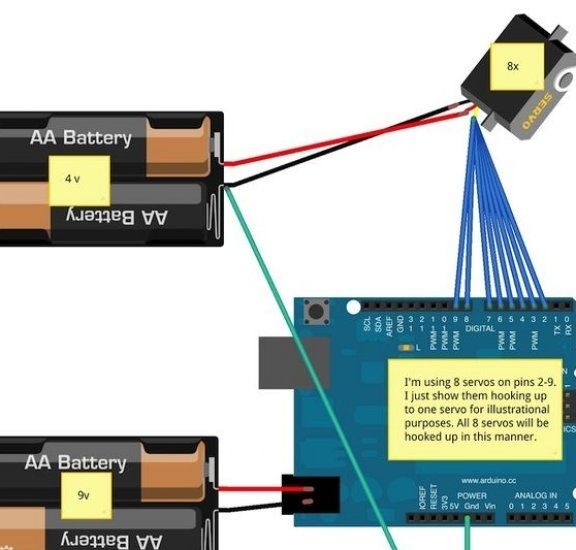
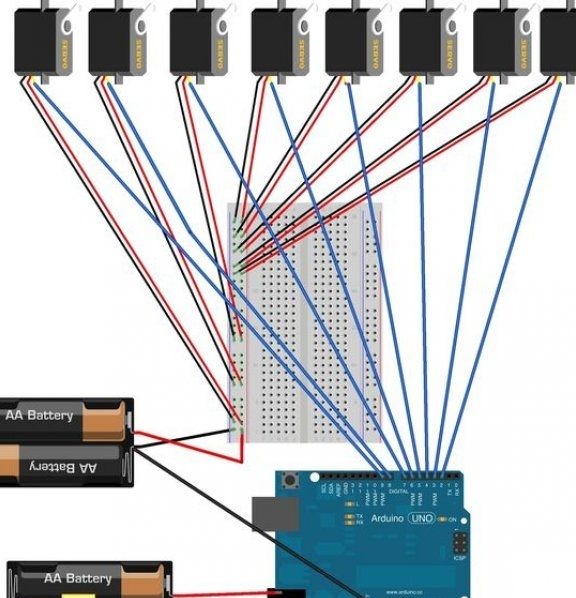
Ki kell húznia mind a 30 jumpert. Ezután mindent össze kell kötni vezetékekkel, ahogy az az ábrán látható. Mindegyik szervohajtásnak három érintkezője van, az egyik felelős a földelésért, az egyiket az áramellátás biztosítja, a másikra pedig a motor vezérléséhez van szükség.
A Vcc és GND szervócsapokat csatlakoztatni kell a Vcc és GND elrendezési csapokhoz. Ezenkívül egy 7,5 V-os tápegység is csatlakozik a GND és Vcc elrendezési csatornákhoz.
A szervo vezérléséhez szükséges vezetékeket narancssárgára és sárgare festették. Csatlakoznak a 2. és a 9. érintkezőhöz. Például, az első motor érintkezője kapcsolódik az Arduino második csapjához. A második motor már csatlakozik a harmadik érintkezőhöz és így tovább.
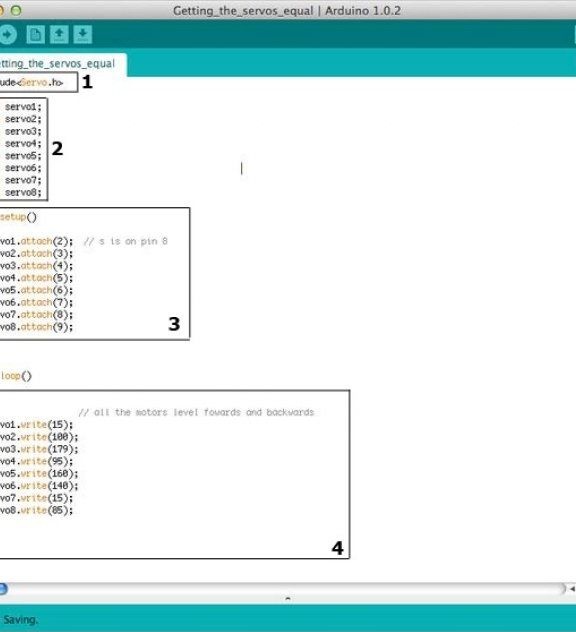
Hetedik lépés. Állítsa be a szervoszt.
Ideje elkészíteni a robot programkódját. Mindenekelőtt az Arduinón új projektet kell létrehoznia a motorok szinkronizálására. Hogyan néz ki a kód, láthatjuk a képen. Ennek a kódnak köszönhetően a robot lábai igazodnak.
Annak érdekében, hogy a pók felemelkedjen, létre kell hoznia egy másik projektet, amelyet Fel és Le hívnak. Ennek a kódnak köszönhetően a pók lábai fel-le mozoghatnak.
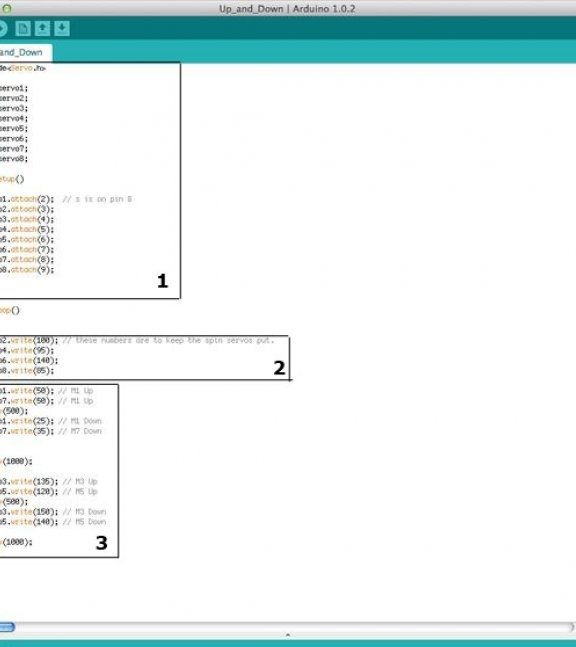
Annak érdekében, hogy a robot előre-hátra mozoghasson, új projektet kell készítenie. Hogyan fog kinézni, láthatja a képen.
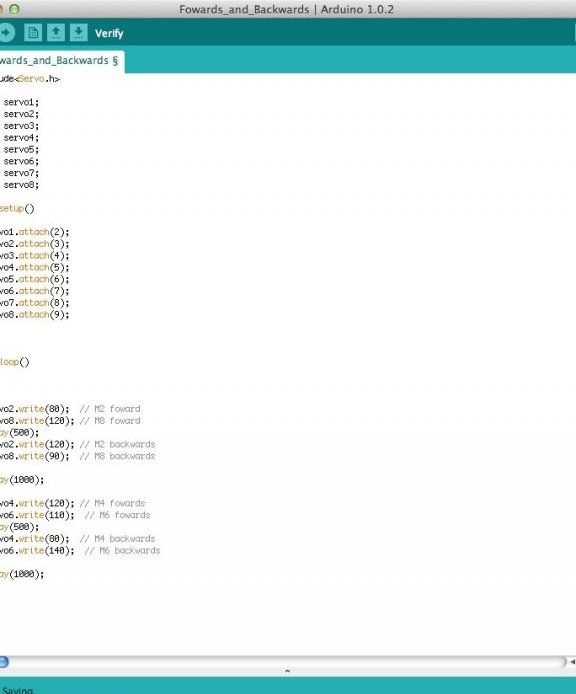
És végül, ahhoz, hogy a robot elinduljon, össze kell kombinálnia az elülső és a hátsó részt. Mint megjegyezhető, a robot programkódja négy blokkból áll.
Ez minden, a robot készen áll. Most rá lehet szerelni különféle érzékelőket, amelyek lehetővé teszik a robot számára, hogy az űrben navigáljon. Azt is elkészítheti a robot kezével, hogy tárgyakat vihessen el. Általában minden a robotgyártó lelkesedésétől és képzeletétől függ. A robot azonban még ebben a formában is érdekes módon viselkedik.
Firmware: