
Ez az a robot bluetooth okostelefon által vezérelt. Az okostelefon gyorsulásmérője méri a telefon bal / jobb szögét felfelé / lefelé, ezeket az adatokat használja az irányított motorok sebességének kiszámításához, az adatokat Bluetooth-on továbbítja a Arduino
Amire szükséged van egy robot felépítéséhez?
Arduino uno, HC-06 Bluetooth modul, két 300 fordulat / perc 12v sebességváltó motor, H-bridge L298N Dual H Bridge motorvezérlő
12-1,3 A ólom-sav akkumulátor. Minden motor 0.4A-t fogyaszt, plusz a vezető logikája. Arduino vezetékek, szokásos 9 V-os elemek és csatlakozó az akkumulátor és az Arduino csatlakoztatásához. Elektromos vezetékek elektromos motormeghajtók csatlakoztatásához. USB kábel. Telefon Android 4-es vagy újabb verzióval. 4 forgó 50 mm-es gumikerék a Screwfix-től vagy a Toolstation-tól; két Lynxmotion HUB-02 univerzális kerékagy.









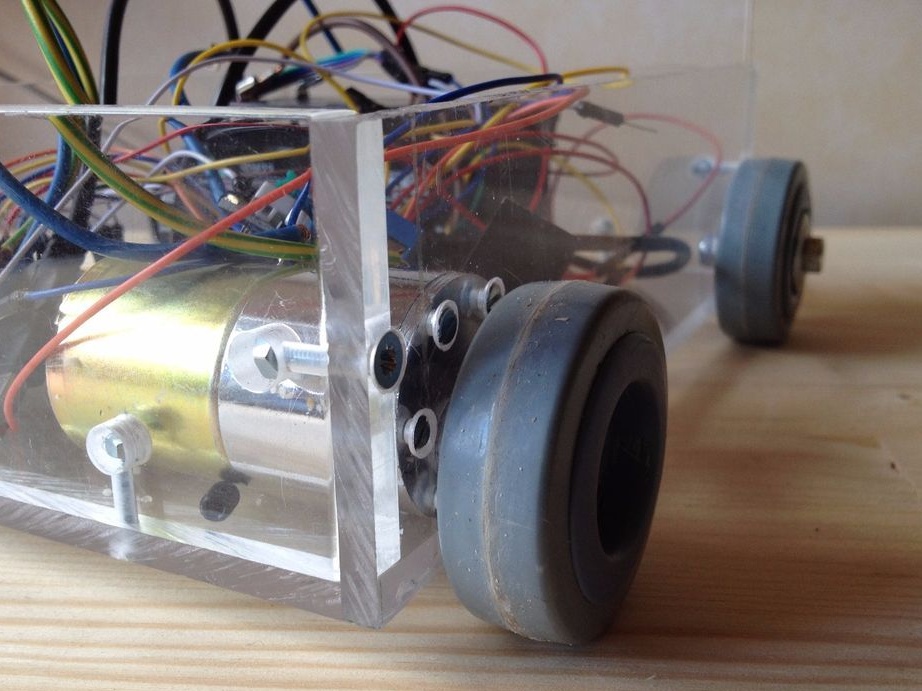
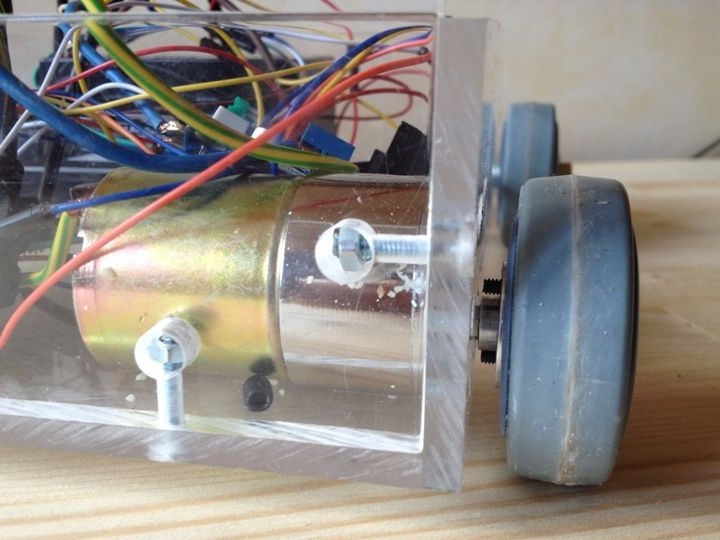
A tok 22 cm hosszú és 17 cm széles műanyagból van összeállítva. Két motort kell csatlakoztatni a tengelyhez és rögzíteni menetes csappal.
Első kerekek
A gumit eltávolítják a hengerekből, és az agyon lévő lyukakkal összhangban két lyukat fúrnak be. Az agyak menetes csapokkal vannak rögzítve a házon áthaladó tengelyekre. Ezután a hengereket rögzítik az agyakon, és rá vannak gumi.
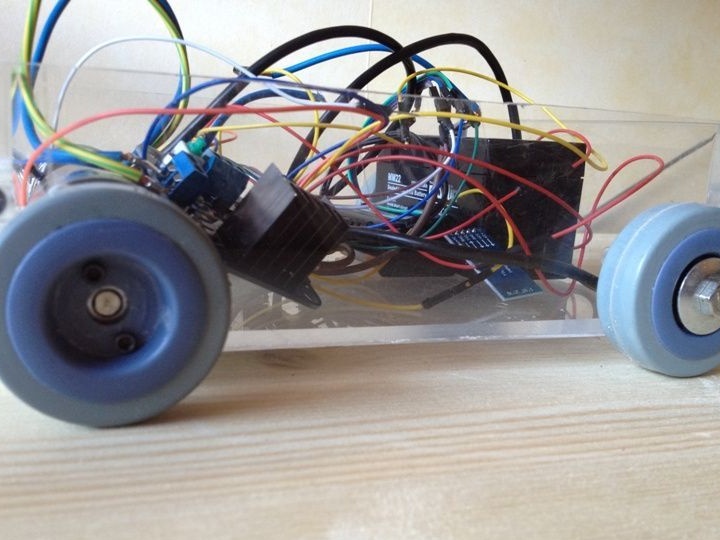
Hátsó kerekek
A hátsó kerekeket egyszerűen le lehet csavarni a csuklópántról, és a házba fúrt furatokkal rögzítik.
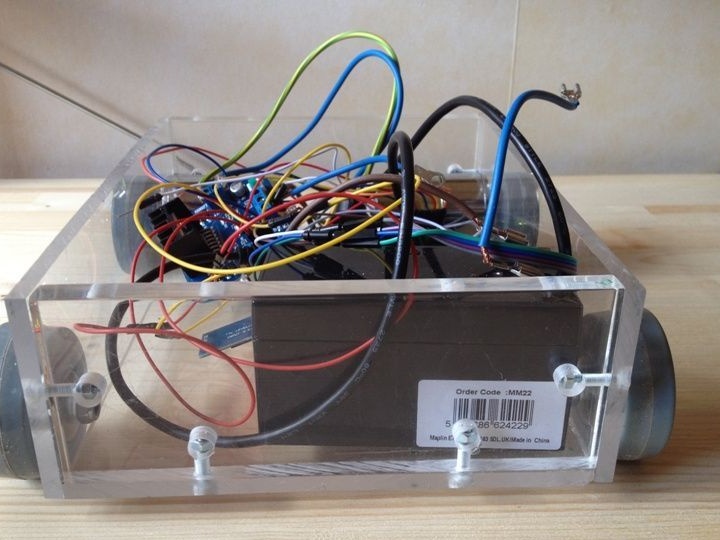
Elektromos csatlakozások.
Probléma merül fel a programkód betöltésekor Arduino-ban. Ennek oka az a tény, hogy a Bluetooth modul, annak RX \ TX érintkezői, az Arduino 1. és 2. érintkezőivel vannak csatlakoztatva, amelyek szintén adatátvitelre szolgálnak USB-n keresztül. A csatlakoztatott könyvtárban meg kell változtatni az 1 és a 2 érintkezőket 11-re és 12-re, amelyeket az adatátvitelhez használnak.
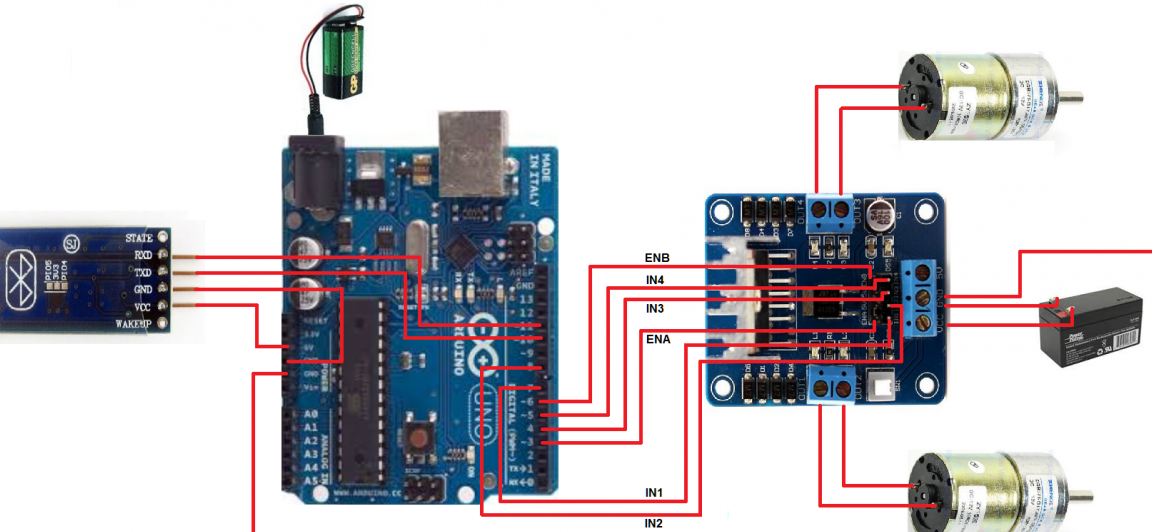
A motorvezetőnek nincs szüksége külön tápegységre a logika számára. A 12 V elegendő ahhoz, hogy táplálja a vezető logikáját és magát a motort. Az akkumulátor mínuszát az Arduino-hoz és a motorvezetőhöz kell csatlakoztatni. Az ECA / 5V és az ENB / 5V motormeghajtó érintkezői áthúzhatók. Az Arduino-hoz való csatlakozás előtt el kell távolítani. Semmit nem szabad csatlakoztatni a két 5 V-os érintkezőhöz.
Android kód.
A csatolt fájlt ki kell csomagolni és importálni kell az Android Studioba, be kell csomagolni apk-ba és telepíteni a telefonra.
Kulcsfájlok:
Párosított eszközök tevékenysége:
deviceList.java
activity_device_list.xml
LED és mozgásvezérlő tevékenység:
ledControl.java
activity_led_control.xml
nyilvánvaló:
AndroidManifest.xml
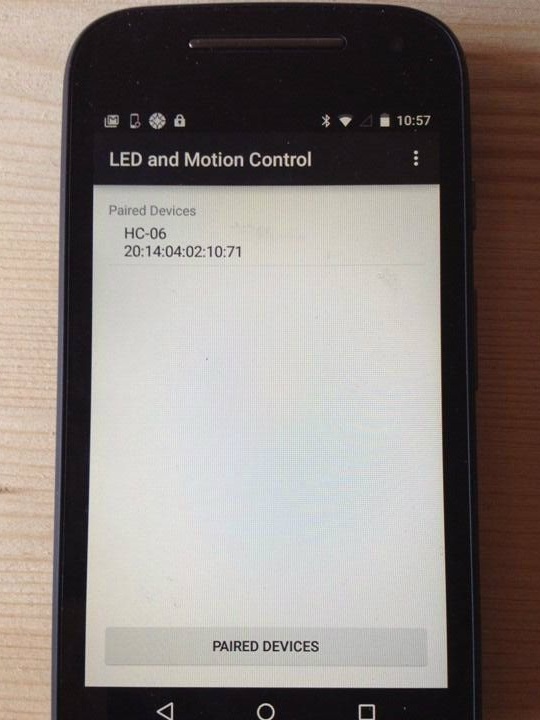
Párosított eszközök tevékenység mutatja az elérhető Bluetooth-eszközöket. Amint az eszközök csatlakoztatva vannak, a vezérlés átkerül a LED-hez és a mozgásvezérlési tevékenységbe.
A be / ki gombok „be” vagy „ki” üzenetet küldnek az Arduino-nak, be- vagy kikapcsolva a beépített LED-t. A telefon gyorsulásmérője, amely x / y értékeket továbbít az érzékelőből, minden alkalommal, amikor ezek az értékek megváltoznak, vezérli a mozgást. Ennek alapján Arduino kiszámítja a motorok 0 és 255 közötti sebességét és forgásirányát. Ezeket az Arduino értékeket „L-255:” vagy „R100” stb. Formában továbbítja. Ennek alapján az Arduino a bal oldali motor fordulatszám-parancsait továbbítja az ENA-hoz, a jobbikat az ENB-hez, és megváltoztatja a forgás irányát úgy, hogy polaritását IN1-re, IN2-re balra, N3-ra és N4-re a jobb motorokhoz irányítja.