







A projekt fő koncepciója az, hogy különféle agyhullámok segítségével a felhasználó képes lesz irányítani a robotot, a kurzort a számítógépen, vagy bekapcsolni / kikapcsolni otthona fényét, miközben a mikrovezérlő (Particle Photon) online elemzést készít a felhasználó agyhullámairól. Tehát igen, ezzel az eszközzel valóban használhatja a Gondolat erejét
 ... Ezt az eszközt nemcsak lustáknak vagy rajongóknak szánják, hanem azért hozták létre, hogy lehetőséget biztosítson az embereknek. akik minden nap küzdenek fogyatékosságuk miatt. A robota szerző által kifejlesztett, ugyanúgy működik, mint a kerekes székrendszer otthon az automatizálás segíti a felhasználót a fény vagy a televízió irányításában, még akkor is, ha nem tud mozogni. A PC-vezérlő mód hasznos lehet még azok számára is, akik egészségesek.
... Ezt az eszközt nemcsak lustáknak vagy rajongóknak szánják, hanem azért hozták létre, hogy lehetőséget biztosítson az embereknek. akik minden nap küzdenek fogyatékosságuk miatt. A robota szerző által kifejlesztett, ugyanúgy működik, mint a kerekes székrendszer otthon az automatizálás segíti a felhasználót a fény vagy a televízió irányításában, még akkor is, ha nem tud mozogni. A PC-vezérlő mód hasznos lehet még azok számára is, akik egészségesek. Hogyan működik?
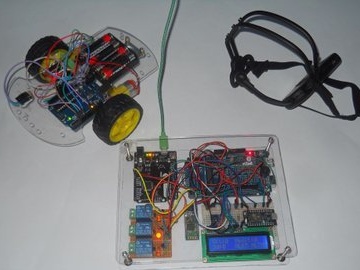

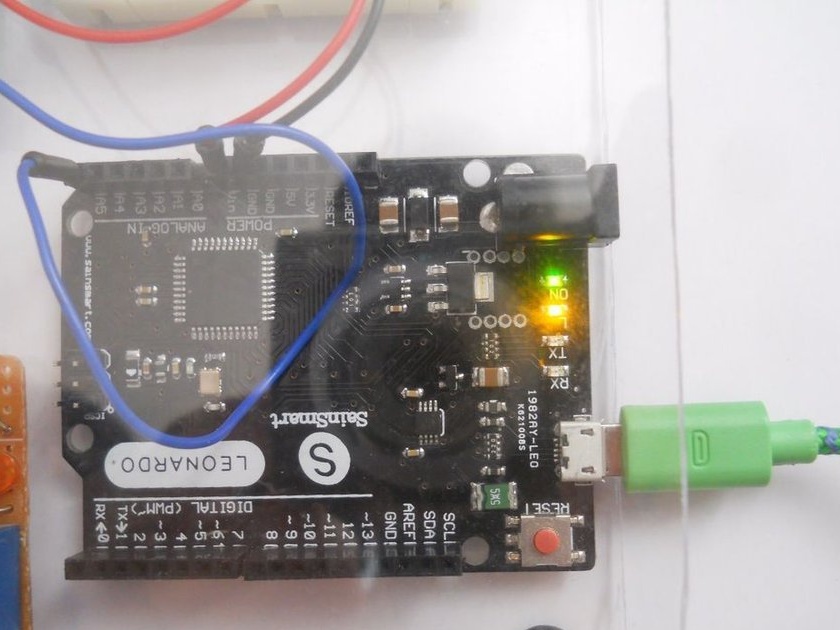
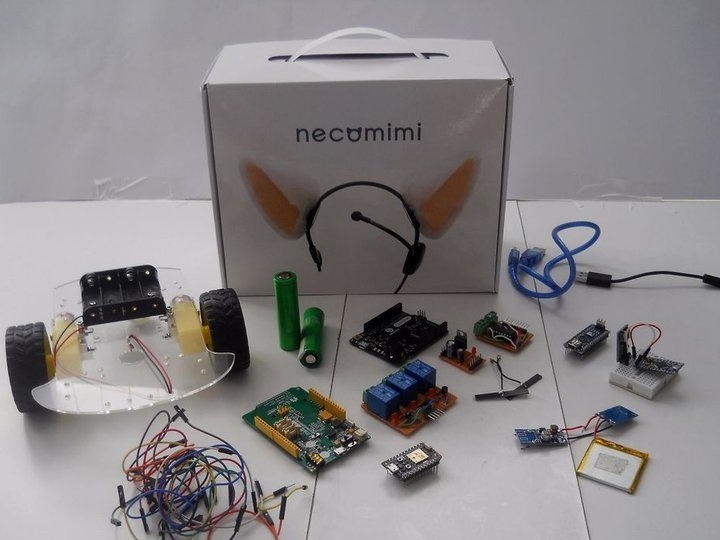
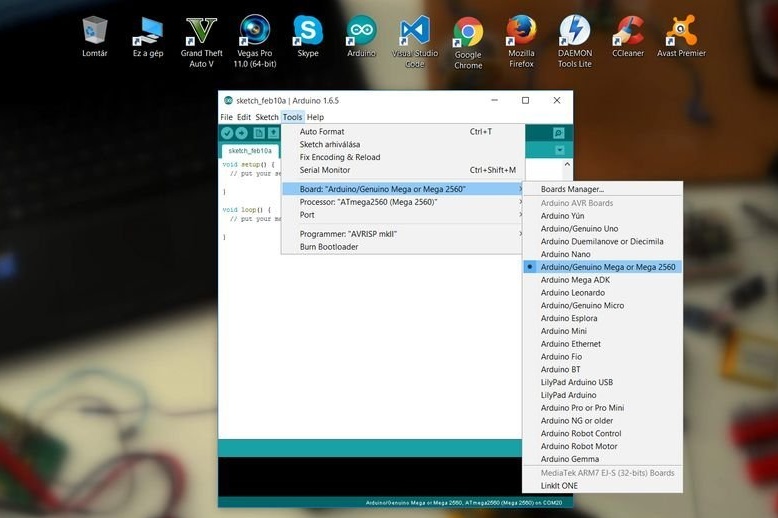
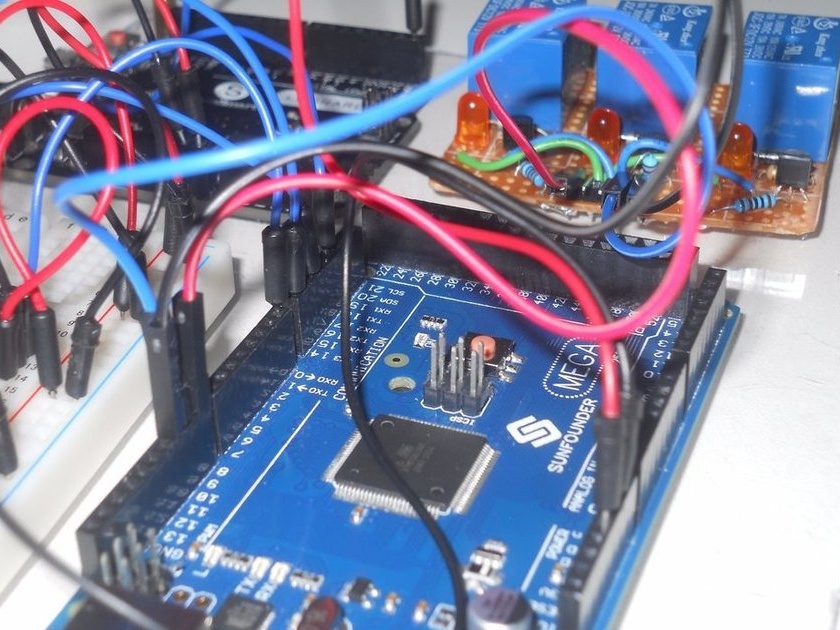
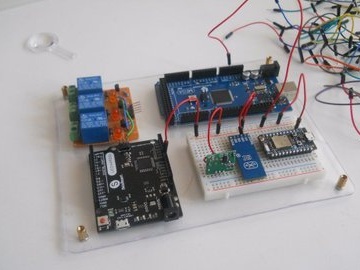
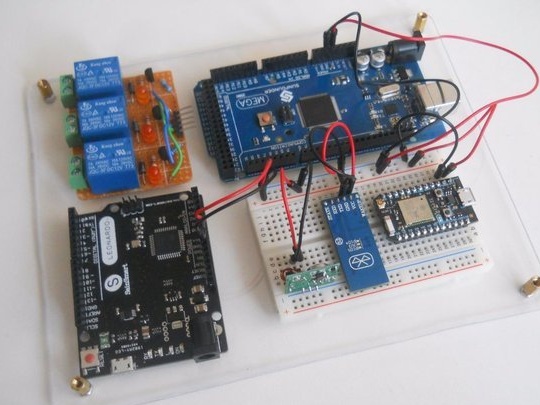
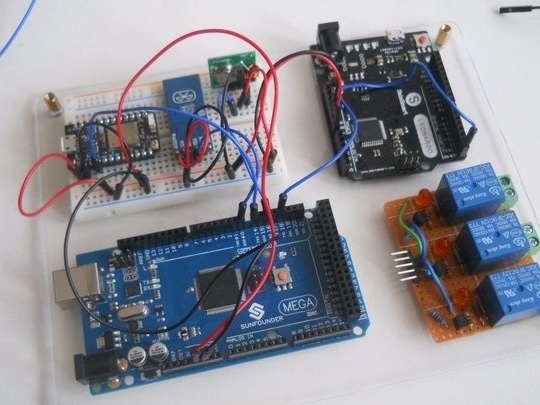
Négy mikrovezérlőt használtunk ennek a projektnek az életre: Arduino Mega, Arduino Leonardo, UNO és a részecske foton. A Mega a projekt agya, amely jeleket fogad a fejhallgatóról, elemzi és parancsokat küld más eszközökre. Minden adatot továbbít a Particle Photon-hoz, amely létrehoz egy webszervert. A Leonardo vezérli az egeret a számítógépen, az Uno pedig IR (infravörös jelek) vételére és a robot irányítására szolgál. Egy eszköz képes három különféle eszköz vezérlésére (vagy többre, ha valami mást szeretne programozni). Ezenkívül ezt a három különféle eszközt csatornáknak nevezzük. A készülék a következő csatornák között válthat, ha becsukja a szemét:
Csukja be a szemét 1-2 másodpercre: váltson az otthoni automatizálási funkcióra
Csukja be a szemét 2-4 másodpercre: váltson robotvezérlő üzemmódra
Csukja be a szemét 1-6 másodpercre: átvált az egérvezérlő üzemmódra
Az otthoni automatizálás funkciójának elvégzéséhez, amelyhez bármit csatlakoztathat: TV-t, izzókat, aljzatokat, bármit, amit kívánt, reléket használtunk
Az agyhullámok észlelésére - Necomimi, amely mozgathatja a fülét az agyhullámoktól függően (figyelem, meditáció). Egy kis chip belsejében, amely az agyhullámokat olvassa, kiszűri a zajt és nagyon jó jelet ad. Az UART (soros) felülettel működik, így némi hackeléssel az Arduino-t használhatjuk az agyhullámok olvasására.A fülhallgató szerepe az agyhullámok vezeték nélküli továbbítása egy központi szerverre.
Ha már ismeri előző projektakkor kihagyhatja a Necomimi szétszerelési és átalakítási szakaszát.
Menjen le, hogy megnézze, hogyan lehet szétszerelni és előállítani belőle a vezeték nélküli Bluetooth fülhallgatót.
Otthoni automatizálási rendszer
Ha átvált otthoni automatizálási módra, emelje meg a figyelem szintjét 70 felett, az első relé bekapcsolásához, növelje a meditációs szintet 70 felett, hogy bekapcsolja a második relét, és mindkét értéket növelje 70 felett, hogy bekapcsolja a harmadik relét. Ez egy kicsit nehéz, de nem lehetetlen az elme bizonyos gyakorlása után. Ha a relé már be van kapcsolva, akkor ugyanazzal a paranccsal kapcsolja ki (ha be van kapcsolva, akkor kapcsolja ki a 70-et). Amikor a rendszer készen áll, bármilyen nagyfeszültségű eszköz (világítás, TV, számítógép, ventilátor, bármi) csatlakoztatható a relémodulhoz.
Egérvezérlés
A kurzort az érzelmek vezérlik. Ha a figyelem szintje kevesebb, mint 25, akkor balra halad, ha 25 és 50 között jobbra, ha 50 és 75 között felmegy, és 75 és 100 között csökken. Az egérgombbal kattintást bocsáthat ki, ha megemeli a meditáció szintjét. Természetesen ehhez kell edzeni.
Robotvezérlés
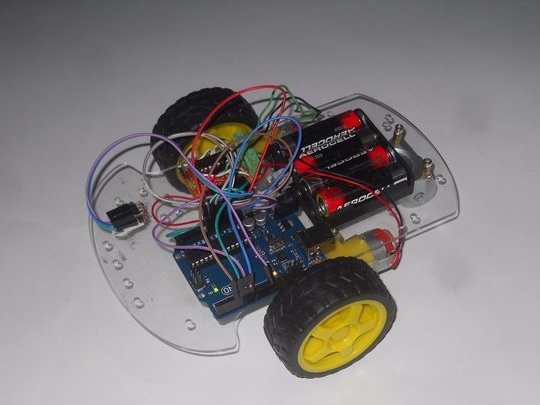
A robotnak csak három különböző csapata van: állj meg, fordulj balra, és lépj tovább. Miért csak két mozgási lehetőség? Mivel ez a két irány elegendő ahhoz, hogy a robot bárhová eljuthasson. Használja meditációs szintjét a robotkal való forgatáshoz, és amikor elérte a mozgatni kívánt irányt, állítsa le a robotot, majd a figyelem szintjével lépjen előre. Ez a legjobb módszer a robot irányítására, és még azok a kezdők is játszhatnak ezzel a robotmal, akik nem képesek olyan jól ellenőrizni a figyelmüket / meditációs értékeiket.
A fülhallgató BT (Bluetooth) jeleket továbbít az Arduino Mega felé, amely elemzi a bejövő bájtot, és a felhasználó gondolatától függően különféle funkciókat irányít. A szerző először a Particle Photon-ot akarta használni adatátvitelként, de ez a kis modul szerepet játszott egy webszerver létrehozásában. Ez volt a legnagyobb módosítás a teljes projektben. Ő házi készítésű Arduino modulokat is használt, de ezeket a modulokat online is megvásárolhatja.
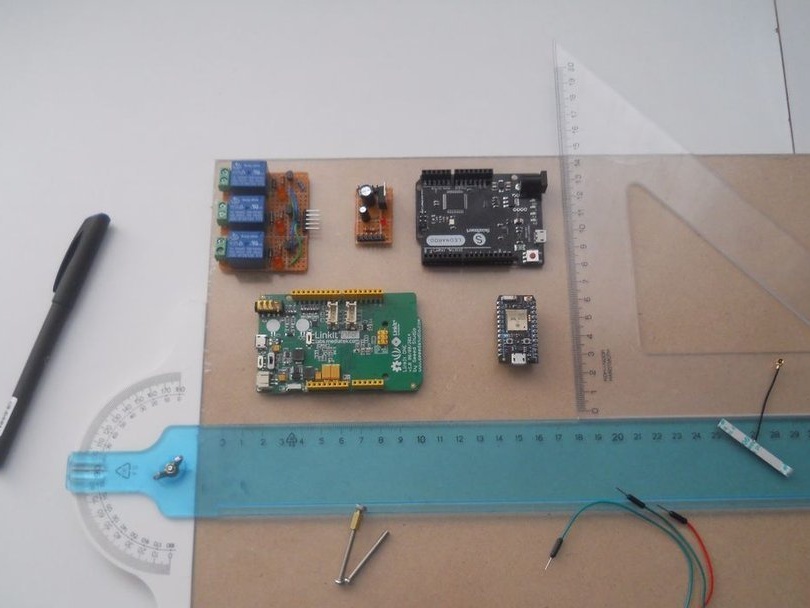
Minden alkatrész a GearBest.com webhelyről származik. Ez egy online áruház, hasonlóan az eBay-hez, de a pótalkatrészeket sokkal gyorsabban szállítják (talán mindez az aliexpress-en található). Ezért, ha saját játékvezérlőt, robotvezérlőt vagy Force Detecto r-t szeretne létrehozni, kezdje meg alkatrészek vásárlásával.






Szükséges eszközök:
forrasztópáka
forraszt
ragasztópisztoly
öntapadós szalag / kétoldalas szalag
huzal sztriptíz
huzalvágók
berendezés:
/ Arduino Nano
Szoftver:
Hackelés Necomimi







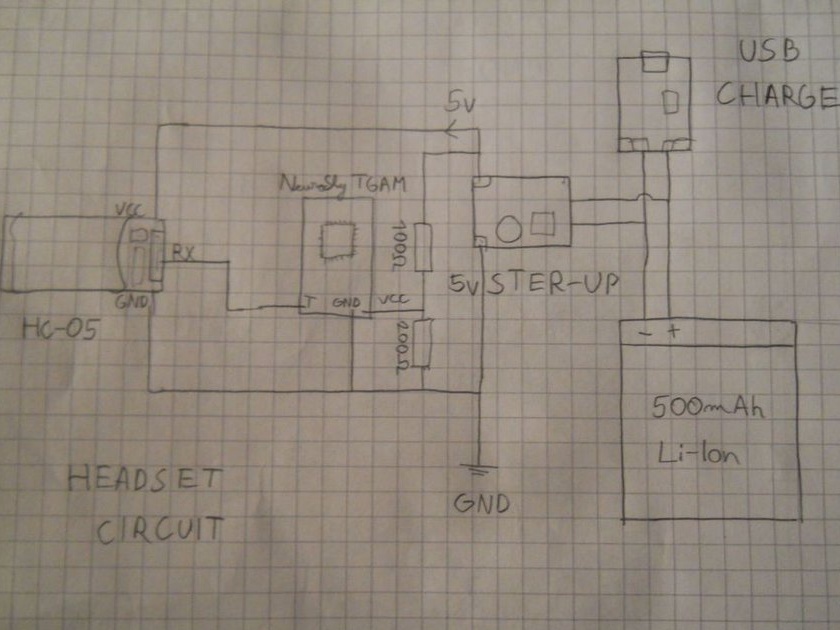
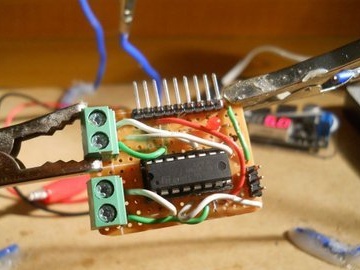
Módosítani akarjuk ezt az EEG játékot az adatátvitelhez Bluetooth-on keresztül, tehát először szétszereljük az ügyet. A csavarok a matrica alatt vannak. Távolítsa el a készülék matricaját és hátulját, és benne kis táblák találhatók. Az alaplap alatt található a Neurosky TGAM chip. A mikrovezérlő alaplapjáról 4 huzal van megforrasztva hozzá, tehát vegye ki a forrasztópászt és óvatosan távolítsa el ezt az áramkört. Most forrasztja a három vezetéket a GND tűhöz, a VCC tűhöz és a T tűhöz. A T-tű egy 57600 baud sebességű adó kimenet, amely adatcsomagokat küld a mikrovezérlőnknek. Miután a fenti három vezetéket megforrasztotta, beépítheti saját újratölthető áramforrását. A szerző egy 500 mAh-os lítium-ion akkumulátort, egy USB töltőáramkört, 5 V-os töltőáramkört és két ellenállást (100 Ohm és 200 Ohm) használ külön 3,4 V-os tápegység biztosítására a chip és a Bluetooth modul számára. A képen a csatlakozási rajz.
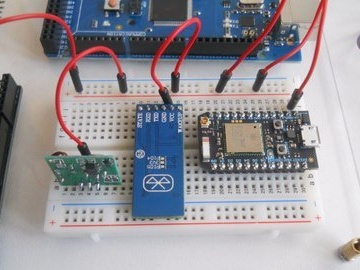
Ha az áramkör kész, konfigurálja a Bluetooth modult.
Kövesse az alábbi utasításokat és ábrákat, és készítse el saját vezeték nélküli EEG headsetjét.
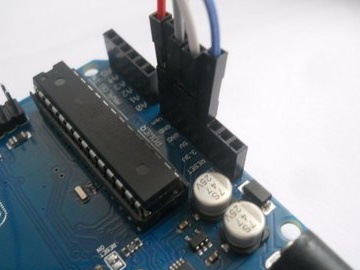
A legfontosabb az, hogy a „T” tűt csatlakoztassa a Bluetooth modul „RX” pontjához.



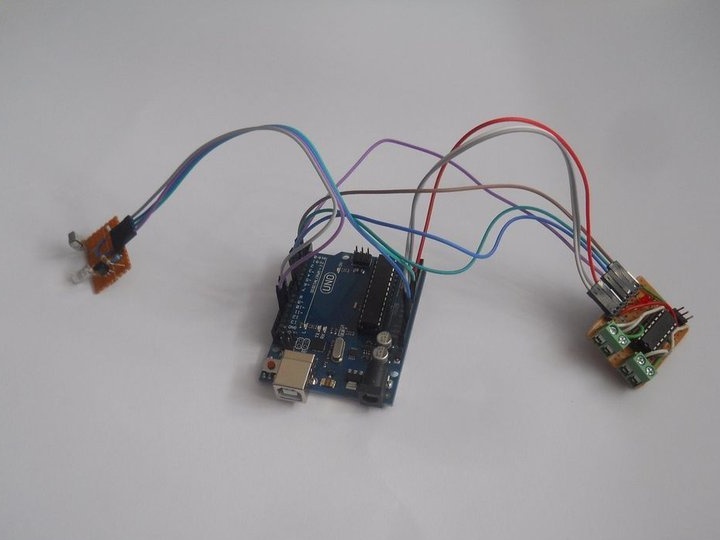
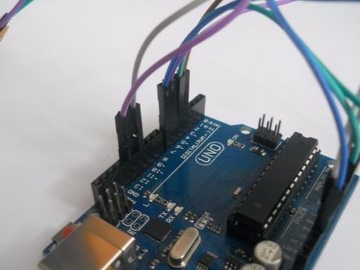
HC-06: Először töltse fel a „HC_06_Bluetooth” nevű vázlatot az Arduino UNO-ba, majd csatlakoztassa a Bluetooth modult az ábra szerint.
// HC-06-Bluetooth
érvénytelen beállítás () {
// Indítsa el a hardver sorozatot.
Serial.begin (9600); // alapértelmezett HC-06 adatátviteli sebesség
késleltetés (1000);
Serial.print ("AT");
késleltetés (1000);
Serial.print ("AT + VERSION");
késleltetés (1000);
Serial.print ("AT + PIN"); // a jelszó eltávolításához
késleltetés (1000);
Serial.print ("AT + BAUD7"); // Állítsa az adatátviteli sebességet 576000 értékre - pl. Necomimi alapértelmezett
késleltetés (1000);
Serial.begin (57600); //
késleltetés (1000);
}
void loop () {
}Nyissa meg a soros monitort az Arduino IDE-ben és várja meg, amíg az Arduino beállítja a BT modult. A Bluetooth modulod 57600 baudra van állítva. Kipróbálhat számos BCI (Brain Computer Interface) alkalmazást, mert ez a feltört Necomimi játék kompatibilis lesz minden Neurosky alkalmazással.
Ezekkel az alkalmazásokkal elsajátíthatja az agyhullámok irányítását.
HC-05: Akkor használja a „HC_05_Bluetooth” elemet, és ugyanúgy töltse be Arduino készülékét, mint korábban.
// HC-06-Bluetooth
érvénytelen beállítás () {
// Indítsa el a hardver sorozatot.
Serial.begin (9600); // alapértelmezett HC-05 adatátviteli sebesség
késleltetés (1000);
Serial.print ("AT");
késleltetés (1000);
Serial.print ("AT + VERSION");
késleltetés (1000);
Serial.println ("AT + ROLE = 1"); // állítsa a HC-05-et master üzemmódba
késleltetés (1000);
Serial.println ("AT + LINK =" Ide írja be a címét "); // most a modulnak automatikusan össze kell kapcsolódnia
késleltetés (1000);
Serial.print ("AT + UART = 57600,1,0"); // Állítsa az adatátvitelt 576000-re
Serial.begin (57600); //
késleltetés (1000);
}
void loop () {}
Csatlakoztassa a HC-05 "EN" érintkezőjét a 3v3 Arduino-hoz. Írja be a kódba a HC-06 modul címét. Ellenőrizze a BT modul címét Android okostelefonján. Cserélje ki a ":" (dupla pontok) helyét "," vesszőkkel a kódban.
És meg kell változtatnia a címet a kódban: 20: 15: 09: 15: 17: 82 = 2015.09.151782. Így a HC-05 modul felismeri a címet.
Távirányító
Ennek az olcsó robotnak a létrehozásához 38 kHz-es infravörös érzékelőt használtunk, amelyet a televízió távirányítóiban használnak.
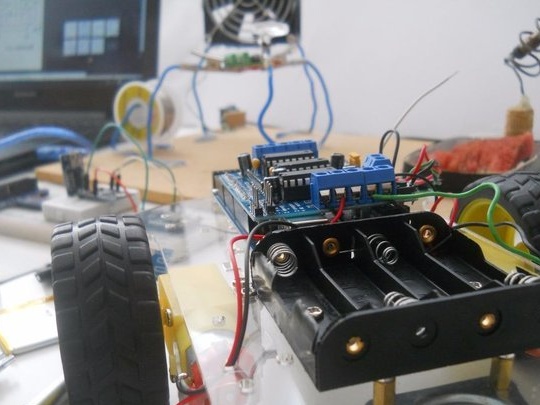
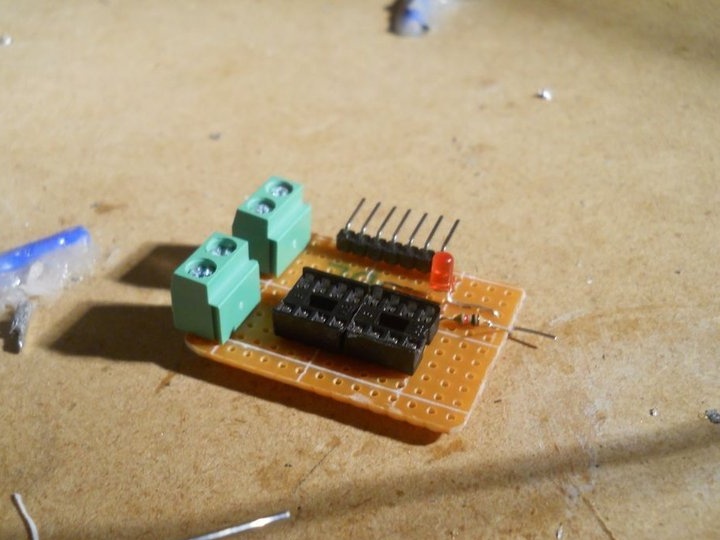
Motor vezető
Motor meghajtási rajz - A következőkre lesz szüksége:
2 csavaros csatlakozók
L293D IC3
Fejléc tű (90 fok)
1k ellenállás
Piros LED
huzal
Áramköri lap
Több rézhuzal segítségével és az ábrát követve csatlakoztassa a mikroáramkör csapokat a csatlakozó csapjaihoz. Nem számít, hogy a mikroáramkör melyik lába és a csatlakozó melyik csapja van, csak ne feledje, hova csatlakoztatta őket. A LED sorba van kötve az ellenállással és párhuzamosan az 5 V-os VCC-vel.
alváz szerelés
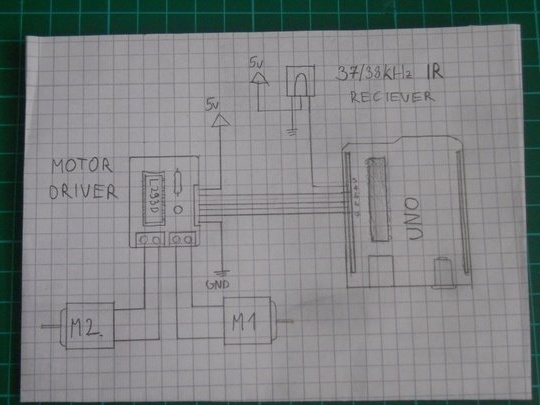
Elektromos motor meghajtóként az L293D chipet használják, amely két motort vezérelhet. Nézze meg a diagramot a diagram felépítéséhez.
Csatlakoztassa az alkatrészeket az Arduino-hoz
Arduino Pin == & gt; motoros
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Tehát nézd meg az L293D modul kapcsolási rajzát, majd csatlakoztassa az érintkezőit az Arduino UNO-hoz, a fent leírtak szerint. Az 5v tűt Arduino-nak az 1., 9., 16. érintkezőhöz kell csatlakoztatni, hogy aktiválják a forgácsmotor vezérlési funkcióját. Ezután végül használja a csavaros kapcsokat a motorok bekapcsolásához.
A könyvtár IRremote-t használ, egy olyan kódot, amely 38 kHz-es infravörös jeleket olvas, dekódol, és mozgatja a robotot. (Töltse le a könyvtárat a "szoftver" szakaszban).
Vannak megjegyzések a kódban, de az lényeg az, hogy dekódolja a fő szerverről érkező IR jeleket, majd a felhasználótól függően bekapcsolja a motort, majd a robot előre halad vagy balra fordul. Töltse le a "Robot_Code" kódot. Töltse le ezt Arduino-ba, és a robot készen áll.
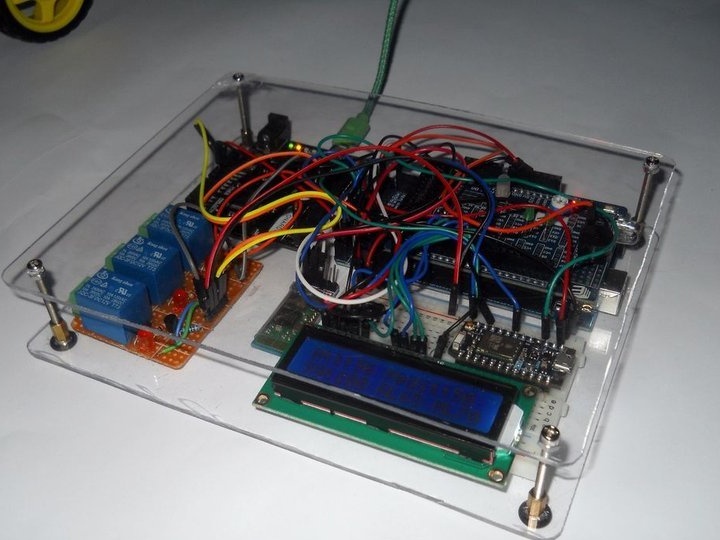
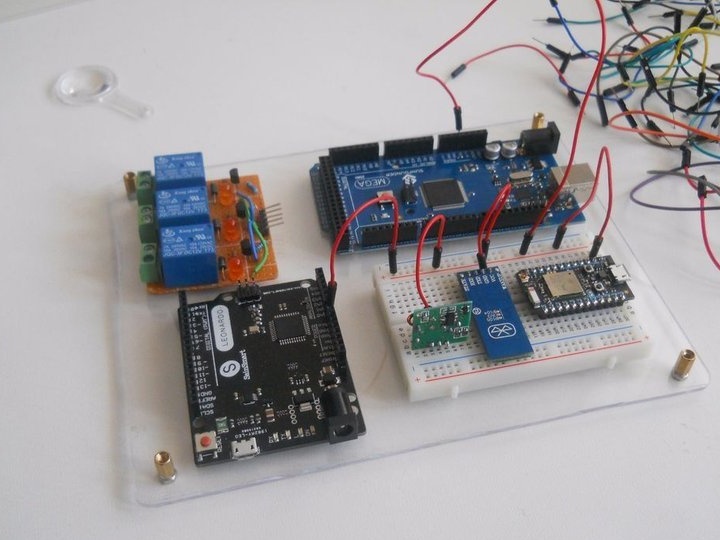
Fő szerver (Arduino Mega, Leonardo, Photon)




A szerver beolvassa a beérkező adatcsomagokat a vezeték nélküli headsetből. A konfigurált BT modult fogjuk használni a headset és a szerver közötti kommunikáció biztosításához. Az Arduino Mega az egész áramkör agya, minden csatlakozik ehhez a mikrovezérlőhöz: Bluetooth, infravörös adó LED, webszerver és egérvezérlő. A kód egy kicsit bonyolult, de általában megjegyzései vannak.
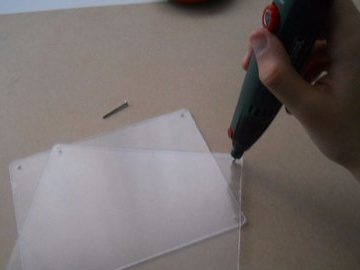
ház
Minden egyszerű. Két 18x15 cm-es plexi üveglapot simítsa le a széleit csiszolópapírral. Több csavar csatlakoztatható egymáshoz.
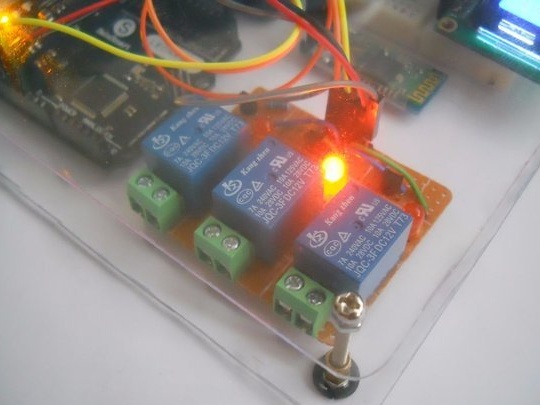
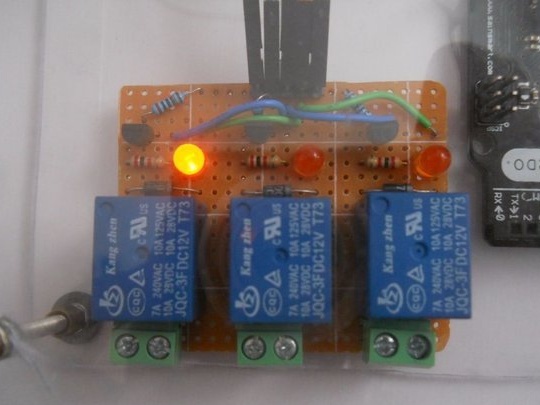
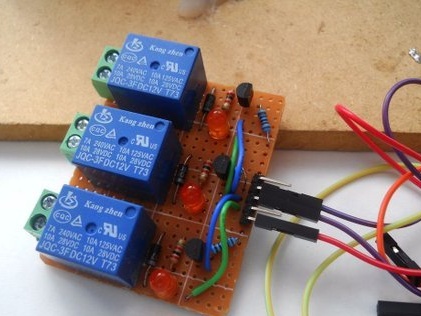
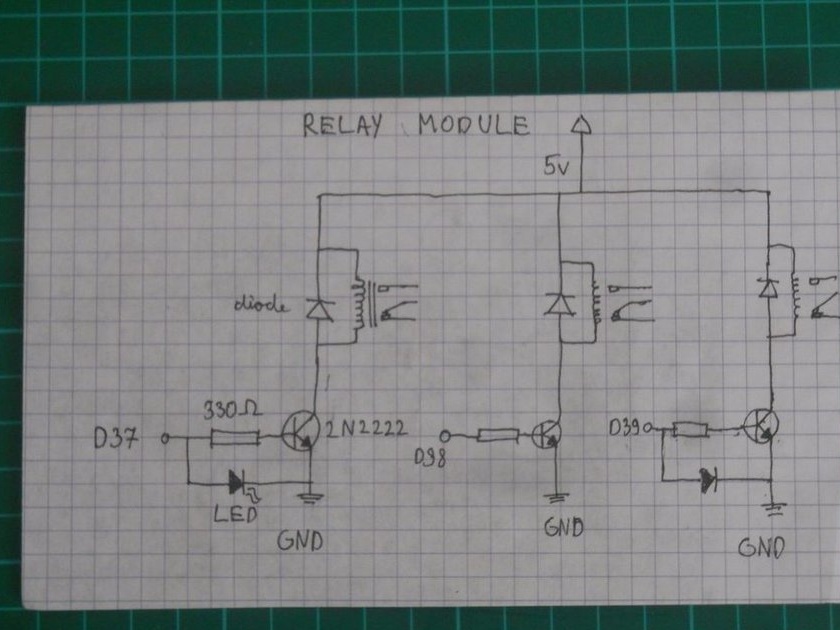
Relé tábla
Szüksége lesz a következő részletekre:
2n2222 tranzisztor (3 db)
germánium diódák (3 db)
330 ohm ellenállások (3 db)
1 kOhm ellenállások (3 db)
5 V relé (3 db)
tűs csatlakozók
Áramköri lap
Egy kép több, mint ezer szónál érdemes, tehát nézze meg az alkatrészek nyomtatott áramköri táblán történő összekapcsolásának vázlatát.
Ha a „Signal” kimenet Arduino-ból származik, akkor a relé bekapcsol. A tranzisztor erősíti a jelet, hogy elegendő energiát biztosítson a relé számára. 37-38-39 érintkezőket fogunk használni az egyes relék HIGH LOW szintjének szabályozására.
Az alkatrészek plexiüveg tokba történő felszereléséhez a szerző kétoldalas szalagot használt. Nagyon birtokolja a részleteket.
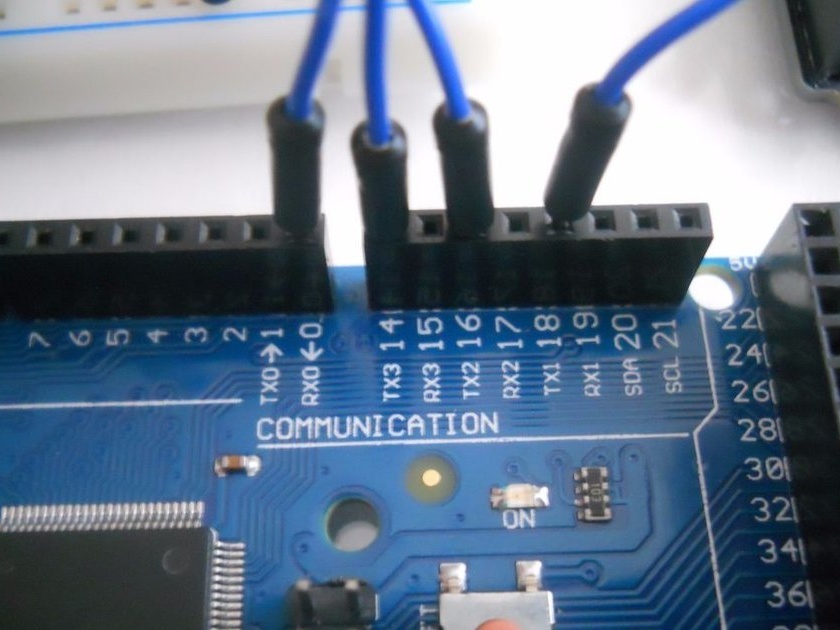
Ez egy szoftver szerver, így az áramkör létrehozása nem olyan nehéz. Csak be kell kapcsolnia a mikrovezérlőket, és létre kell hoznia a kapcsolatot közöttük. Az IR LED a D3 érintkezőhöz, a relé pedig a 37-38-39 csatlakozóhoz van csatlakoztatva. A D16 Arduino Mega megy az RX Photon, a D18 pedig az RX Leonardo-hoz.
Robot kapcsolat
[2,02 Kb] (letöltések: 14)
De most a kód készen áll és működik, így csak le kell töltenie a mikrovezérlőket. Töltse le a .ino fájlt, vagy másolja / illessze be a kódot az IDE-be, és használja azt. A Particle Photon kódját a böngésző IDE segítségével kell letölteni. Ehhez regisztráljon a. Csatlakoztassa laptopját a mikrovezérlőhöz. Minden szinte automatikusan történik, csak adja hozzá az eszköz azonosítóját.
A kódok letöltése előtt ellenőrizze, hogy nincs-e csatlakoztatva az RX / TX érintkezők. Tehát válassza le a Bluetooth modult a Mega-ról, és válassza le a Mega-t a Leonardo-tól és a Photon-tól.
[489 b] (letöltések: 15)

WebszerverAz IoT (a tárgyak internete) funkciójának a projektjéhez történő hozzáadásához a szerző online adatgyűjtőt készített a Particle Photon segítségével. Attól függően, hogy mit csinál az eszközzel, a Photon létrehoz egy személyes kiszolgálót, és adatokat ír a felhőbe.Ez eleinte félelmetesnek tűnhet, de képzelje el, hogy meg tudja határozni, ha stressz van-e (a figyelem szintje gyorsan növekszik és csökken) vagy érdemes-e aludni
(a meditációs szint mindig 80 felett van)
. Ez a webszerver segít egészségesebbé válni.
Böngésző kódolása
A Particlenek van egy online panele is, ahol bármilyen adatot közzétehet a “Particle.publish ();” használatával. szintaxis. Az Eszköztár fejlesztői sok időt takarítottak meg a felhasználók számára.
