

Szeretne harcolni a pókrobotok között? Ezután alaposan tanulmányozza ezt a cikket, benne a Mester elmondja neked, hogyan készítsen ilyen pókot. És munkája világossága érdekében nézzük meg a videót.
Szerszámok és anyagok:
A pók számára
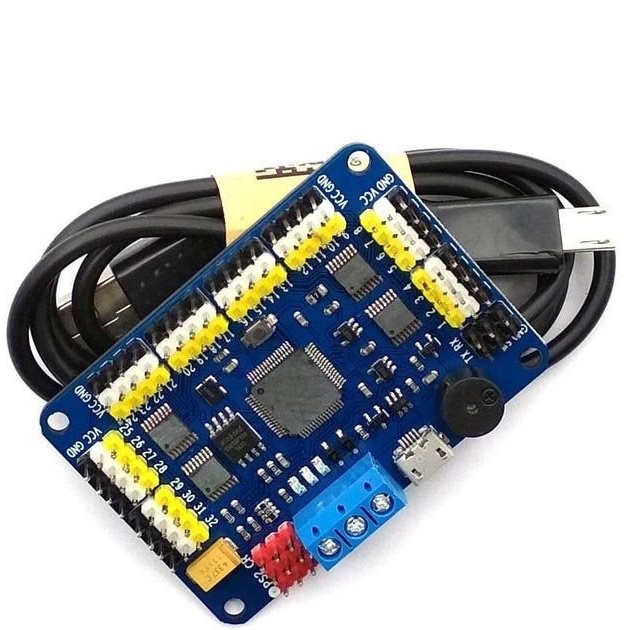
32-csatornás szervovezérlő;
-Wemos D1 Mini vezérlő;
- MG90S szervómeghajtók - 18 db;
-Ubec 6A 5V vezérlő;
- DC-DC Buck konverter;
- Szvetterek;
-Akkumulyator;
A torony számára
-Kettő motor;
-Tápegység modul;
- Süllyesztő átalakító;
-Servoprivod;
-3D nyomtató;
- Ragasztópisztoly;
-Kley;
- csavarhúzó;
-Krepezh;
- Kétoldalas szalag;
-Kusachki;
-Nozh;
-Nadfili;
-Műanyag gömbök;
- Forrasztási kiegészítők;






Első lépés: Alkatrészek nyomtatása
Először ki kell nyomtatnia a test és a lábak részleteit egy 3D nyomtatóra. A fájlokat letöltheti nyomtatás céljából a link.


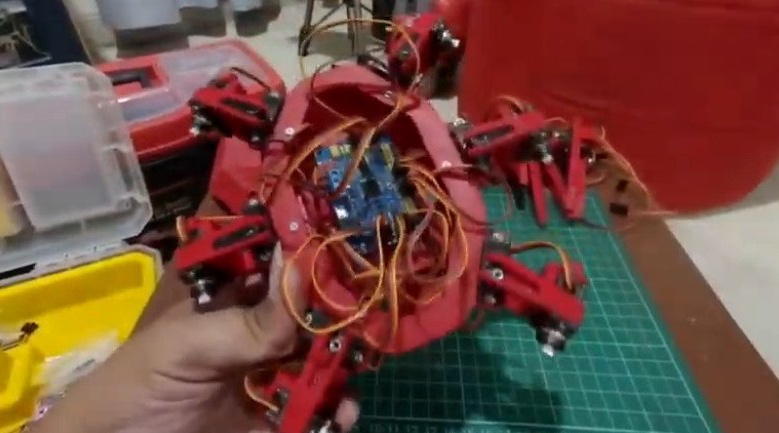
Második lépés: Építsd
Most össze kell gyűjtenie a robopaukot.
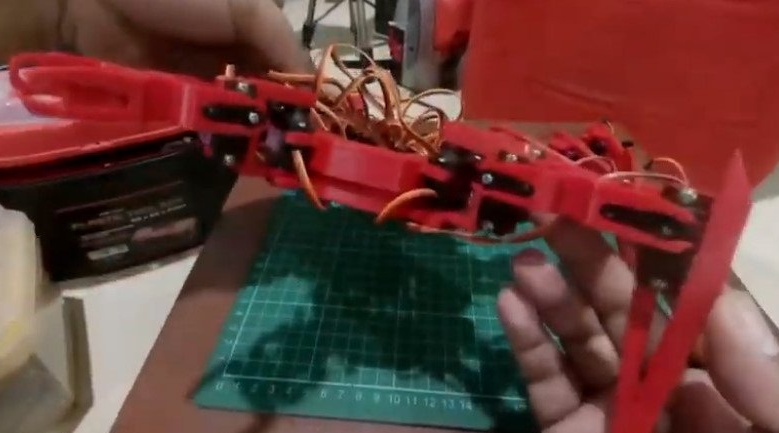
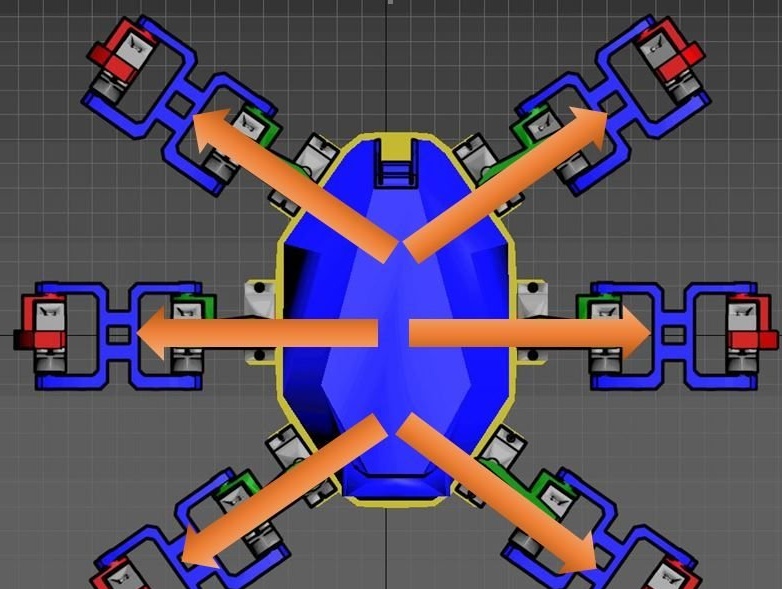
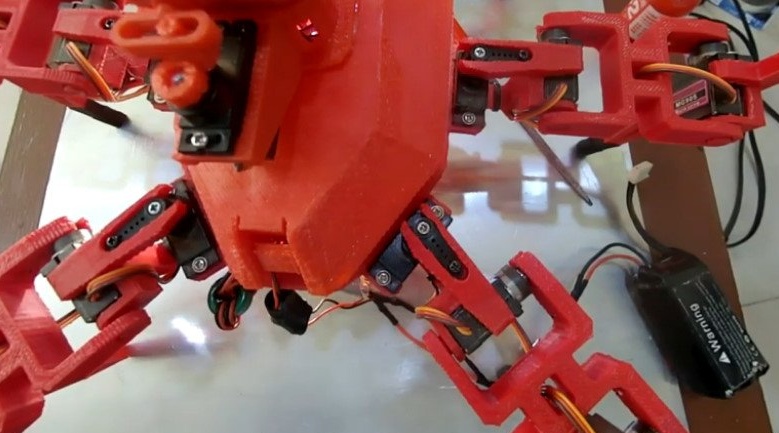
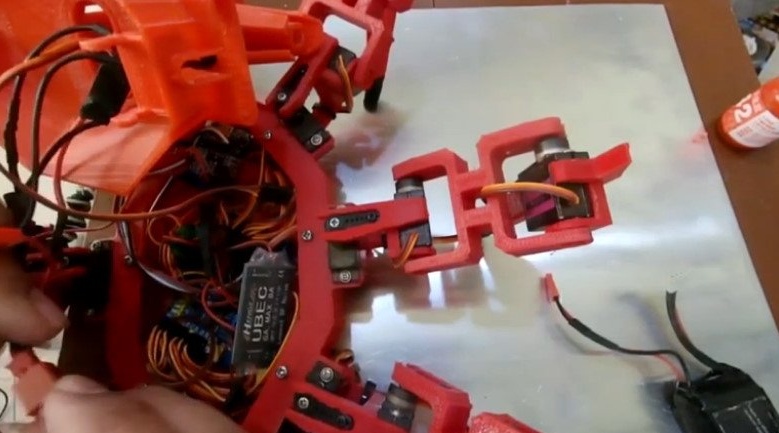
A mester szervoszt telepít a pók lábainak ízületeire. Összességében a robotnak hat lába van és mindegyik lábán három szervó van.








Telepíti a szervókat az alvázra.




Rögzíti a lábak első ízületeit a peronos szervóhoz.




A vezetékeket behúzzák a technológiai lyukakba és csatlakoztatják a vezérlőhöz.





Telepíti a csíkokat.


Megalapítja a lábak második ízületeit. Összekapcsolja a vezetékeket a szervosztól a vezérlőhöz.






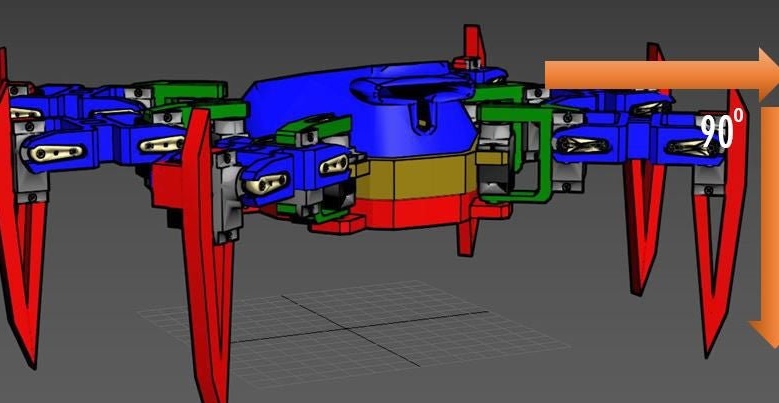
Telepíti a harmadik ízületet. Ezzel a csuklóval a pók mozogva a felülethez fog állni.



Csatlakoztatja és ellenőrzi az egyes szervohajtók működését.



Ha általában minden rögzíti a vezetékeket kötésekkel, behelyezi az akkumulátort és bezárja a fedelet.



Az összeállítási folyamat látható a videóban.
Harmadik lépés: Körülbelül elektronika
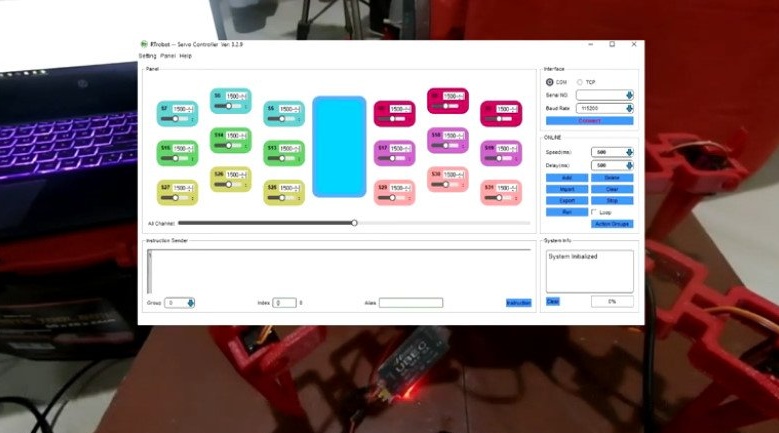
A varázsló az RTrobot szervóvezérlőt használta a mozgások vezérlésére. A menedzsment program letölthető itt vagy itt.
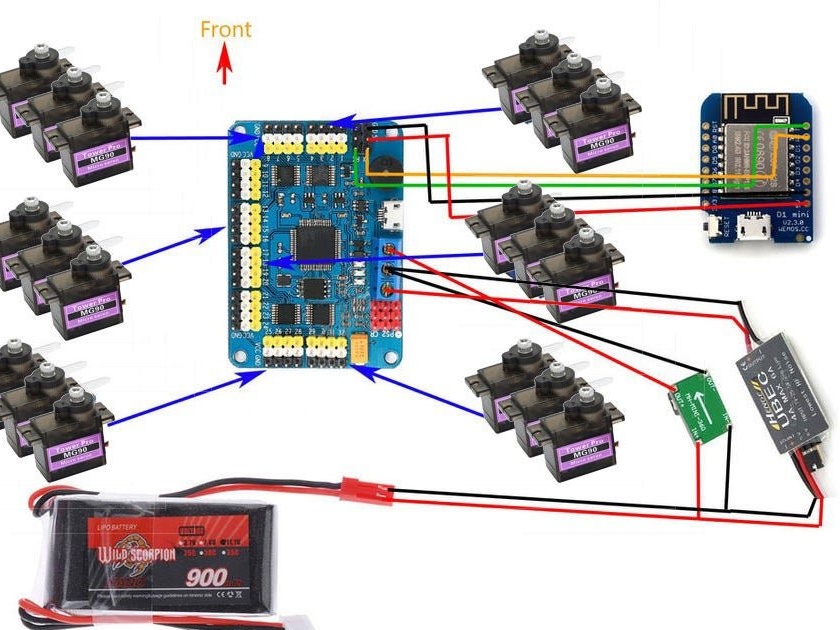
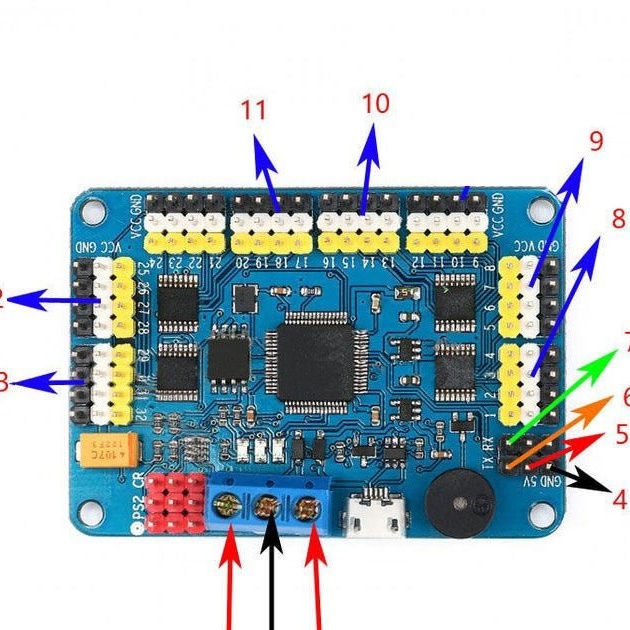
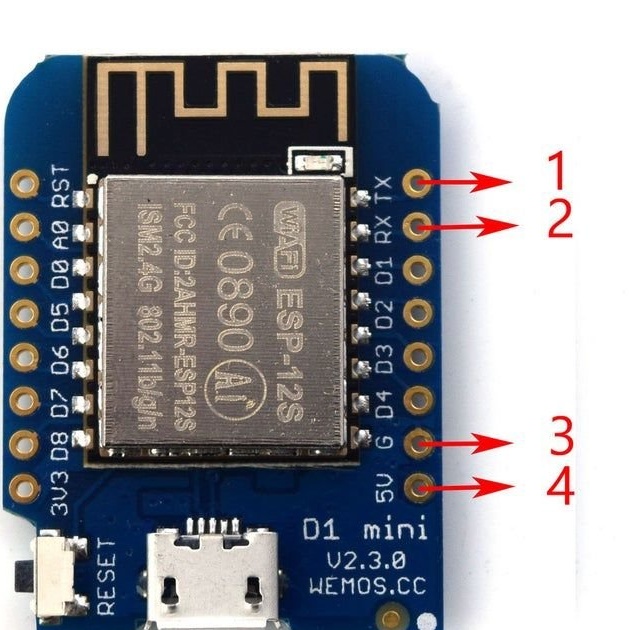
Minden a következőképpen kapcsolódik:
1. 5 V (+) UBEC kimenet
2. Föld az UBEC-ből és a buck-átalakítóból
3. 5 V tápegység (+) a konverterről
4.a Wemos D1 mini G tűn
5. a Wemos 5v-ig
6. a Wemos D1 RX-hez
7. Wemos TX
A szervóhajtásokat a 8–13 érintkezőkhöz kell csatlakoztatni.
Telepítse a kódot a NodeMCU-ra. Letöltheti itt.
A WeMos D1 mini az ESP8266 minimum Wi-Fi kártya.
A wemos D1 mini WIFI hozzáférési pontként történő felhasználásával soros parancsot küldhet a szervovezérlőnek. Csak annyit kell tennie, hogy egyszerűen villog a nodeMCU fórum kóddal, és csatlakoztathatja az okostelefont a nodeMCU AP-hez. Ezután egy böngészővel lépjen a http://192.168.4.1 webhelyre.
Fontos.
a szervó bekapcsolásakor az összes szervó az eredeti / normál helyzetbe kerül
telepítse a szervókat a lehető legpontosabban, amint az a fenti ábrán vagy a videóban látható
állítsa be az ízületek helyzetét, kapcsolja ki és újra a készüléket, hogy megbizonyosodjon arról, hogy az összes láb a megfelelő helyzetben van-e
Ha az ízületek tapadnak, dörzsölje le, állítsa be a helyzetet.
Negyedik lépés: A torony
Most a torony összeszerelésével foglalkozunk.
Először ki kell nyomtatni a torony részleteit. Erről fájlokat tölthet le a link.
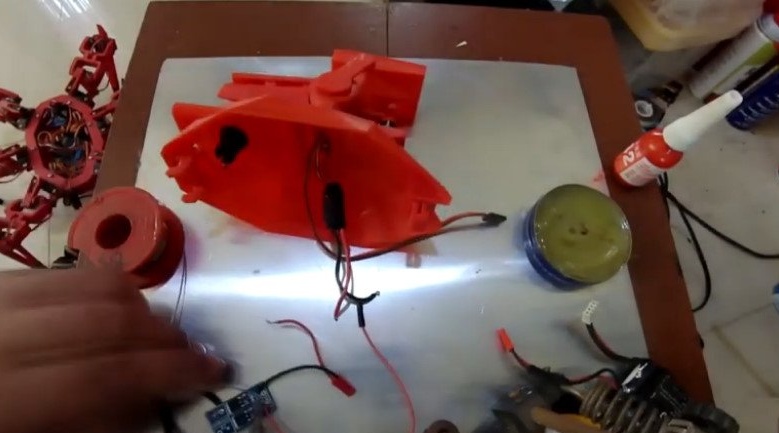
Ezután a mester folytatja a torony összeszerelését. A torony elfordításának és az elektromos alkatrészek csatlakoztatásának áramköre az alábbiakban található.
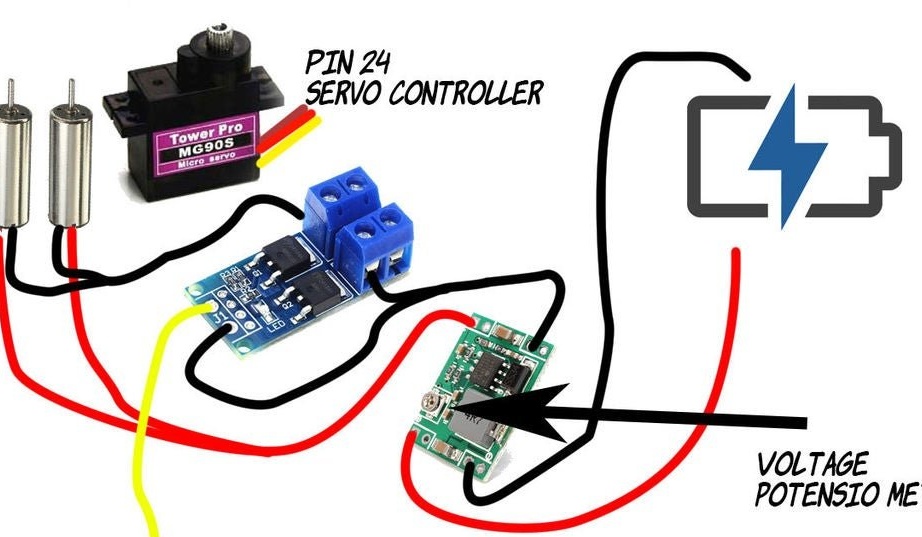
Telepít egy szervót a toronyra.







Kétoldalas szalag ragaszkodik a hengerekhez.


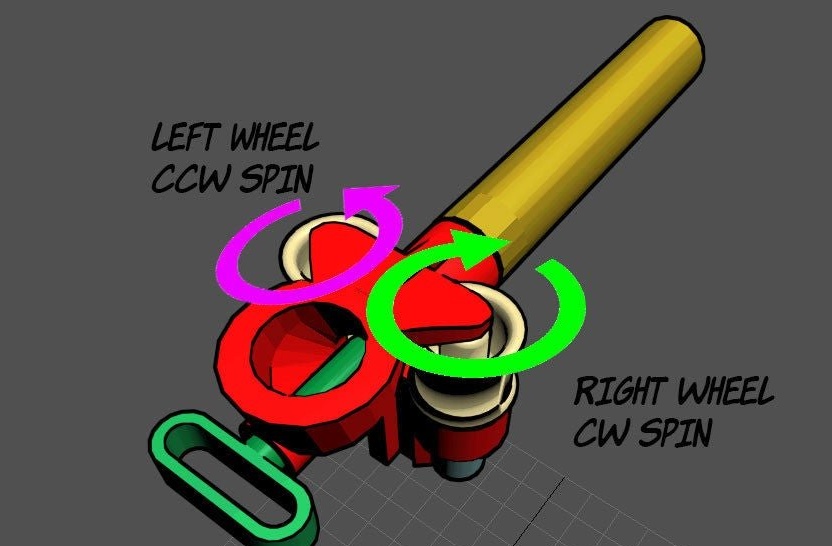
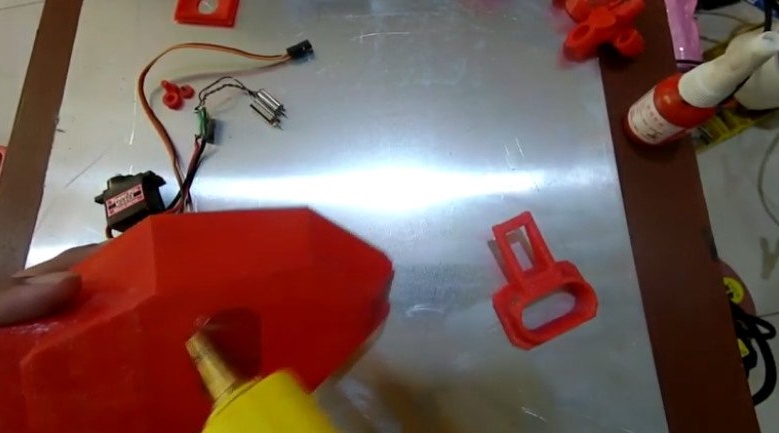
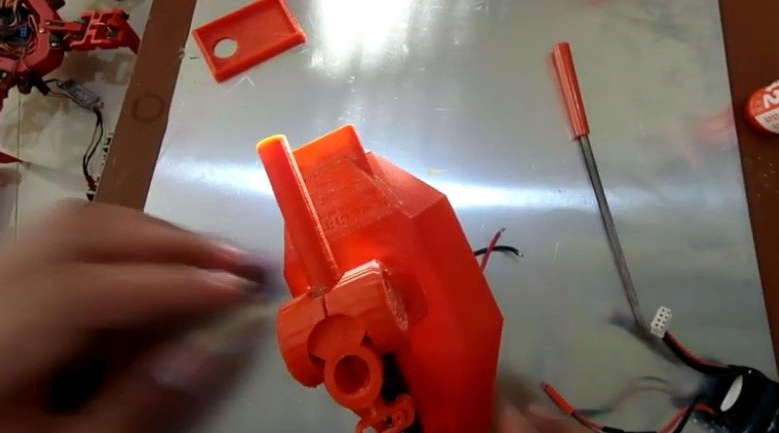
Fegyvert gyűjt. Beépíti a motorokat a tartóba. Szereljen be görgőket a motor tengelyére.








Összekapcsolja a vezetékeket és összegyűjti a tornyot.




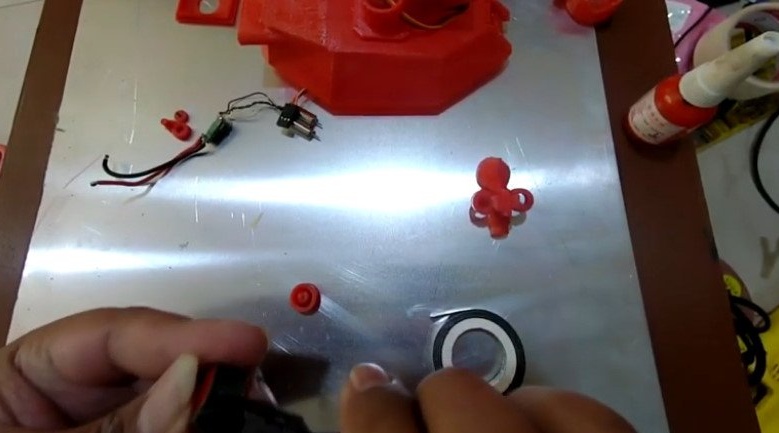
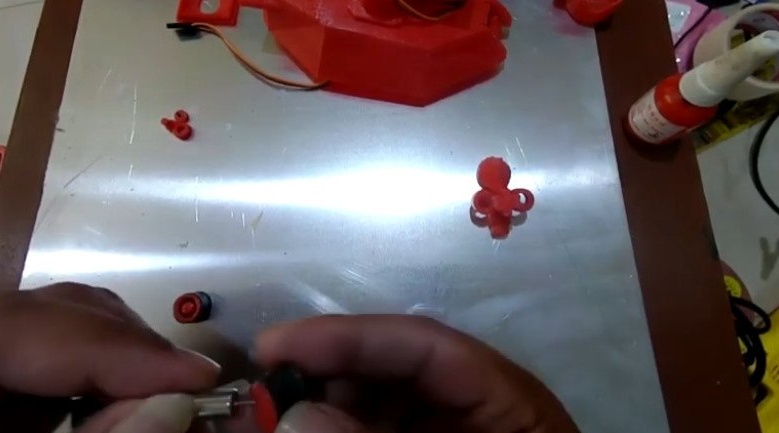
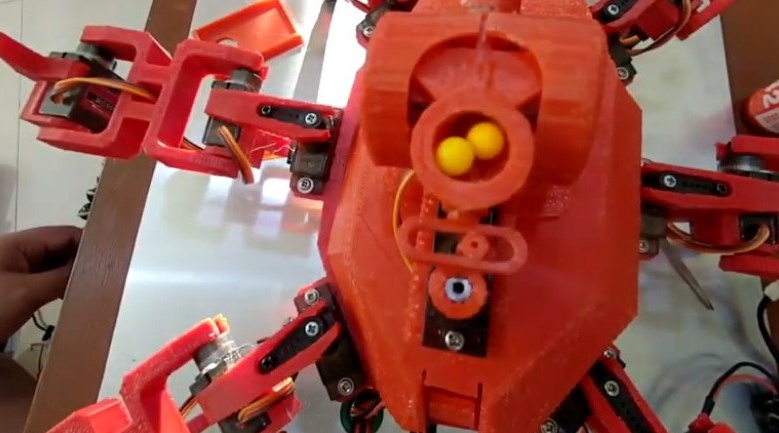
Betölti a kagylókat és ellenőrzi a pisztoly működését. A mechanizmus úgy állítható be, hogy a tartót a szervótengelyen mozgatja.


Ez elvégzi a végső csatlakoztatást, összeszerelést és ellenőrzést.




A torony összeszerelésével kapcsolatos videó alább látható.
Minden kész. Gyűjtsön össze még egy ilyen robopaukot, és megszervezheti a harcot.
