
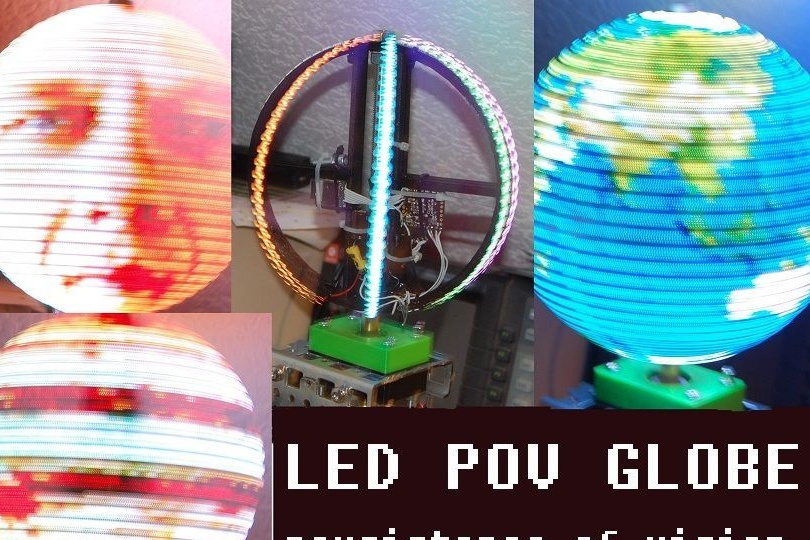
Ez az oktatóprogram arról szól, hogyan lehet POV-világot kevesebbel felépíteni. elektronikus alkatrészek, mint más hasonló eszközöknél. RGB LED-ek segítségével, integrált APA102 vezérlővel. Ez megtakarítja a sok huzal forrasztását. Tudod többet megtudni róluk. Ezeknek a LED-eknek nincs szükségük további meghajtóra. Két módon kapcsolódnak közvetlenül a mikrovezérlőhöz. Ez lehetővé teszi a LED-ek nagyon gyors váltását. A stabil kép érdekében az SPI-szinkronizálás 10 MHz frekvencián történik. A formatervezés további pluszja egy flash kártya használata, amely a képet BMP formátumban tárolja.
1 Szükséges anyagok

A földgömb tengelyéhez a következőkre lesz szüksége:

1. Csavar M8 menettel és 250 mm hosszú
2. Anya M8
3. Sárgaréz hüvely 10 mm és 100 mm hosszú
4. Műanyag alátétek, 8 mm 2 darab (STL-fájlokkal együtt)
5. tengelykapcsoló azok számára, akik a NEMA 17 léptetőmotorot használják
A tengelyen lévő LED-gyűrű táplálásához szüksége lesz
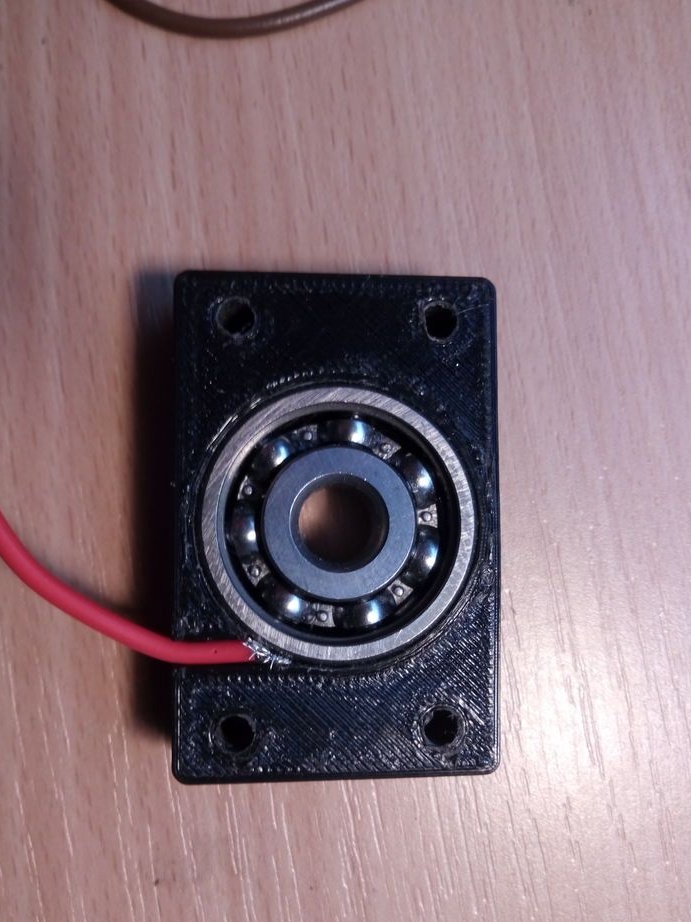
1. golyóscsapágy 6300 (10x35x11)
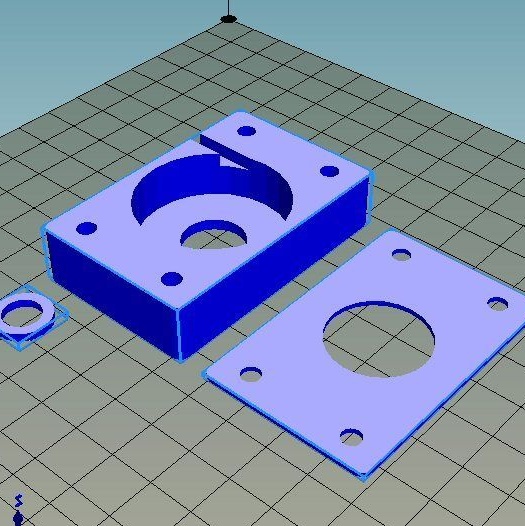
2. két tartó csapágyakhoz. 3D nyomtatóra nyomtatva vagy fából készült.
3. Négy M4x40 csavar anyával
4. Hegyekre vonatkozó tippek 2 db 8mm
5. 5 mm-es tengelyátmérővel
6. 4 csavar M4 a motor felszereléséhez
7. talán rajongója.
Alternatív megoldásként bármilyen motort használhat a megfelelő nyomatékkal és fordulatszám-szabályozással. Az ebben a kialakításban használt motor maximális nyomatéka 50A áram mellett van, de a működés során a maximális áramfogyasztás csak 18A.
A szervomotor meghajtó vezérléséhez használja
1.
2. két gomb
12 V-os tápegység motorhoz és 5 V-os LED-ekhez. Tápegységként használhatja a régi egységet a számítógépről. Vásárolhat egy 12v / 5A-os tápegységet, és csatlakoztathatja hozzá
A LED gyűrűhöz a következőkre lesz szüksége:
1.664 LED-ek 2 csík 32 darab
2. Kondenzátor 1000µF 10 V
3. Hall érzékelő és mágnes
4. A felhúzó ellenállás 1k, 10k
5. A gyűrűt 3D-s nyomtatóra kell nyomtatni, vagy használjon egy darab PVC-csövet
6. Műanyag kötés (100 mm)
7. Egy jó ragasztó, amely összeragad és 2500 fordulat / perc sebességgel nem szétszóródik
Szüksége lesz egy Parallax Propeller mikrovezérlőre. Vagy használhat másik a modell vezérlő, de emellett vegyen fel díjat:. A vezérlő programozása és villogása olyan egyszerű, mint a Arduino. Mindkét vezérlő programozásához USB-TTL adapterre lesz szüksége.
Ház.
Lakás házi Bármilyen nehéz tudsz venni. A legfontosabb dolog az, hogy biztonságosan rögzítheti a motort és a csapágyakat.
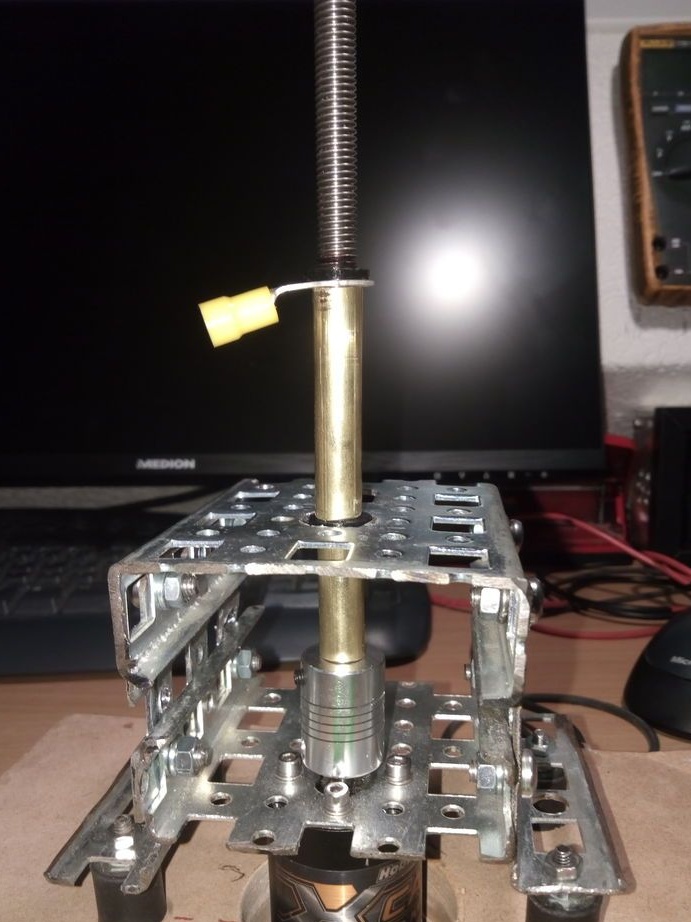
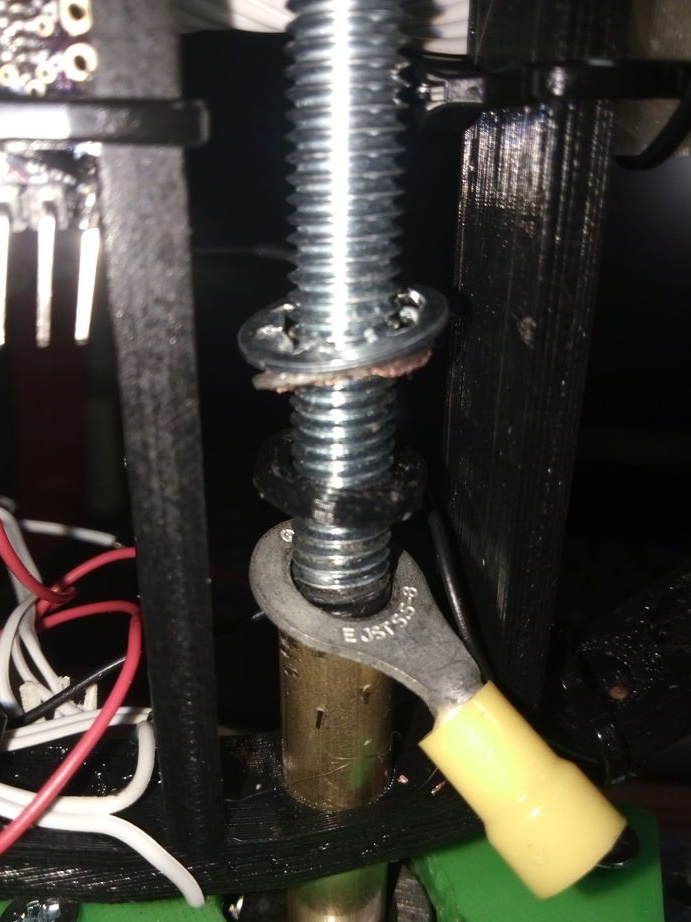
A hajtótengelyhez 250 mm hosszú csapot használnak.A sárgaréz perselyek hossza 50 és 30 mm. A gyűrű méretétől és a tengely hosszától függ. A felső és a hosszabb hüvelyt el kell választani a csapszegtől, mivel arra szolgál, hogy plusz energiát támasszanak a LED-ekre. Ehhez tekerje le az elektromos szalagot a hajtűre vagy hőre zsugorodjon, két műanyag alátétre is szükség lesz. A hüvelyt 8,5-9 mm-ig kell fúrni, különben nem fog beleilleni. A másik hüvely a rúddal negatív érintkezést képez.
A mínuszteljesítményt egy speciális horonyba helyezzük, és a tartóban lévő csapágyhoz nyomjuk, amely kinyomtatható egy nyomtatóra. Zárójel STL fájl az archívumban.


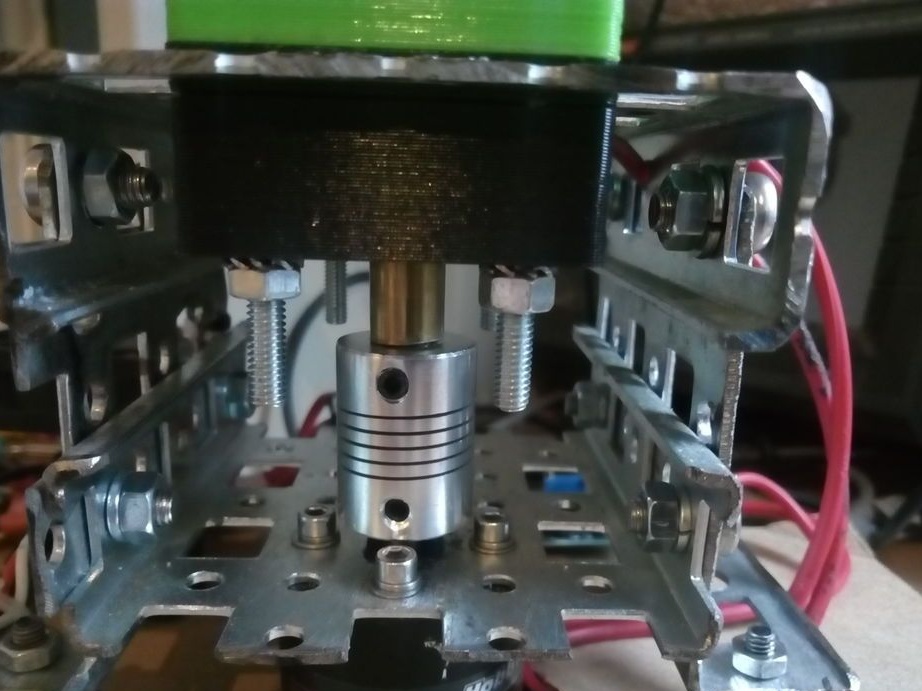
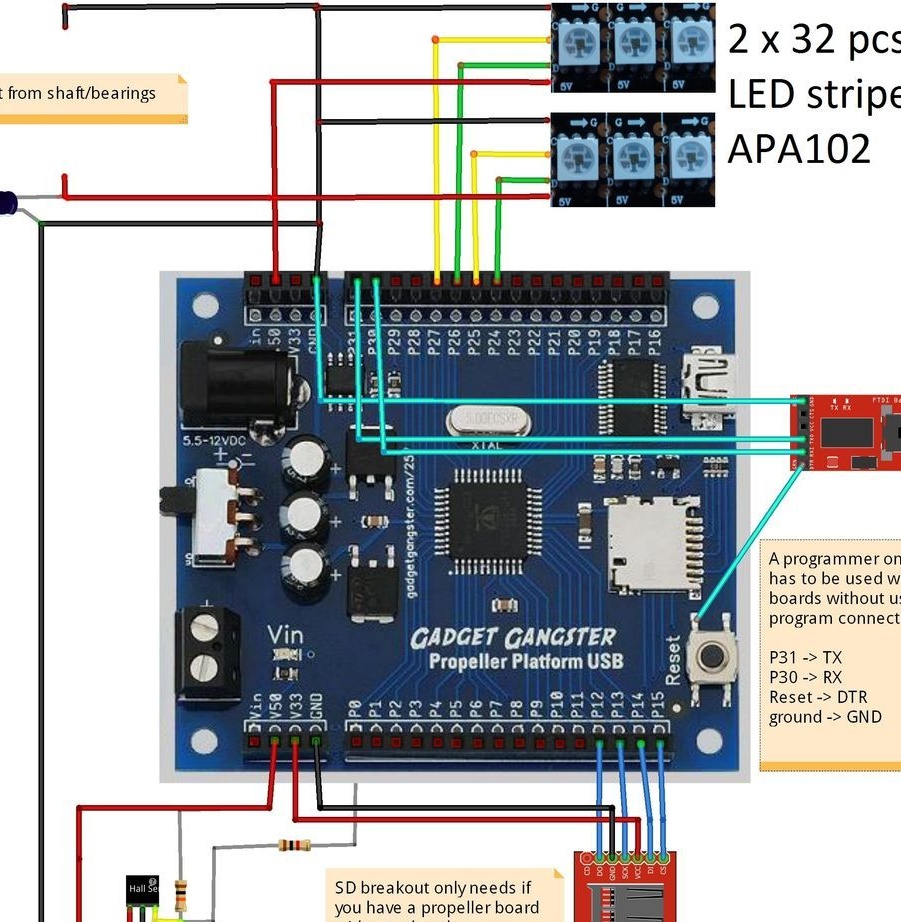
Most csatlakoztatnia kell az elektromos motort, az ábra szerint.
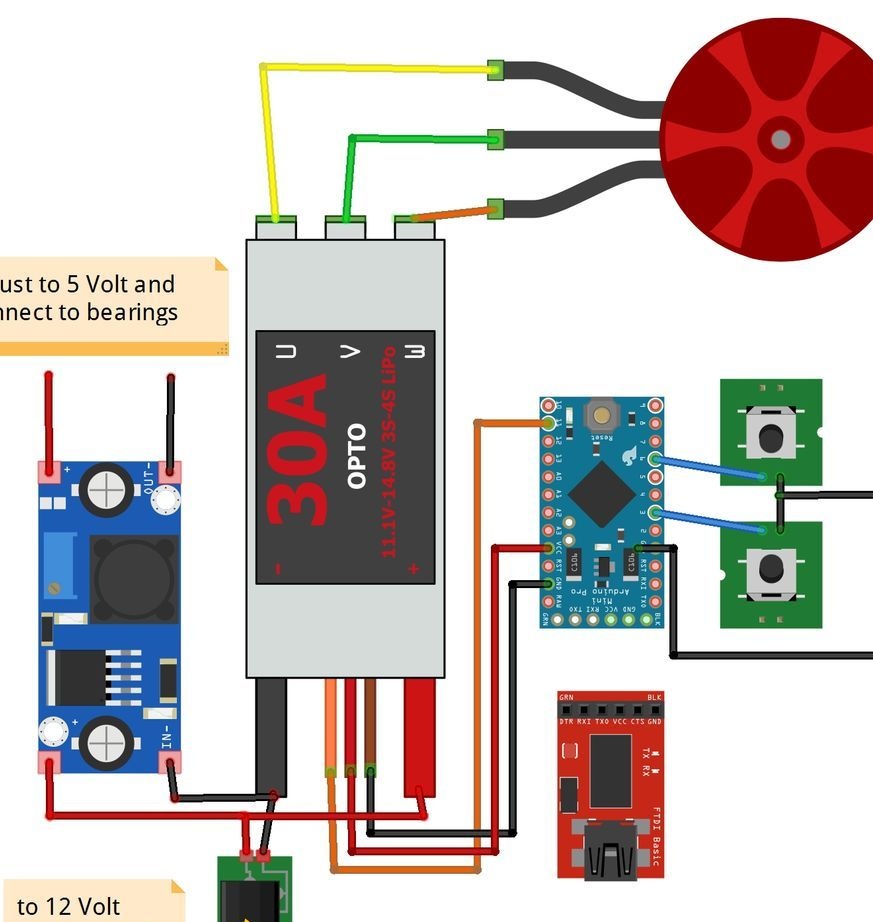
A diagram két gombját használja a sebesség beállításához. Amikor bekapcsolja a készüléket, az ESC értéke 500 μs lesz. A motor bekapcsolásához nyomja meg az egyik gombot. A vázlat értéke „StartPos = 625”. Később, amikor beállítja a sebességet, ez az érték megváltoztatható. Nyomja meg a gombot két másodpercig, és a motornak le kell állnia.
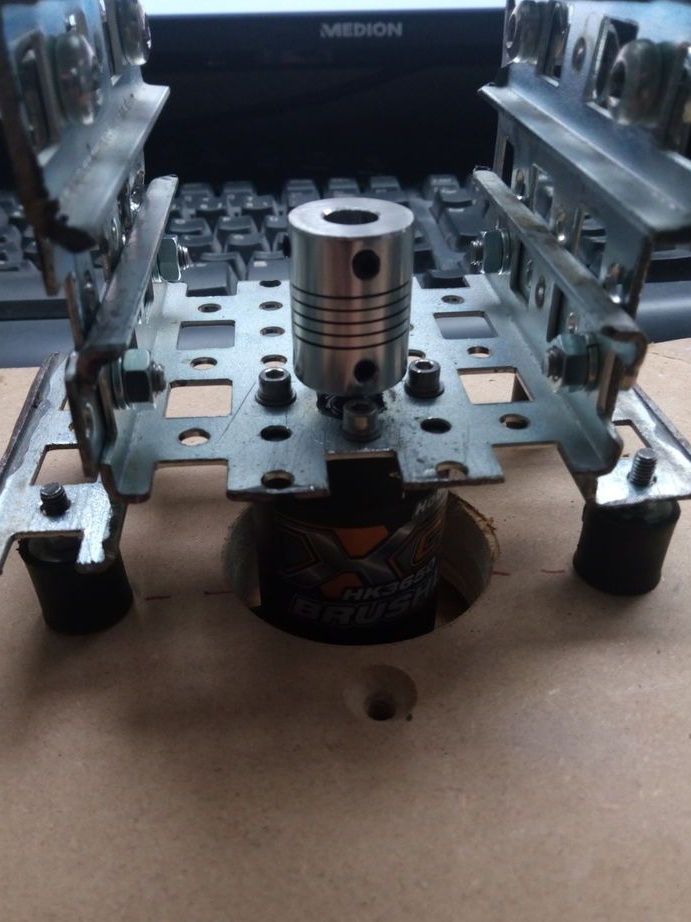
A magszerkezet összeszerelése.
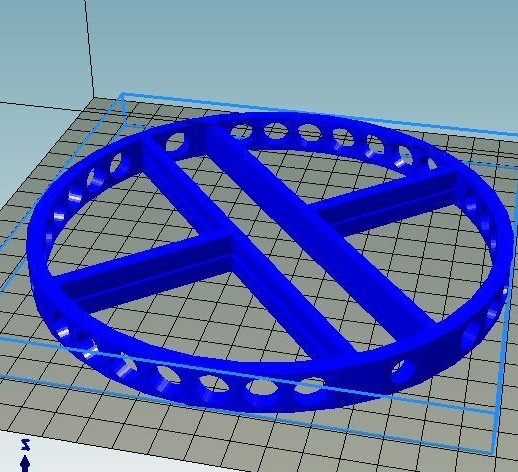

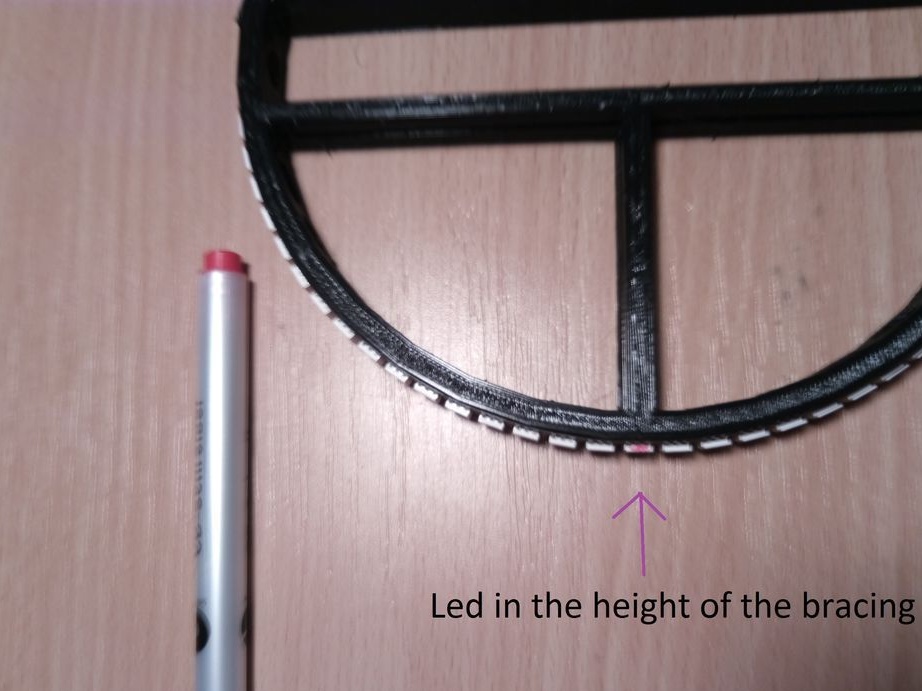
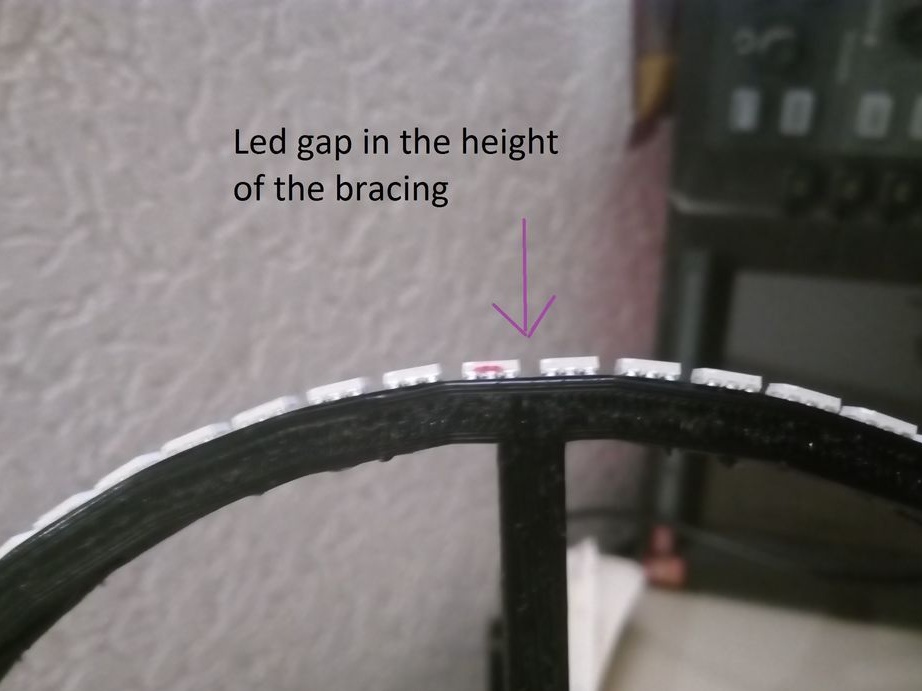


Ehhez maga a gyűrűt nyomtassa ki a mellékelt fájlból. A szerző sok lyukat tett benne a súlycsökkentés érdekében. Használhat egy darab PVC-csövet. Két 32 LED-es csíkot vágunk fel. Két LED csík alkot páros és páratlan vonalakat. Helyezze el a szalagot úgy, hogy az egyik szalag LED-je a másik LED-je között helyezkedjen el, de a hátoldalán. A szalag rögzítése után csatlakoztathatja a vezérlőkártya LED-jét. És akkor meg kell egyensúlyoznia a teljes szerelvényt.
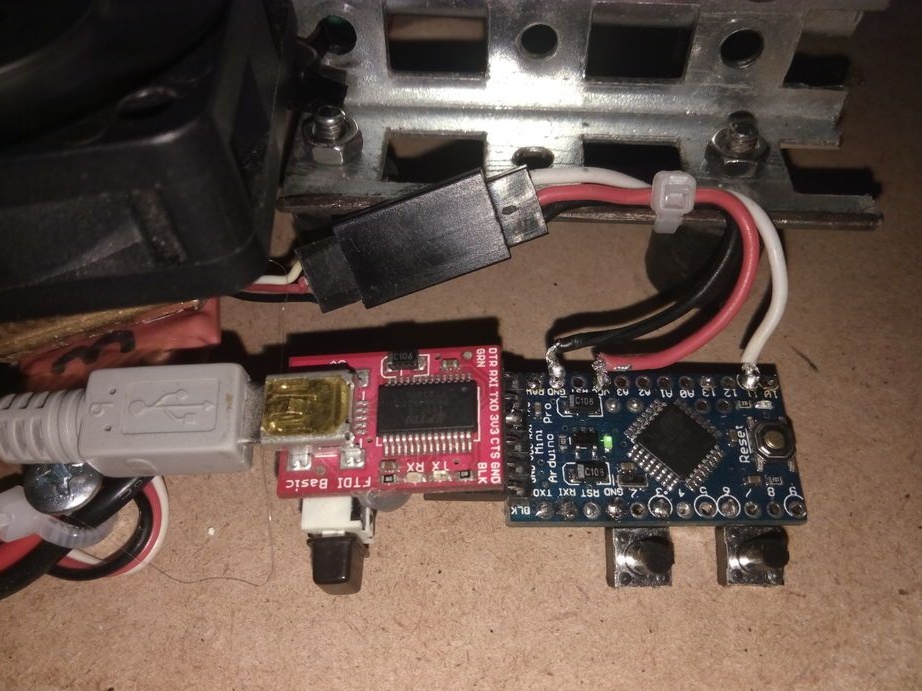
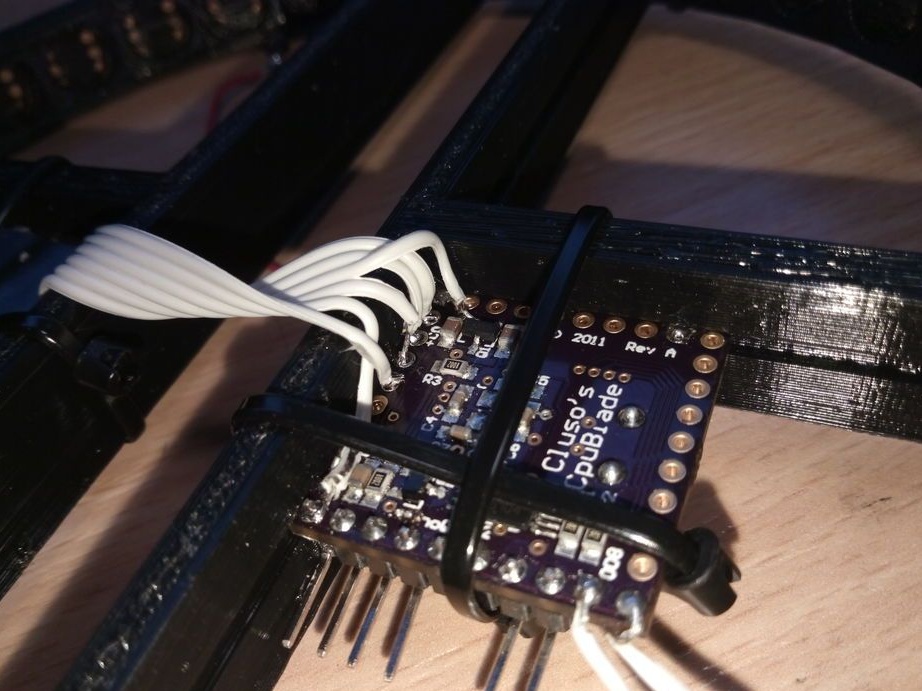
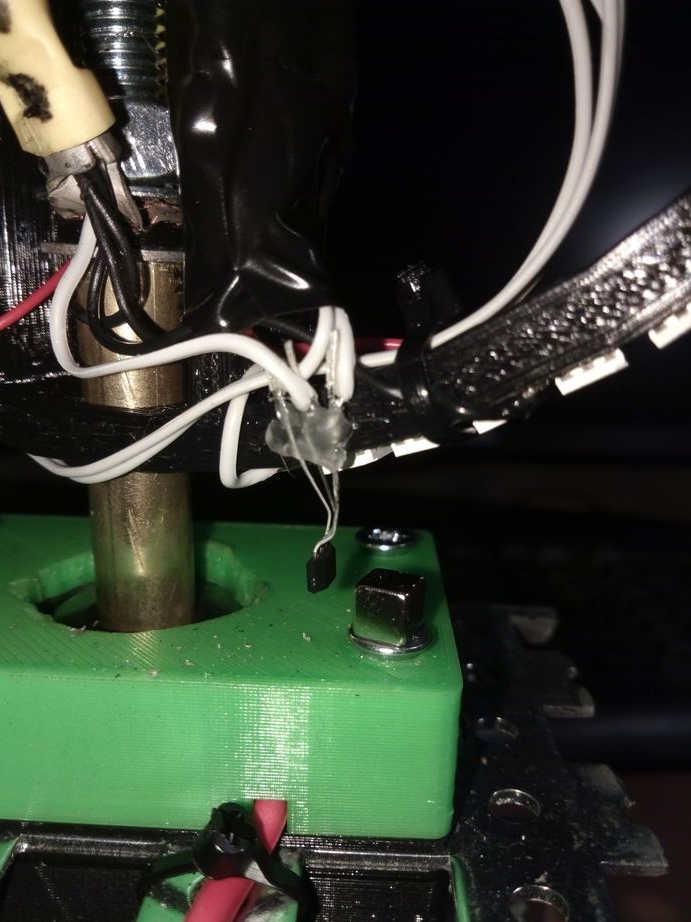
A következő képek bemutatják, hogyan lehet az eszköz összes alkatrészét összekapcsolni. A képen a beépített csarnokérzékelő is látható mágnessel.
A Parallax Propeller mikrovezérlő programozásához szüksége van
NE csatlakoztassa a készüléket USB vagy soros porthoz, amíg nem telepítette a szoftvert. További információ a firmware feltöltéséről a Parallax-hoz
A szerző egy régebbi, és ennek megfelelően energiafogyasztás szempontjából kevésbé gazdaságos MCU kártyát használ, mivel nem talál új könyvtárakat az új vezérlő táblákon.
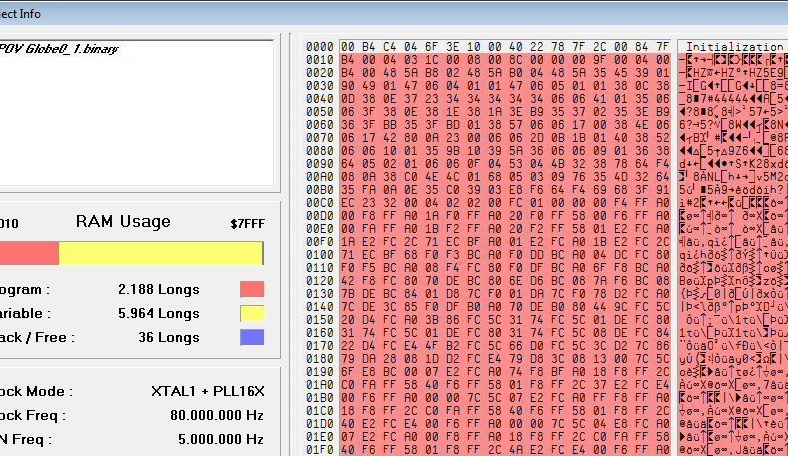
Miután mindent összegyűjtött és csatlakoztatott, meg kell programoznia a vezérlőt. A szerző ezt segítséget nyújt. Fájlok firmware-vel az archívumban.
Most megpróbálhatja elindítani az eszközt. A tesztképet a kezdetektől kezdve másolja az SD-kártyára, és illessze be a nyílásba.
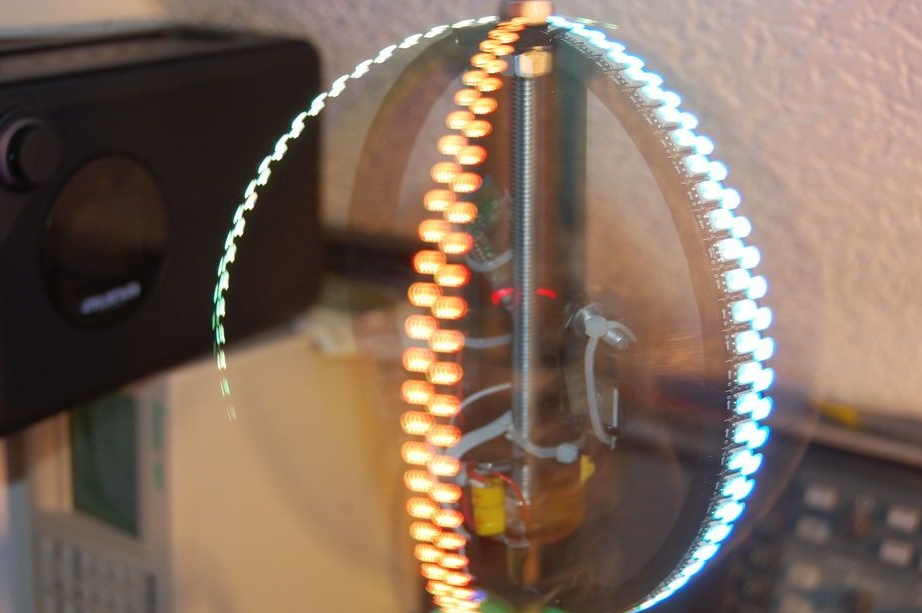
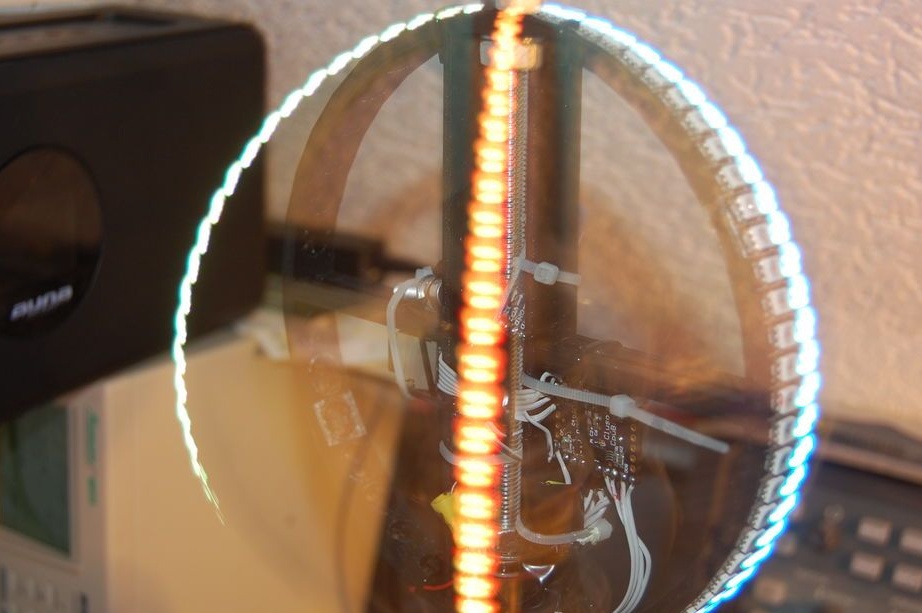
• Ha kézzel forgatja a gyűrűt, akkor a LED-eknek villogniuk kell minden alkalommal, amikor a hallérzékelő áthalad a mágnesen
• Kapcsolja be a motort. Növelve a sebességet a gombokkal, ügyelni kell arra, hogy a LED-ek kigyulladjanak, amint azt a 2 fénykép mutatja
• Csatlakoztassa az Arduino terminált a motorvezérlőhöz.
• Ne feledje a megjelenített értéket.
• Állítsa le a motort
• Írja be a korábban tárolt értéket a változóba „startPos„vázlat POV_MotorControl
• Programozza újra az Arduino-t.
A következő alkalommal, amikor a motor azonnal elindul a megfelelő sebességgel. Most bármilyen képet "kitölthet" a térképen. Ehhez átméreteznie kell a képet 120x64 pixeltel, el kell forgatnia a képet az óramutató járásával ellentétes irányba 90 fokkal, és függőlegesen kell tükröznie. Csökkentse a kép fényerejét, mivel a LED-ek nagyon világosak. Ehhez jobb gamma-korrekciót alkalmazni, amelynek együtthatója 0,45.
Kép mentése BPM-ként 24 bites formátumban tömörítés nélkül. Az összes manipuláció után a kimeneti fájl mérete lesz 23094 byte.



