



Ez a cikk ismerteti, hogyan kell elkészíteni csináld magad robot művész. Természetesen van ilyen képe a robot nem fog rajzolni, hanem meglepni ismerőseit vagy barátait vele Homebrew gally ez lehetséges. És ha gyermekeivel ilyen robotot gyűjt, akkor ez kétségtelenül elősegíti a kreatív jellegzetességek fejlődését.
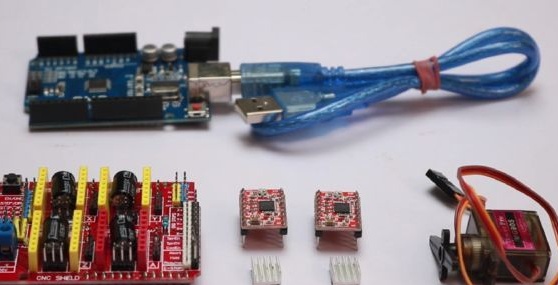
Szerszámok és anyagok:
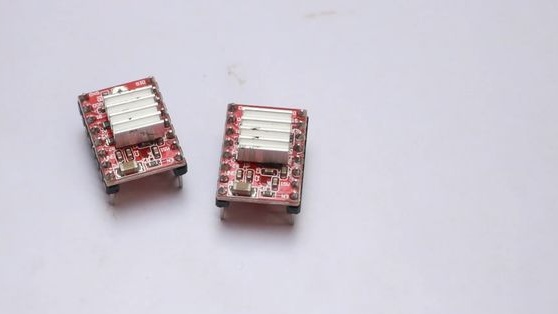
-Két LED meghajtó;
-Lap 3 mm;
-Pila;
-Kley;
-
-
-
-
-
-Számítógép;
- csavarhúzó;
- Forrasztópáka:
-Smazka:
-Lineyka;
-Karandash;
-Drel;
- Ragasztópisztoly;
- Író toll;
- olló;
-Pruzhina;
-Nitka;
- 12 V akkumulátor;
seeing-;
Első lépés: LED-meghajtók
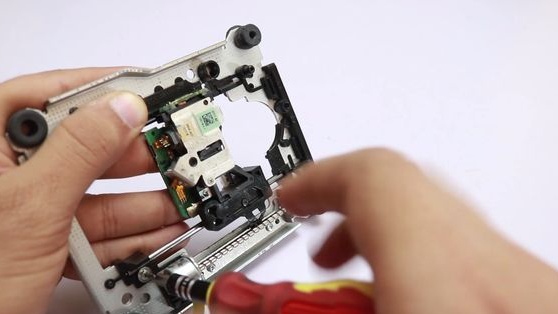
Elemezi a CD-meghajtókat. Távolítsa el a borításokat, az elektronikai táblákat.

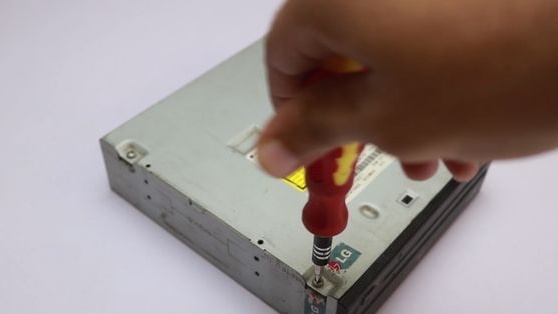



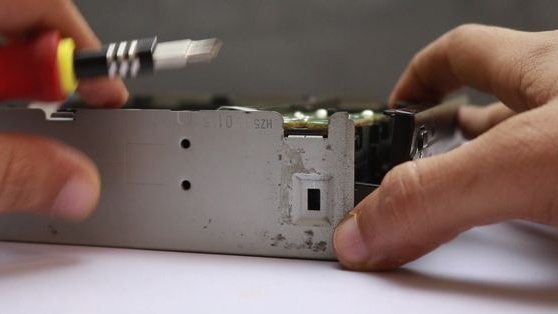

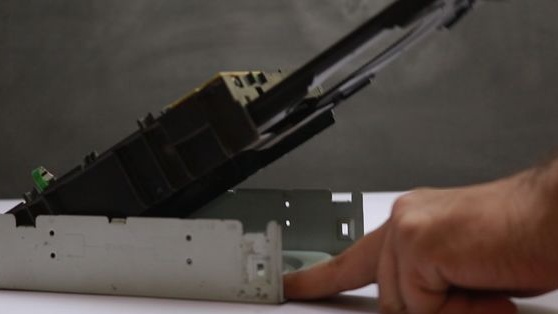
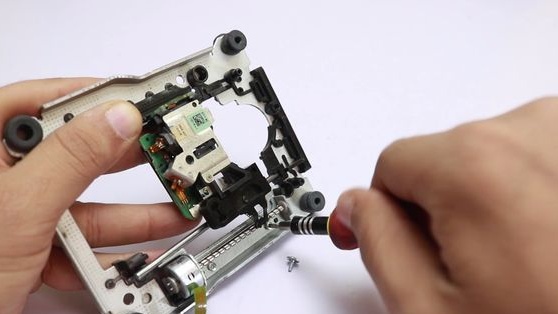
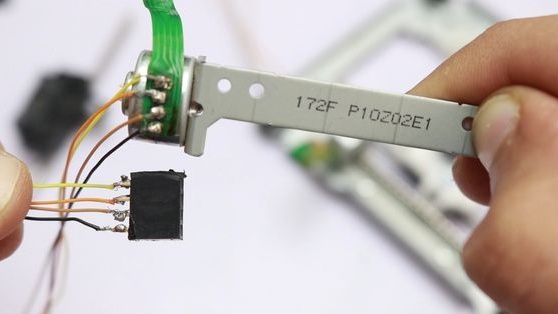
Távolítsa el a kocsiból és a lépcsõmotorból álló keretet a házból.
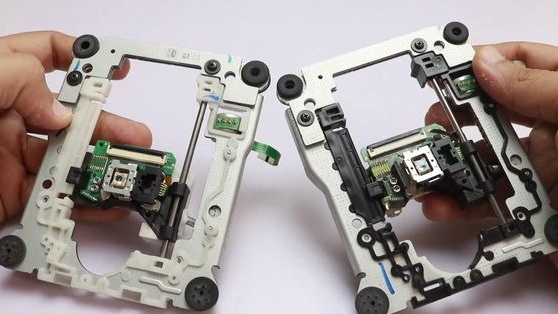
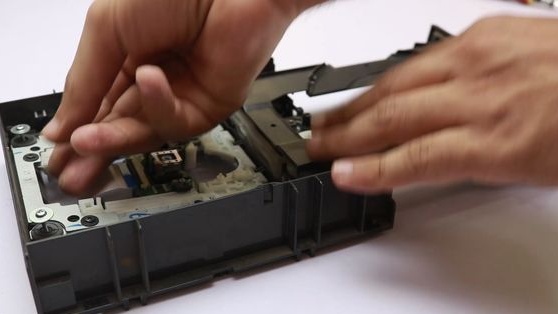
Fektet az egyik keretet, a második elemzi.
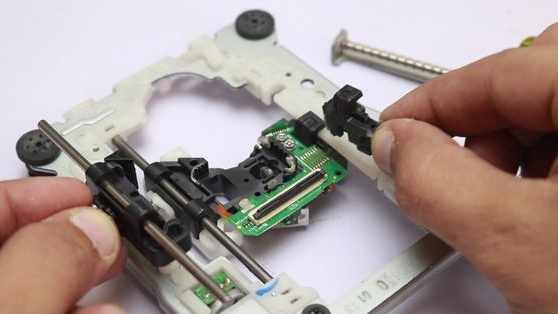
A második CD-meghajtótól csak kocsira és léptetőmotorra van szükség.


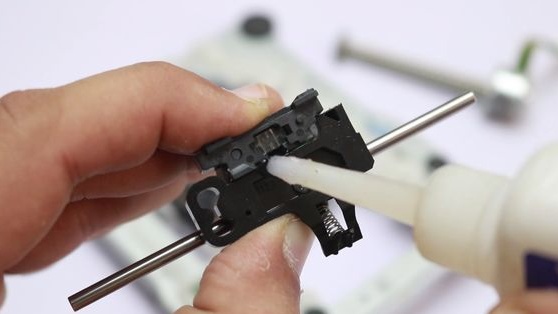
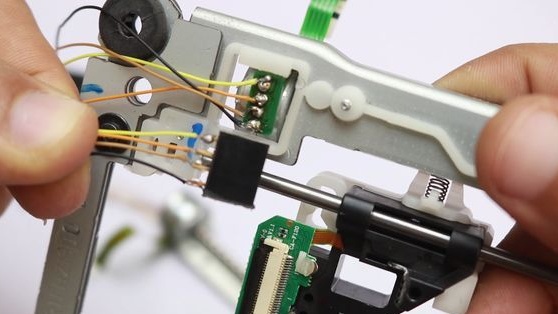
Kenje a kocsit.
Forrasztók a léptetőmotorok huzalozásához. A csatlakozó meg van forrasztva a vezetékek második végéhez.
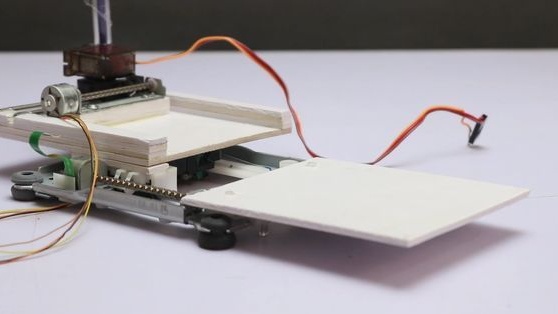
Második lépés: X tengely és Y tengely
Fűrészeljen le egy deszkát (az asztal mellett) 10 * 9 cm-rel, az asztal széleinél ragasztja a rudakat 2 * 10 cm-re.
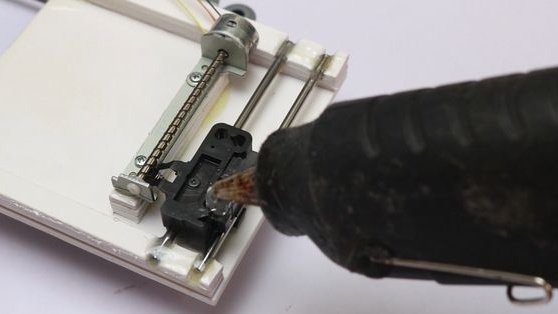
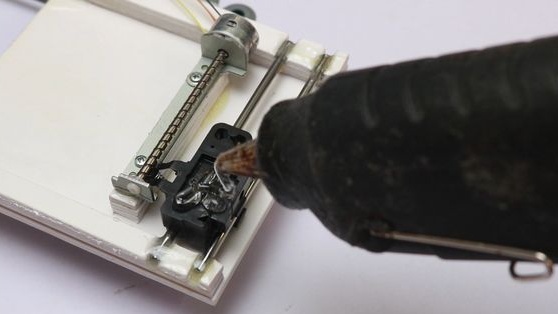
Vágott hornyok a kocsivezetőkhöz. Ragasztja a vezetőket.

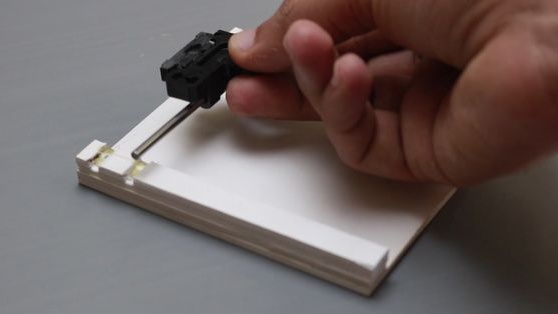
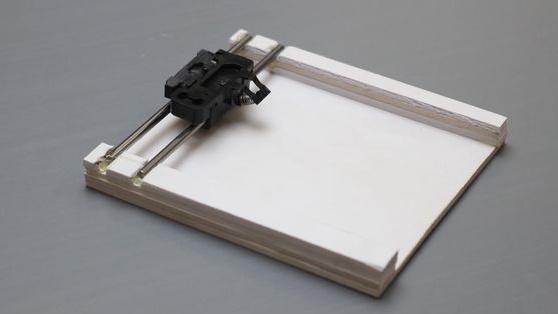
A kocsi mellett 3 * 5 cm-es tömb ragasztódik. Csavarok a léptetőmotorra. Az X tengely kész.
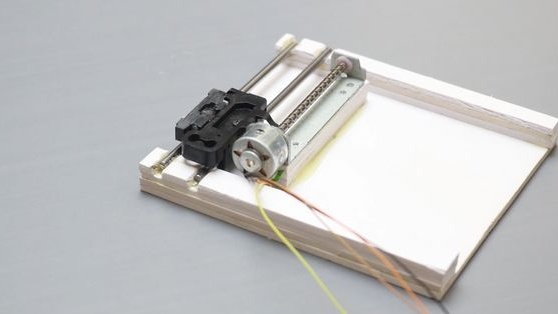
Ragasztja az X tengely mechanizmust az Y tengely mechanizmussal.

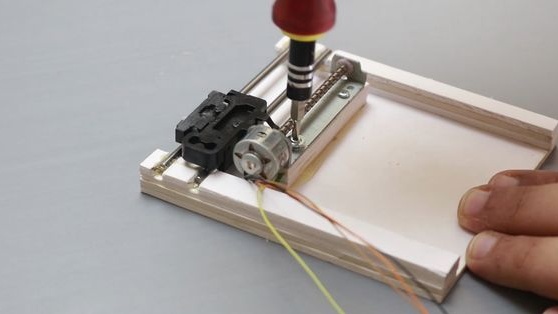
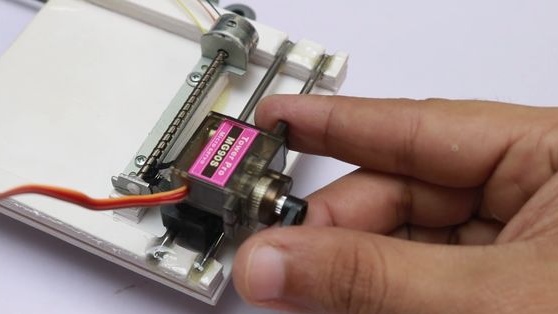
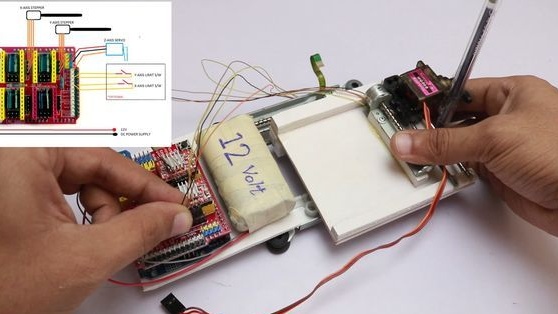
Rögzíti a szervohajtást a kocsihoz, a tengely kifelé (lásd a fényképet)
Harmadik lépés: Toll
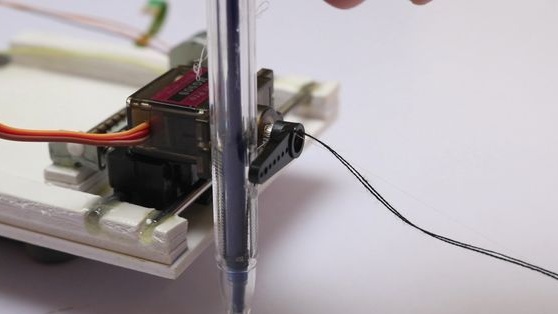
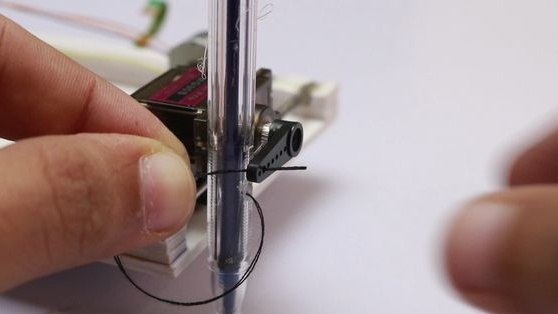
Elemez egy tollat. 1 cm vágás a tengely felső végén. A rugó felét elfordítja a rúdon. Körülbelül 1 cm távolságra húzva a rúd alját, tekerje rá a szálat. Kapcsolatokat. A fogantyúban lyukat készít. Húzza a szálat a lyukba. Helyezze be a rudat a helyére. Beállítja a kupakot.






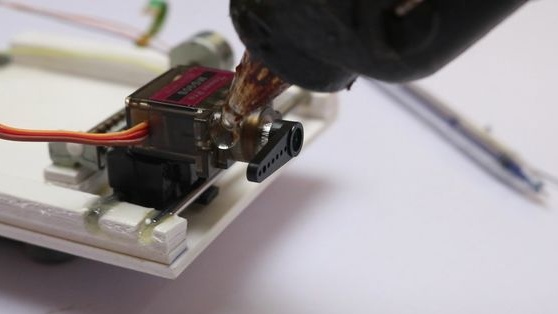
Ragasztja a fogantyút a szervomotor testéhez (a rúd gömbje a felülethez támaszkodik). Rögzíti a menet második végét a szervókarhoz.
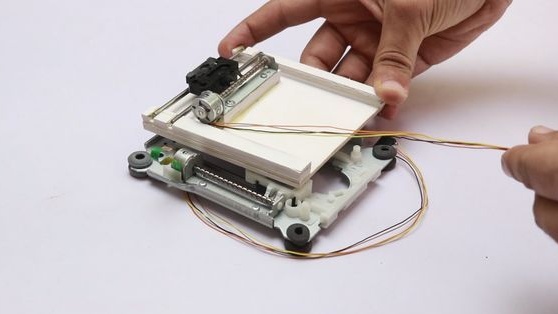
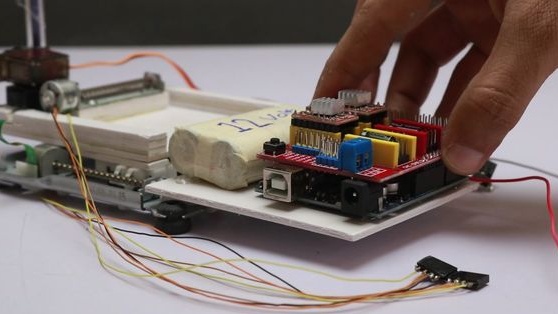
Negyedik lépés: A modul összeszerelése
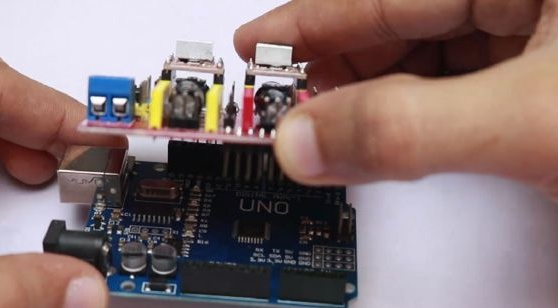
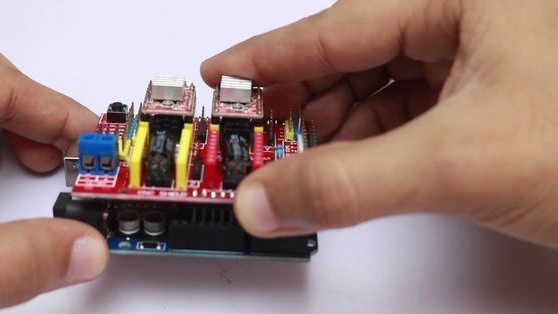
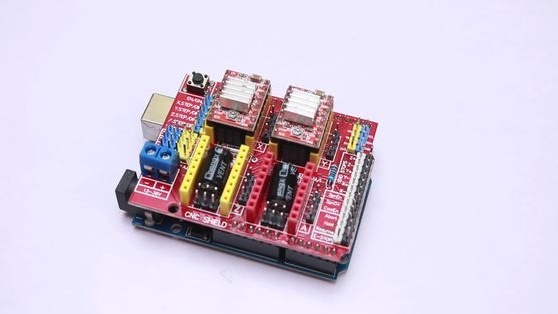
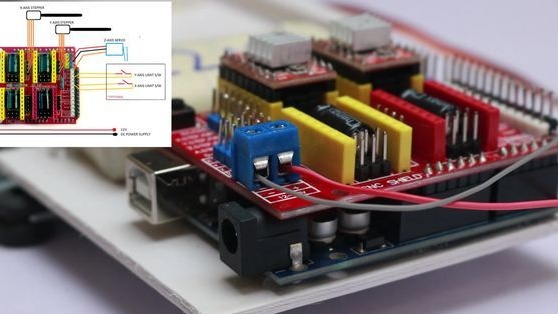
Két lépcsős motormodult telepít radiátorokkal a bővítőlapra.
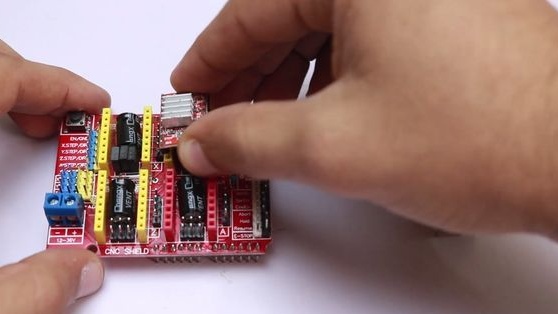
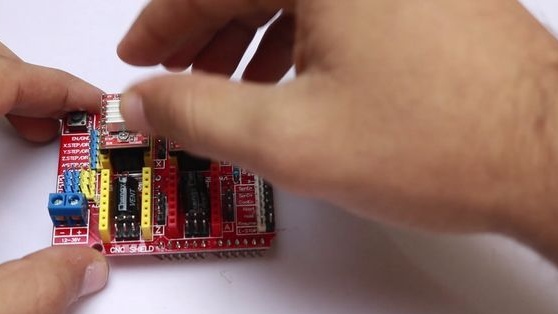
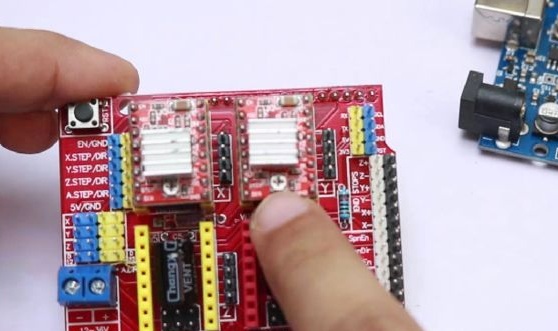
Telepít egy bővítő kártyát Arduino.
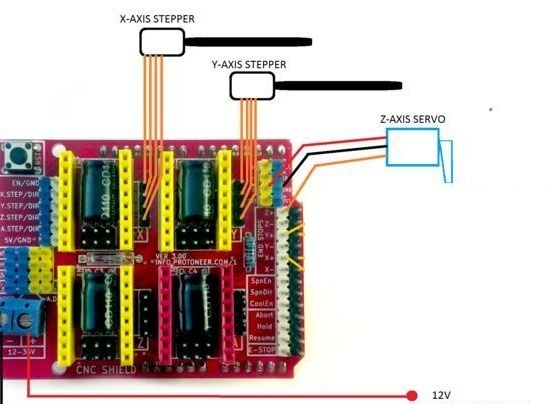
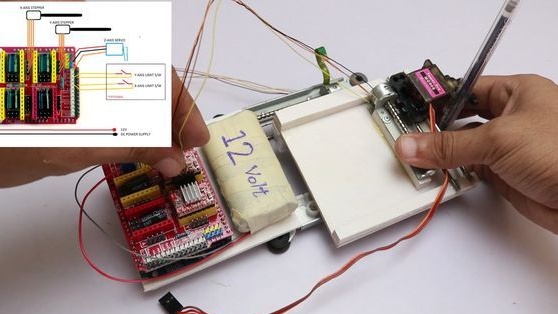
Öt lépés: Csatlakozás
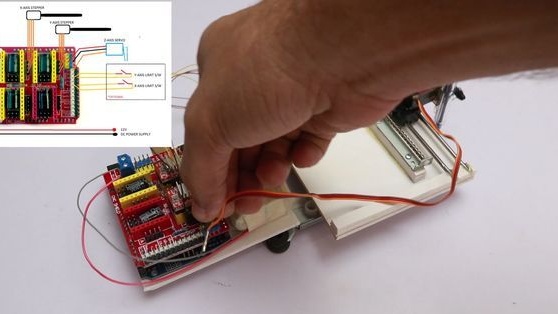
Telepít akkumulátort. Rögzíti és összeköti az összes elemet az adott séma szerint.
