

A szerző ezt a projektet egy egyszerűbb verzióra alapozta. házi csónakot, és tökéletesítette. Az érzékelőket a hajóba helyezik az akadályok elkerülése és a fénybe történő bejutás érdekében. A hajó vezérlőjének használata Arduino, elõre egy ultrahangos érzékelõ van felszerelve, az oldalán pedig a fényérzékelõk vannak. Ez az egyszerű csónak nem ütközik a falakba, és egy zseblámpával vezérelhető.
Anyagok és eszközök:
- Szigetelő szalag / ragasztószalag
- Hőnedves forró ragasztóval
- DC motorok 2 db
- Műanyag palackok 2 db
- vezetékek
- 2 darab kis hajtócsavar
- Arduino, számítógép és USB kábel
- Műanyag doboz
- 9 V-os elem és csatlakozó
- Teljesítménydiódák (1N4004 típus)
- Ellenállások
- MOSFET vagy TIP 120 tranzisztor
- Két fotocella és két gomb
- olló
- Forrasztópáka

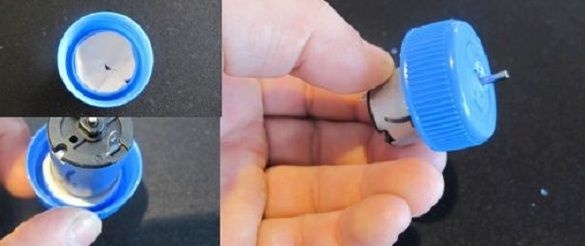
1. lépés: Motorok telepítése.
A palackok fedeleit eltávolítják, és mindegyikben lyukat készítenek. A borító belsejében a szerző forró ragasztót szorít anélkül, hogy a lyukakat bezárná. Helyezte a motor tengelyét a lyukba, és rátette a ragasztóra. Miután a ragasztó megszárad, a tengely szabadon forog. Ugyanez az eljárás történik a második fedélnél.
2. lépés: A palackok rögzítése.
A palackokat tutaj elvén rögzítették három ragasztószalag segítségével.

3. lépés. Forrasztás a motorokhoz.
Mivel a dugókba szerelt motorok nem tartalmaztak vezetékeket, meg kell forrasztani őket, a huzalok hossza körülbelül 25-30 cm volt.

4. lépés. Vágja be az üvegeket.
Annak érdekében, hogy a huzalok beleesjenek a hajó testébe, a felső oldalukról egy kis rést készítenek.

5. lépés: A motorok rögzítése.
Ezenkívül a szerző csavarja a palackok fedeleit, mivel ezek nem csavarodtak jól, forró ragasztót kellett használni. A vezetékeket átvezetik a palackok előkészített lyukain.

6. lépés.
Egy műanyag doboz két üveghez ragaszkodik. Ebben az elektronikai kapacitásban lyukakat készíthet a vezetékek számára, vagy vezetékeket húzhat a doboz hátulján. A palackok huzalának furatait meleg olvadékragasztóval szigeteljük.

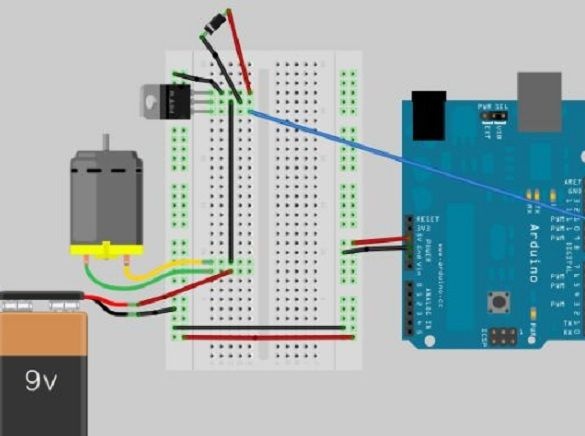
7. lépés. Bekötési rajz.
Az áramkör kapcsolóként TIP 120 tranzisztort használ (hasonló MOSFET vagy Darlington tranzisztorokat is használhat). Arra szolgál, hogy nagy mennyiségű áram fogyasztása esetén kapcsolja be a terhelést, mivel az Arduino-nak nincs elegendő energiája a motorok számára. Ezt az áramkört az első, majd a második motorhoz szereljük össze (a második motorhoz nincs szükség további elemre).
8. lépés. Érzékelők.
Az ultrahangos érzékelő kiválóan alkalmas a hajó elejére, figyelmezteti az úton lévő akadályokat. A fotocellák úgy viselkednek, mint az antennák, és arra használják, hogy a hajó lebegjen a fénybe.Az oldalak gombjai akadályérzékelőkként használhatók. A kódot módosíthatja, és használhat más érzékelőket is, például infravörös.

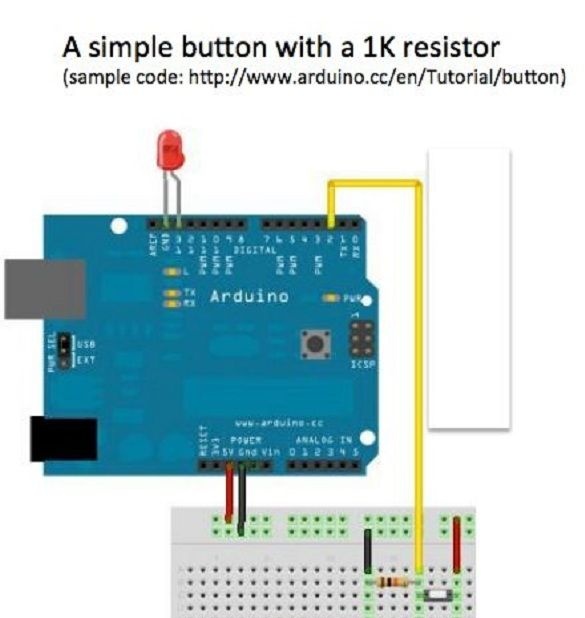
9. lépés: Az érzékelők sémái.
Az ábra egy egyszerű gomb és egy 1K ellenállás csatlakoztatását mutatja. Mindkét gomb sémáját megismételjük, a gombokat a hajó mindkét oldalára helyezzük. Ők felelősek a csónak mozgásának ütközéses megváltoztatásáért.
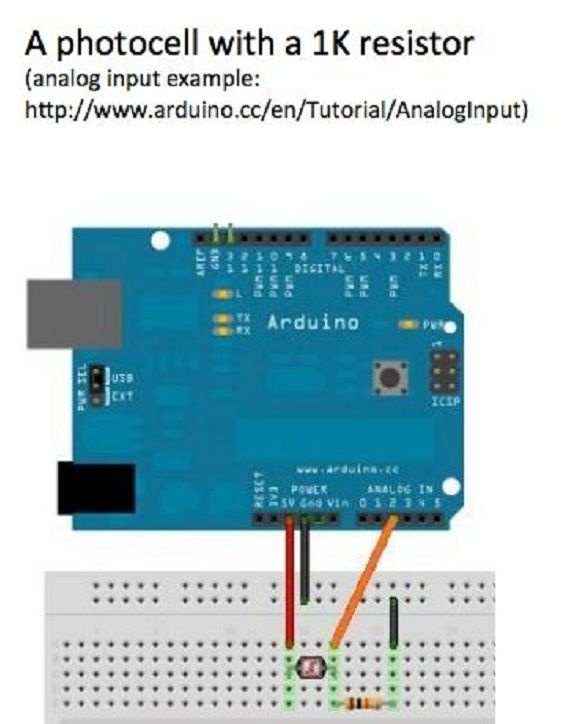
Az alábbi ábra egy 1K ellenállású és fotocellás áramkört ábrázol. A szerző kétszer végezte el, és a fotocellákat a hajó másik oldalára helyezte.
10. lépés. Programkód.
A szerző lehetőséget biztosított a kód letöltésére felhasználás céljából, ezáltal alapvető funkcionalitást biztosítva azok számára, akik ilyen hajót szerelnek fel. A kód támogatja a fotocellákat, a távolságmérőt és a gombokat. A hajó megpróbálja elkerülni az akadályokat önmagában, és ellenkező irányba fordul, amikor oldalról akadályokat talál. Ha nem kívánja használni a teljes érzékelőkészletet, de csak néhánynak van kódja mindegyikhez külön. Az összes kódot a cikk alatt letöltheti.
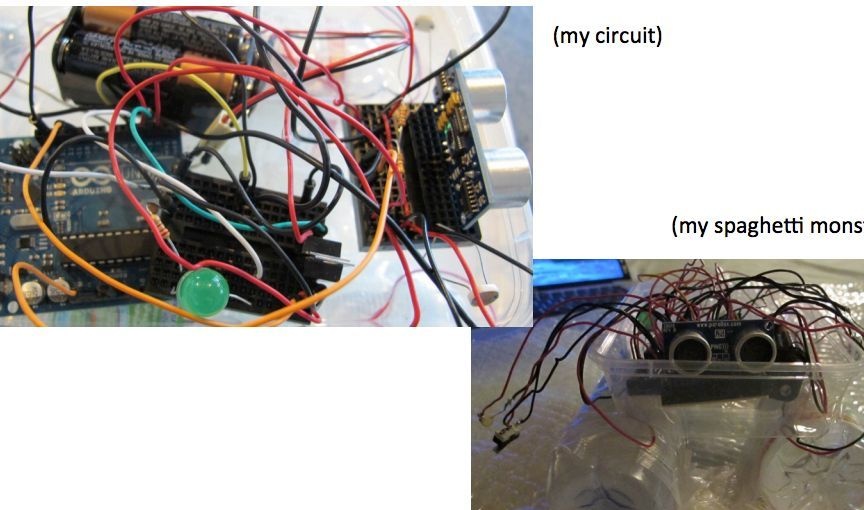
11. lépés: A hajó összeszerelése.
Az összeszerelt áramkör, az Arduino és az akkumulátorok dobozban vannak.
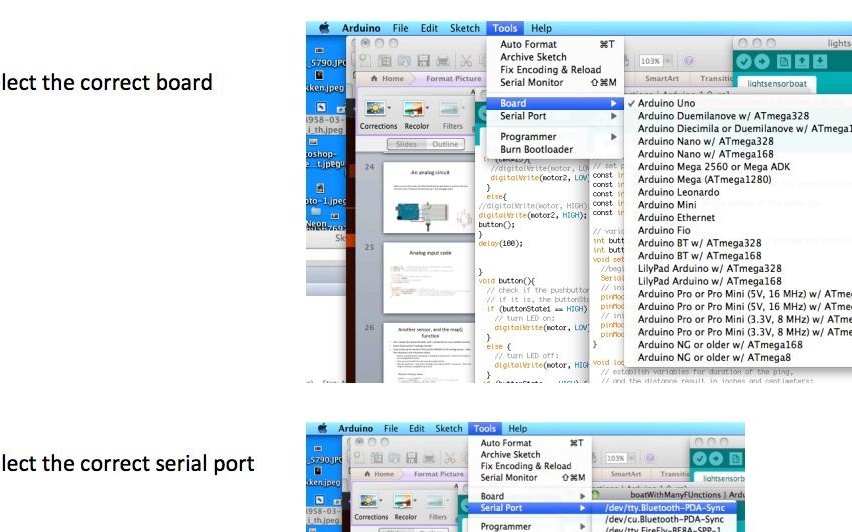
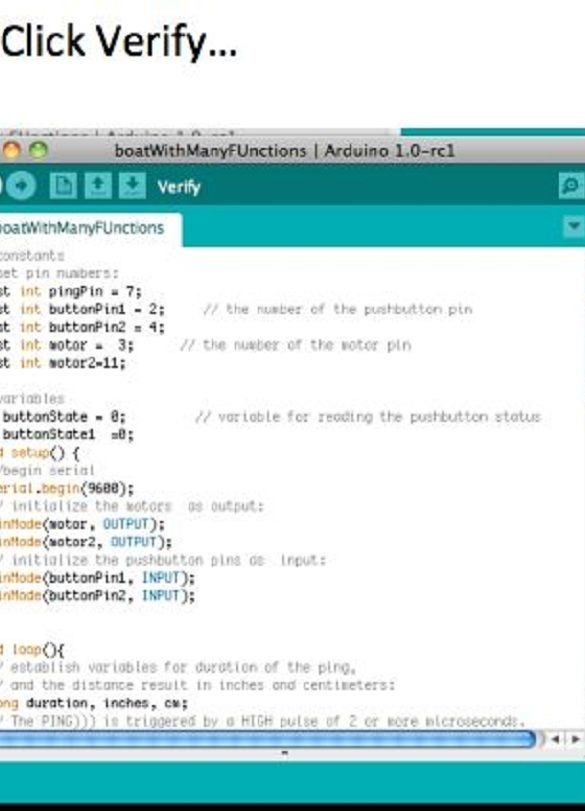
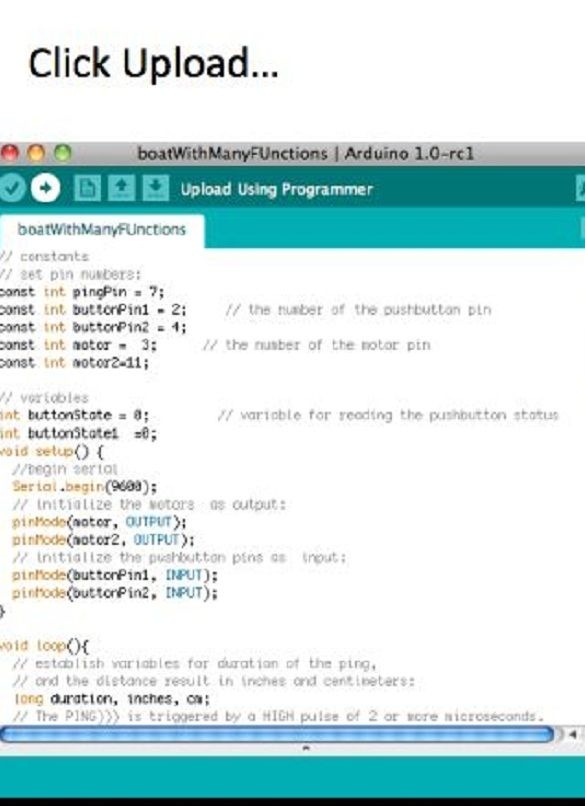
12. lépés. Töltse le a vázlatot.
Ezután megnyílik az Arduino IDE, amely kiválasztja a megfelelő fájlt és portot, majd a szerző összeállította és feltöltötte a kódot a vezérlőbe.
13. lépés: Vízálló és tesztelje.
A szerző emellett minden lehetséges vízbejutási helyet forró ragasztóval elkülönített. Az összes vezetéket rövidzárlatból is szigeteltesse. Az Arduino-t tartalmazó tartályt ugyanabban a dobozban fedjük le, és elektromos szalaggal lezárjuk. A motorokhoz légcsavarok vannak rögzítve. Itt van a hajó készen áll, most elkezdheti a vízen történő tesztelést.



Videó a hajó előzetes tesztelésével: