
A cikk példát mutat egy ilyen robot összeszerelésére csináld magadsok pénz és erőfeszítés nélkül.
A válasz arra a kérdésre, hogy miért a robot fából készül, nagyon egyszerű. Ez az anyag kevés súlyú, kellemes vele dolgozni, ráadásul a fa a legkönnyebben elérhető és szinte ingyenes anyag. Annak érdekében, hogy a robot a lehető legolcsóbb legyen, olcsó, alacsony teljesítményű szervókat kell használnia. Ahhoz, hogy ezek a motorok működjenek, a kialakításnak a lehető legkisebbnek kell lennie; e célokra ez a fa a balsa típus a legmegfelelőbb. Ezenkívül az ilyen fát nagyon könnyű feldolgozni.
Anyagok és eszközök robot létrehozásához:
- 12 Tpro típusú szervó - SG90;
- balsa fa téglalap (36 x 6 x ½ hüvelyk), Dow (36 x 3/3 hüvelyk), Dow (12 x 1/8 hüvelyk);
- Uno típusú Arduino áramkör;
- motor típusa PWM - TLC5940;
- 14 ellenállás névleges értékkel 4,7K, 1,7K, 10K Ohm;
- 10 uF kondenzátor;
- 538 - 42375 - 1856 csatlakozó (hím);
- Protoboard 589 - 8200 - 4565 típusú;
- 6 voltos akkumulátor, 5000mAh kapacitással (a rendelkezésre állás opcionális);
- ADXL345 típusú 30 tengelyes gyorsulásmérő.
Szükséges eszközök:
- 1/8 méretű fúró;
- kés éles pengével;
- forró ragasztó és asztalos ragasztó;
- forrasztópáka.
Ez az eszköz- és anyagkészlet elegendő egy robot létrehozásához. Szállítás nélkül az összes elem összesen legfeljebb 100 dollárba kerül.
Ha pénzt akar megtakarítani, akkor nem telepíthet akkumulátort a robotra, az energiáját egy 5-6 V-os tápegység segítségével lehet táplálni.
Annak érdekében, hogy a robot megkönnyítse az egyensúly fenntartását, rá van szerelve gyorsulásmérő, de itt már szükség lesz speciális programozási ismeretekre.
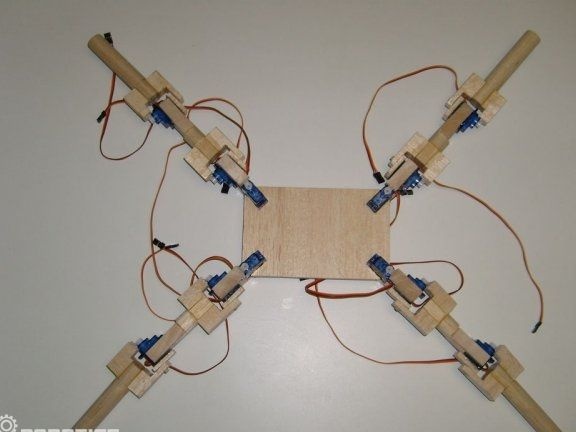
Első lépés. Hogyan készítsünk egy robottestet?
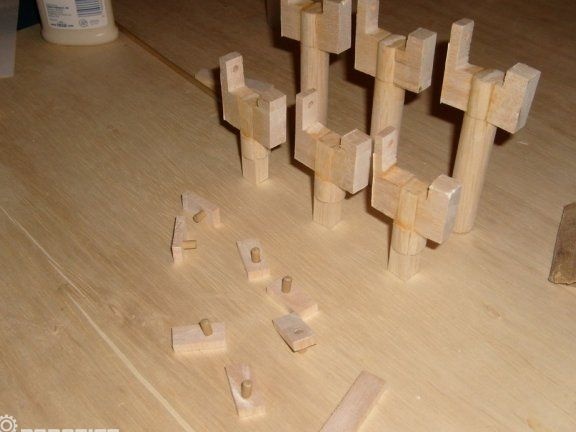
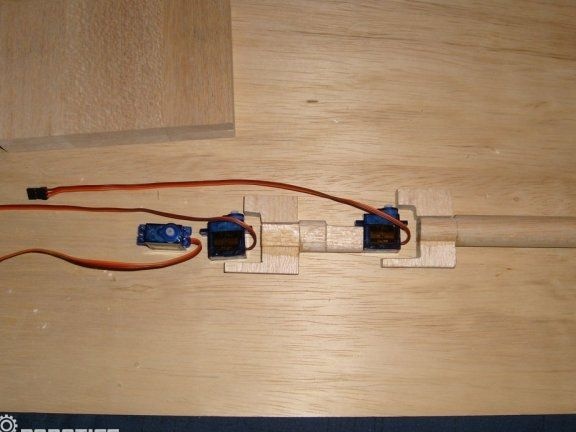
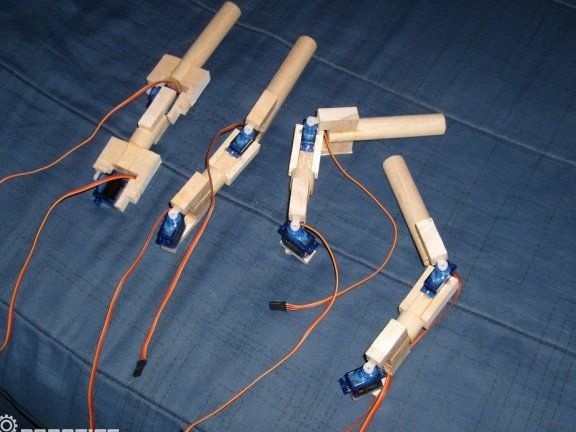
A robot legnehezebb eleme a láb. A legfontosabb az, hogy először egyet csinálj, aztán mind a négy nem nehéz.
A parafaval való munkához csak egy szerszámra van szüksége - egy késre. A legjobb az asztalnál dolgozni, akkor következetesebb és párhuzamosabb vágásokat fog végezni.
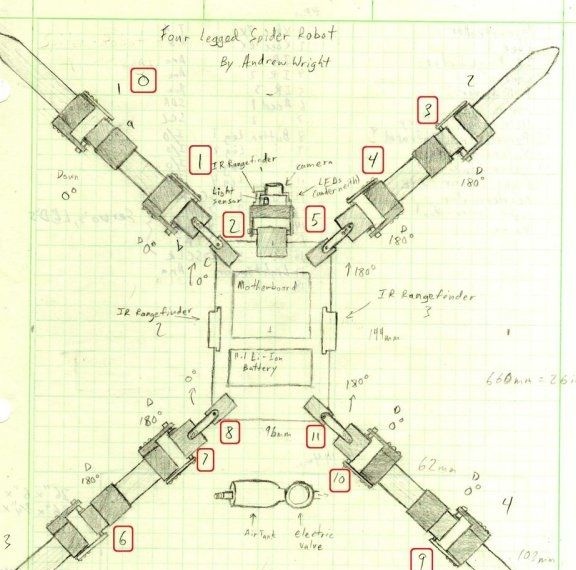
A robot első lábának elkészítéséhez látnia kell, hogyan kell kinéznie. Ehhez a szerző csatol egy fényképet, amely különféle lehetőségeket kínál a robot lábának elkészítéséhez. A lábak gyártásánál különös figyelmet kell fordítani a pofonra.
Az ábrákon a szervosz érintkezői is láthatók.Szükségük van a lábak erősítésére és a szervomotorok tengelyének terhelésének csökkentésére.
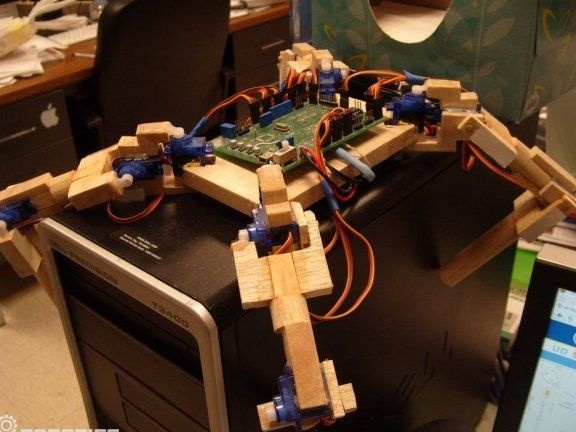
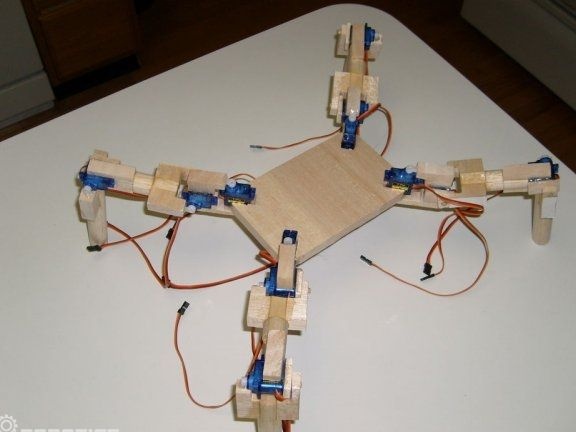
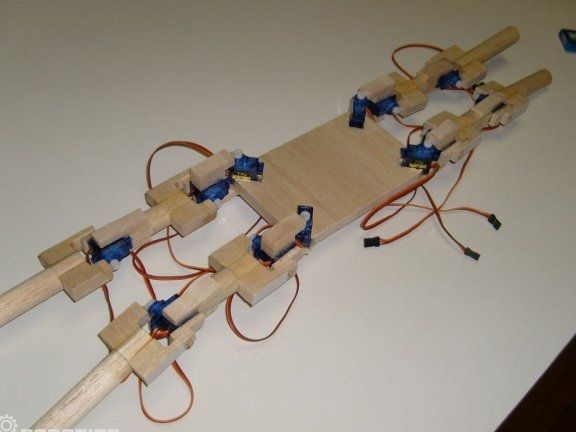
Ha a robot gyomráról beszélünk, akkor ez egy téglalap, amelynek széleiben mélyedések vannak a szervó telepítéséhez.
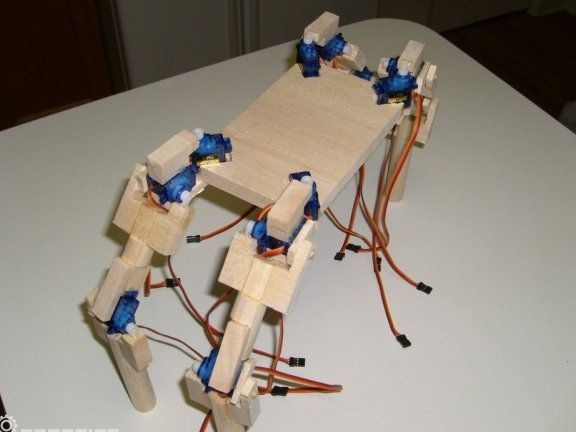
A balsa ragasztásához a legjobb ácsragasztó használata, mivel megbízható kötési szilárdságot biztosít. Még a fa ragasztója is felvihető a fa külső részére, hogy az anyag erősebb legyen.
Forró ragasztóval kell a szervót a fához rögzíteni. De a gyakorlat azt mutatja, hogy egy ilyen kapcsolat lehet, hogy nem megbízható, ezért tanácsos átgondolni és javítani a szervót más módon.
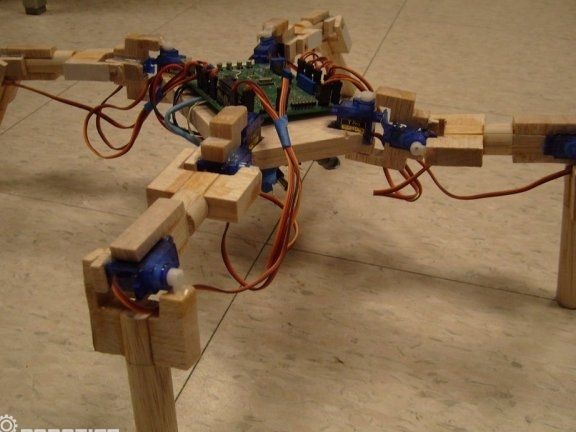
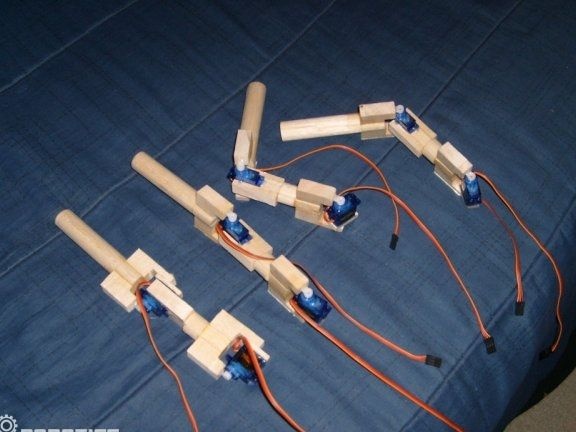
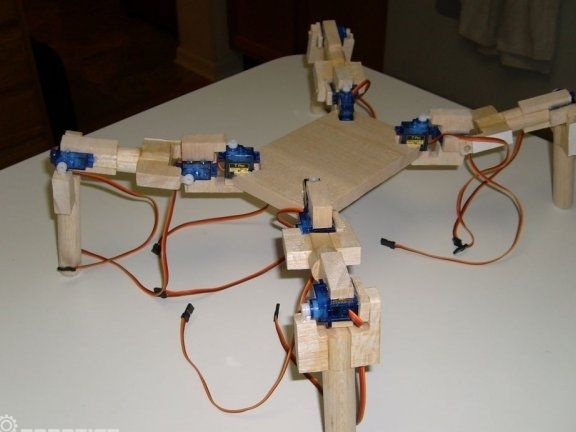
A javasolt robotprojekt egyik jellemzője, hogy a lábak 180 fokkal meghajlanak, tehát a robot fejjel lefelé járhat.
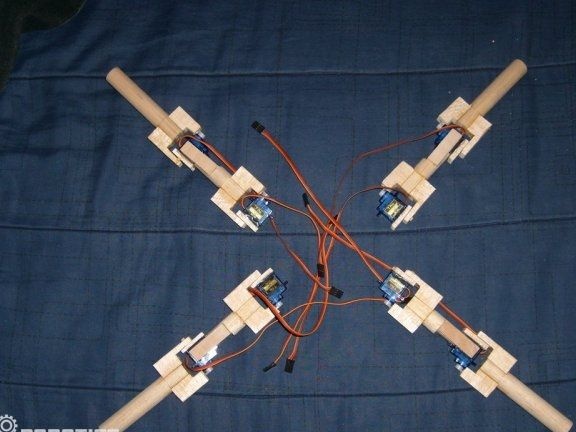



Második lépés Hogyan van elrendezve elektronikus a robot része
Kezdetben a kör nagyszerű funkcionalitással bírt, de könnyebb volt egyszerűsíteni, és most csak egy feladata van - hogy a robot járjon. Ha a költségvetésnek van bizonyos forrása, akkor a rendszert gyorsulásmérővel lehet hozzáadni. Itt nagyszerű kiegészítés lesz.
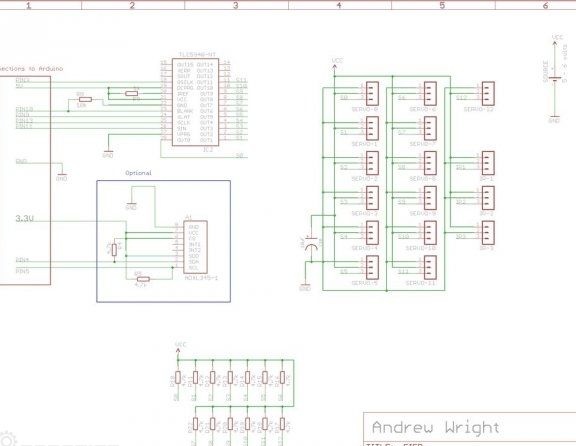
Ha megnézi az ábrát, láthatja az 5-6 voltos áramforrást. Ez a robot fő áramforrása, ez elég a normál működéséhez. A szervók táplálásához nem kell Arduino tápegységet használni. Csak a PWM motor táplálására kell használni Arduino tápegységet.
Az összes elem elhelyezéséhez a legjobb egy nyomtatott áramköri lap létrehozása. A PCB Advanced Circuits távadója itt nem lesz helyén, mivel a projektet gyakran példaként mutatják be az iskolákban.
Harmadik lépés Robotprogram kódja
Az alábbiakban letöltheti a kész firmware-t a robot számára. ha Házitermékek megfelelően összeállítva, akkor amikor elindul, a robotnak fel kell emelkednie, és el kell fordítania a mancsát.
A kód működéséhez telepítenie kell a TLC5940 illesztőprogramokat, amelyek letölthetők a következő webhelyről:.
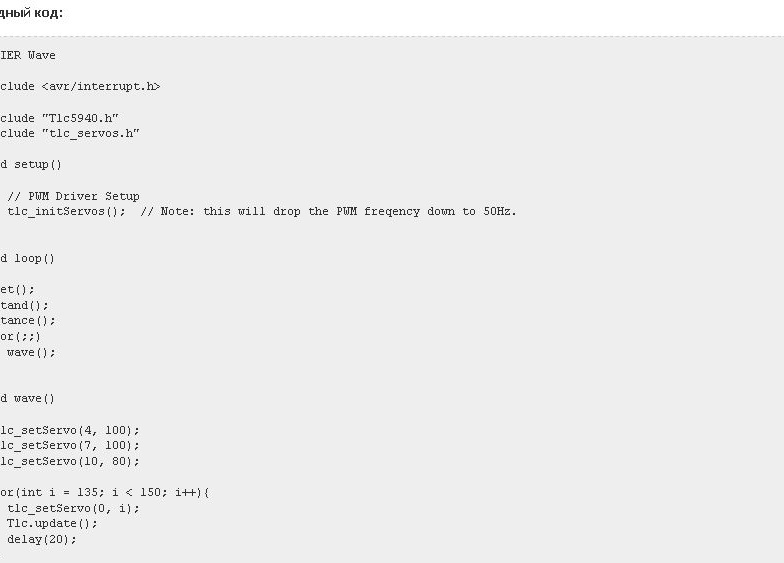
A robot tesztelésekor egy hiba fordulhat elő, miközben a lábak egymással ellentétes irányba mozognak. A probléma legegyszerűbb módja a kód megváltoztatása. Ha megnézi a kódot, láthat néhány funkciót, amelyek úgy néznek ki, mint a tlc_setServo (4, 100). Az első paraméter itt a motor irányítását jelenti. És a második paraméter felelős a szervo szögéből. A probléma megoldásához csak meg kell változtatnia a második paramétert.
Most a robot készen áll és tesztelheti. Amikor elindítják, nagyon érdekes lesz mozgatni a lábad, mint egy pók. A robot frissítéseként telepíthet egy kamerát, különféle érzékelőket és egyéb elemeket, amelyek jelentősen elősegítik annak funkcionalitását és képességeit.