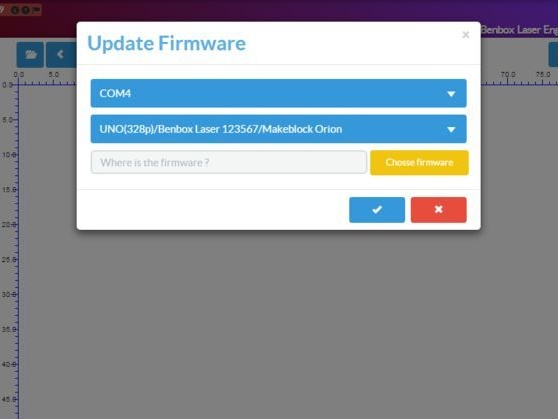
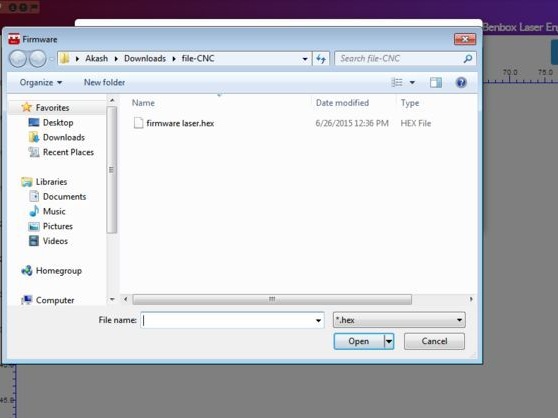
Hatodik lépés: szoftver
Betölti a szoftvert. Megnyitja a szoftvert. Arduino USB-csatlakozót csatlakoztat. A firmware frissítésekor válassza a COM (3.4 vagy 5) lehetőséget.
Beállítja a paramétereket.
Első oldal:
Soros port: COM (3.4 vagy 5)
Toll fel: 35
Toll le: 22
Sebesség: 800 (növelheti)
Idő: 200
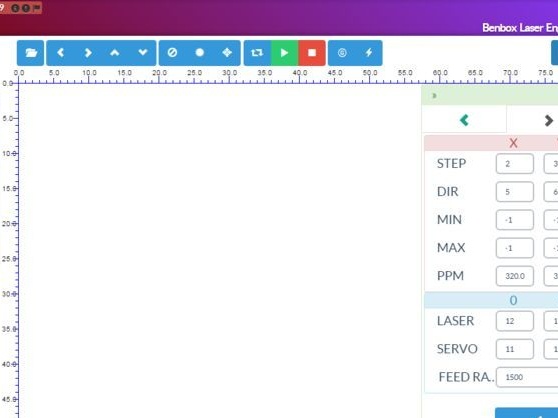
Második oldal:
Lépés: x = 2 y = 3
Dir: x = 5 y = 6
Min: x = -1 y = -1
Max: x = -1 y = -1
Ppm: x = 320 y = 320
lézer: 0 = 12 1 = 12
Szervo: 0 = 11 0 = 12
Feed Ra. : 1500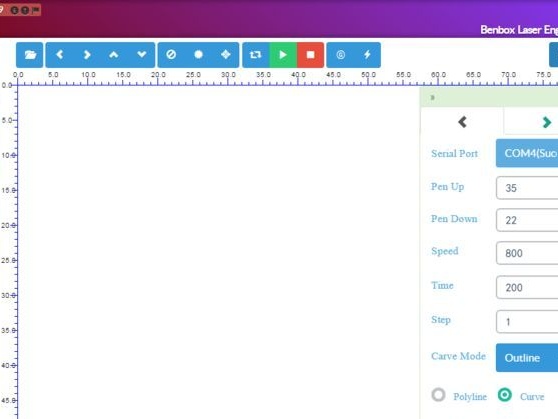
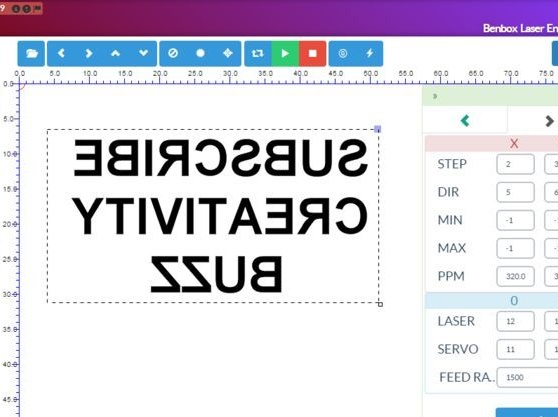
A robotművész készen áll. A szöveg beírása a mezőbe és a program futtatása marad.
A robotművész létrehozásának teljes folyamata látható a videóban.