
Jó napot minden kedves barátomnak! A mai cikkben szeretnék bemutatni egy meglehetősen érdekes ötletet házi, amit szinte bárki megtehet, aki legalább egy kicsit meg is tett iparművészet és ki tud valamit Arduinóról.
Általában véve ma egyszerűen fogunk csinálni robotok karton porszívó csináld magad. De te mondod, mert már elmondtam neked, hogyan lehet egy robotot tisztítani, és igazad lesz, de ez a robot porszívó sokkal egyszerűbb, olcsóbb és kényelmesebb, mint az előző. Igen, és ez a modell átalakított és jobban néz ki, valamint teljes automatizálással rendelkezik a fedélzeten. ezt páratlan munkát, nem csak segít az idő letelésében, hanem nélkülözhetetlen asszisztensvé is válik otthonában vagy műhelyében. Röviden: a dolog hasznos és nem bonyolult.
Hát akkor elegendő a hosszú előszó, menjünk!
Tehát ehhez a házi készítésű termékhez szükségünk van:
hullámkarton (sok karton)
-
összekötő vezetékek
-
-
- Kerekek motorokhoz
-motorhajtás az Arduino számára (a házi termék szerzője modellmeghajtót használ, amelyet be kell helyeznie az arduino-ba a csatlakozáshoz, de használhat olyan illesztőprogramot is, amely kényelmesebb, főleg az, hogy a feszültség illeszkedik a motorok alatti sebességváltókhoz)
-
műanyag kupak
- seprű sörte
-motor turbinaventilátorral, elvben magad is meg tudod csinálni
műanyag háló
- kis tartály
doboz két 18650 elemhez
-
Az eszközök közül is szükségünk lesz:
forrasztópáka
ragasztópisztoly
irodai kés
-lineyka
- ceruzák vagy jelölők
Az első lépés egy nagy kartonpapír, vonalzó és iránytű készítése. 13 cm-t mérünk egy iránytűvel, és rajzzunk egy kört kartonra, majd kivágjuk, összesen két ilyen körre van szükség:


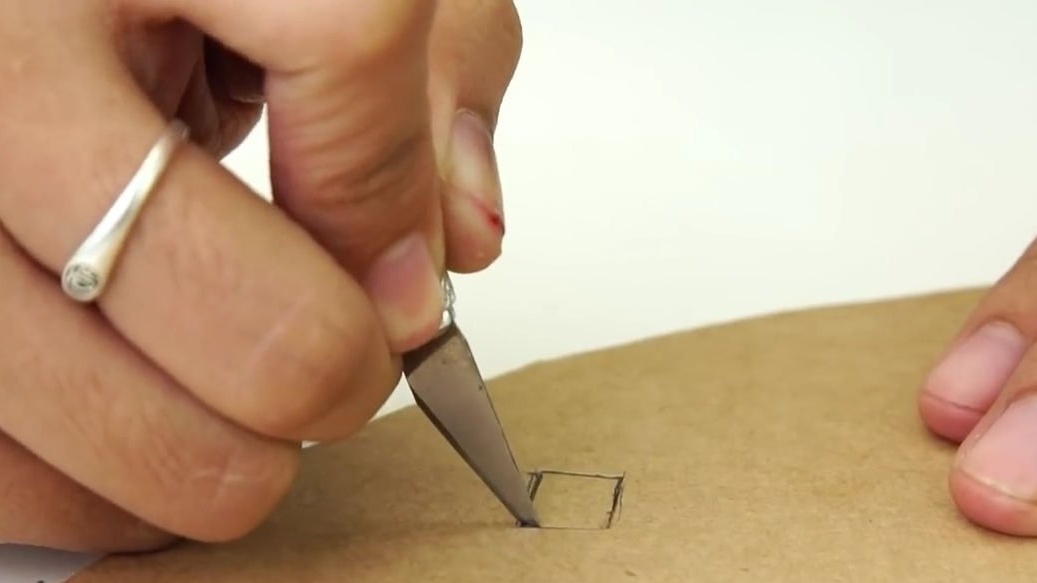
Ezután ugyanabból a kartonból kivágtunk egy kis méretű téglalapot. Vegyünk egy vonalzót és egy ceruzát, ceruzával húzzunk egy kartondobozt kb. 1 cm-es intervallummal, ezt az eljárást követően papírtervet készítünk és apró vágásokkal készítjük a karton felső rétegét anélkül, hogy megérintsük az alját. Ez szükséges ahhoz, hogy a karton elasztikusabbá váljon:



Az egyik karton kör körül csavarjuk a korai munkadarabot, és természetesen forró ragasztóval ragasztjuk be:

Foglalkozzunk az elektronikával és a mechanikus alkatrészekkel.
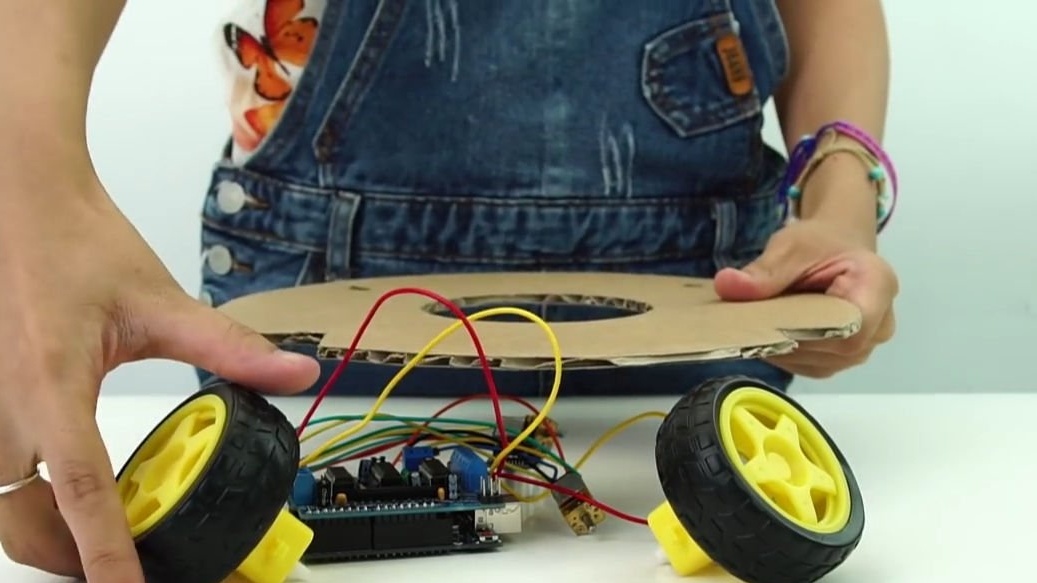
Az induláshoz vigye a sebességváltót és tegyen rá egy kereket, ugyanezt tesszük a második motorral:

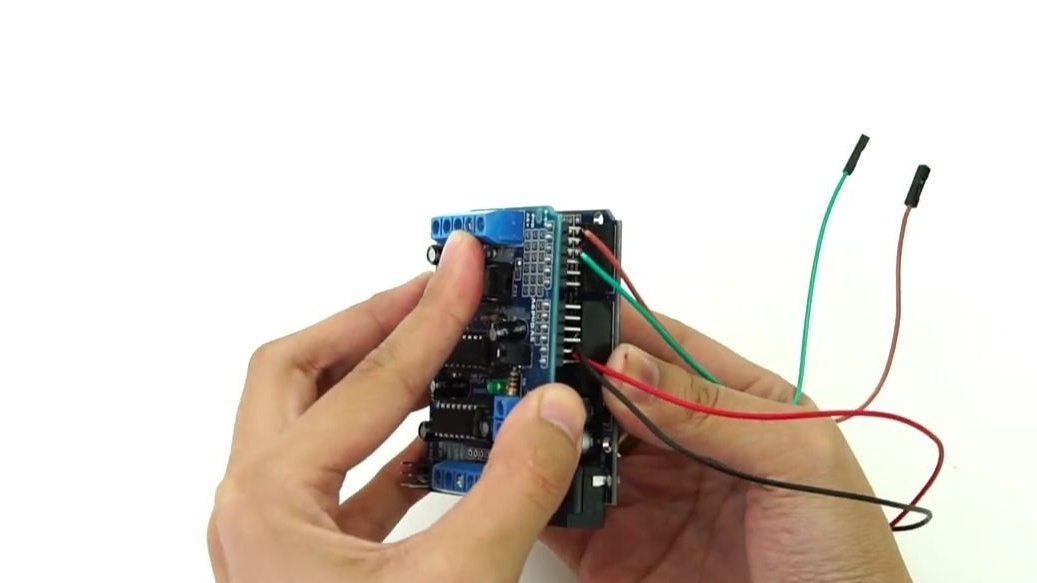
Ezután vesszük az Arduino Uno táblát és az összekötő vezetékeket, amelyeket viszont csatlakoztatni kell a táblán lévő egyes csapokhoz (érintkezőkhöz). A kényelem kedvéért különböző színeket veszünk: a vöröset 5 voltra, a feketét a GND-re, a másik két-két különféle csapot csatlakoztatjuk. Melyik érintkezőkhöz csatlakoztassa a vezetékeket, a kód alapján azonnal meg kell tudnia, vagy írnia kell azokat a csapokat, amelyekhez a vezetékeket csatlakoztatta. Általában itt nincs semmi bonyolult, összekapcsolunk:

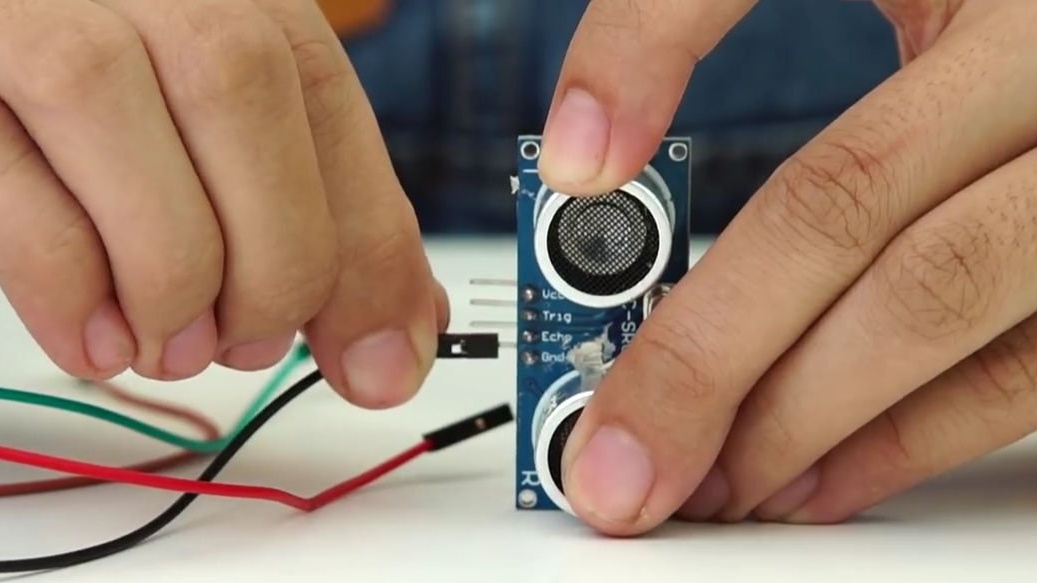
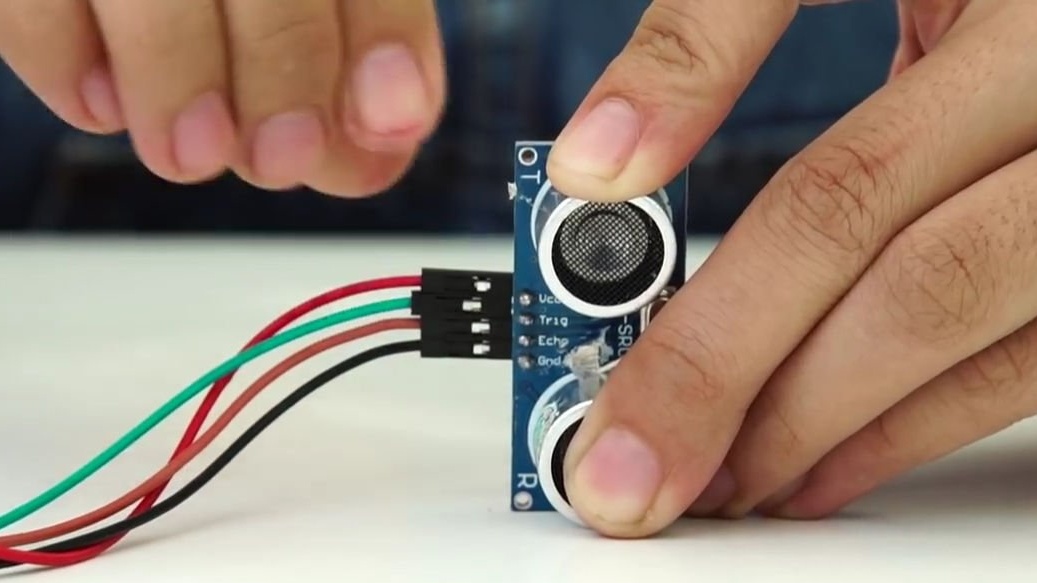
A vezetékek ellentétes oldalát az ultrahang-távolság-keresővel az alábbi képen látható módon csatlakoztatjuk. Ha ez nem egyértelmű, akkor megnézheti a szerző videóját.
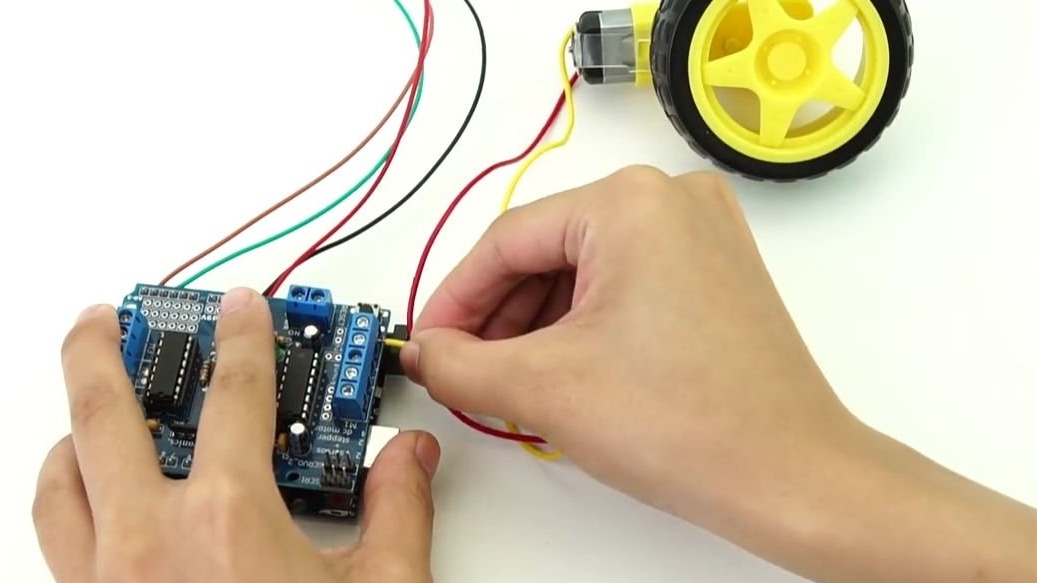
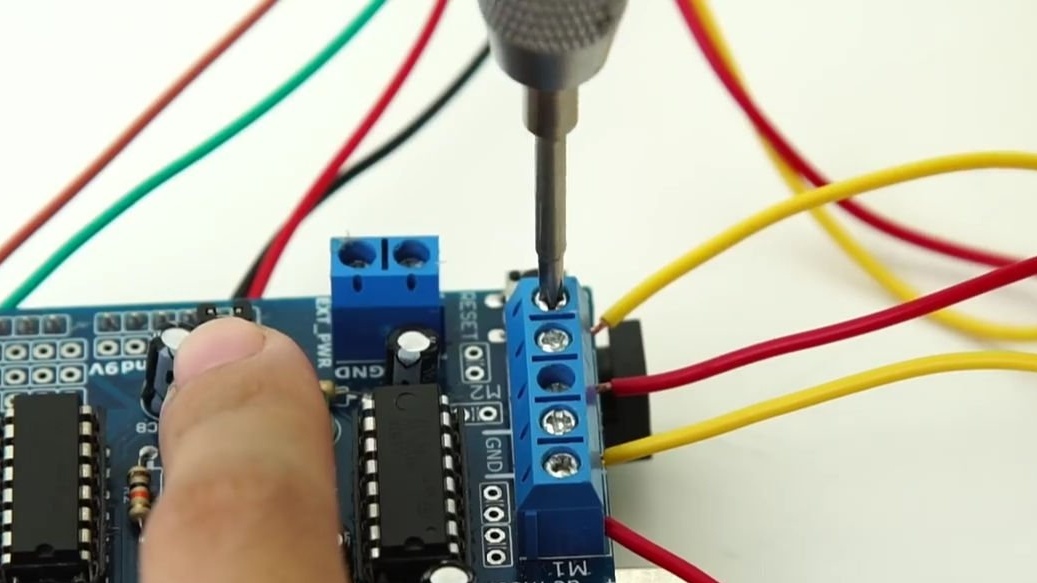
Csatlakozunk a hajtóműves motorokat a motorvezetőhöz, akkor semmit sem kell forrasztania, csak dugja be a bilincsekbe, és ennyi:

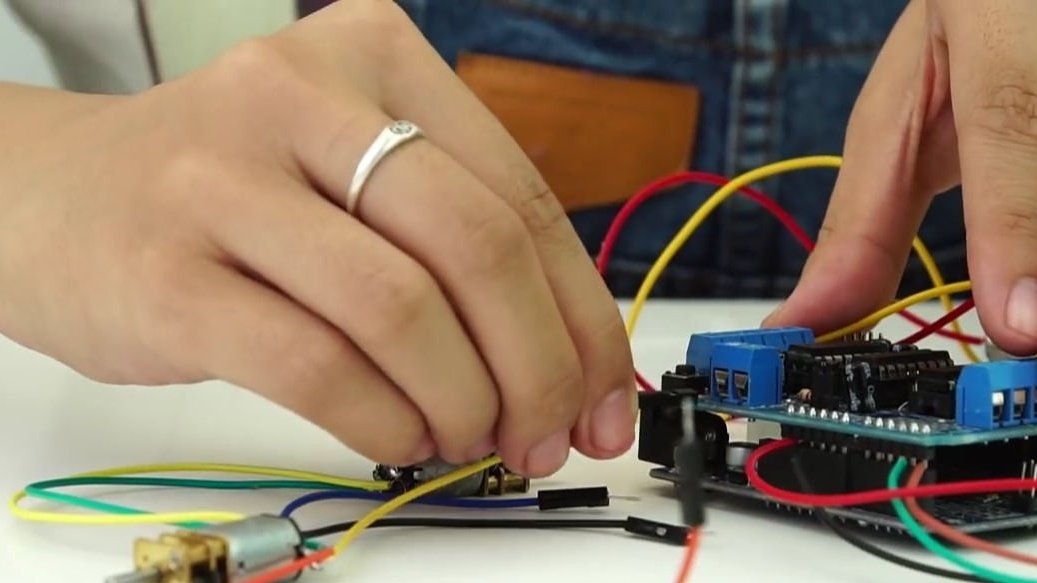
Meg kell forrasztani a csatlakozó vezetékeket a mini motorokhoz, amelyek segítségével ezeket a motorokat összekapcsoljuk a motor meghajtójával. Általában összekapcsoljuk:
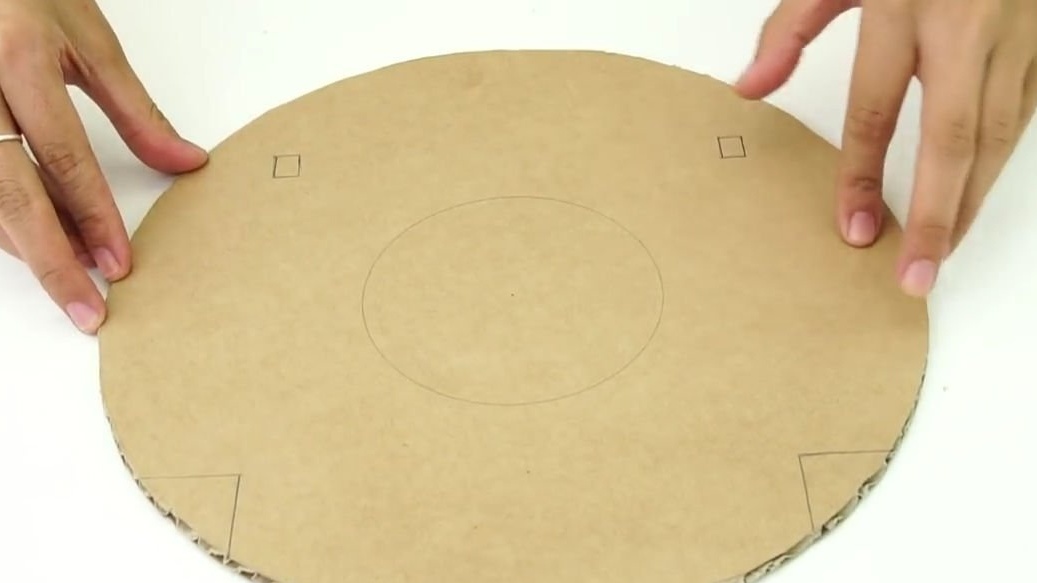
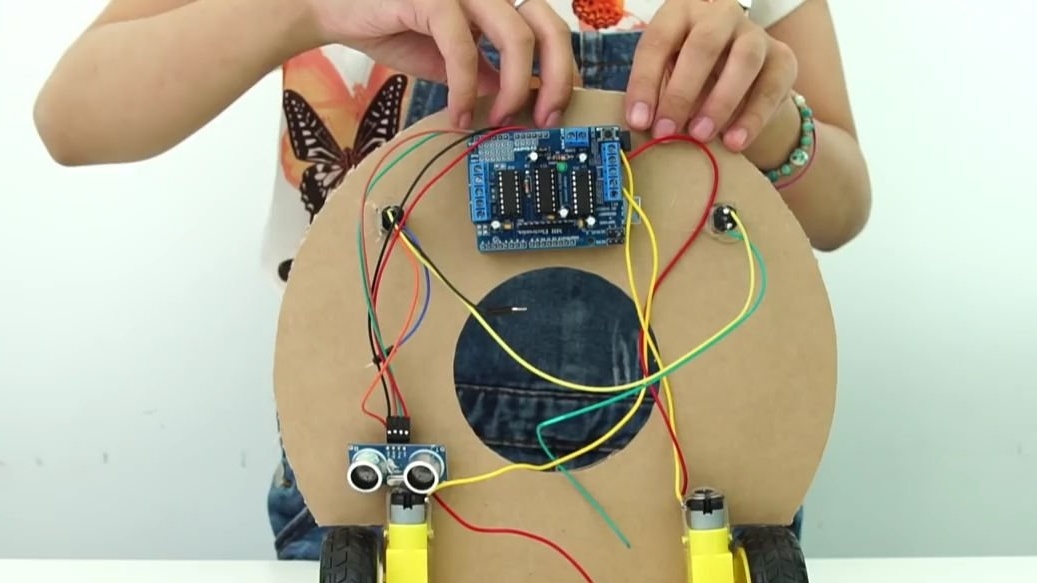
Most vesszük a fennmaradó kartonkört, amelyet a legelején készítettek. Rajzoljon rá egy másik kört a közepére és több téglalapot. Az összes jelölést az alábbi képen láthatja. Ezután kivágjuk a megjelölt lyukakat, ugyanúgy kellene kiderülniük, mint az alábbi képen:

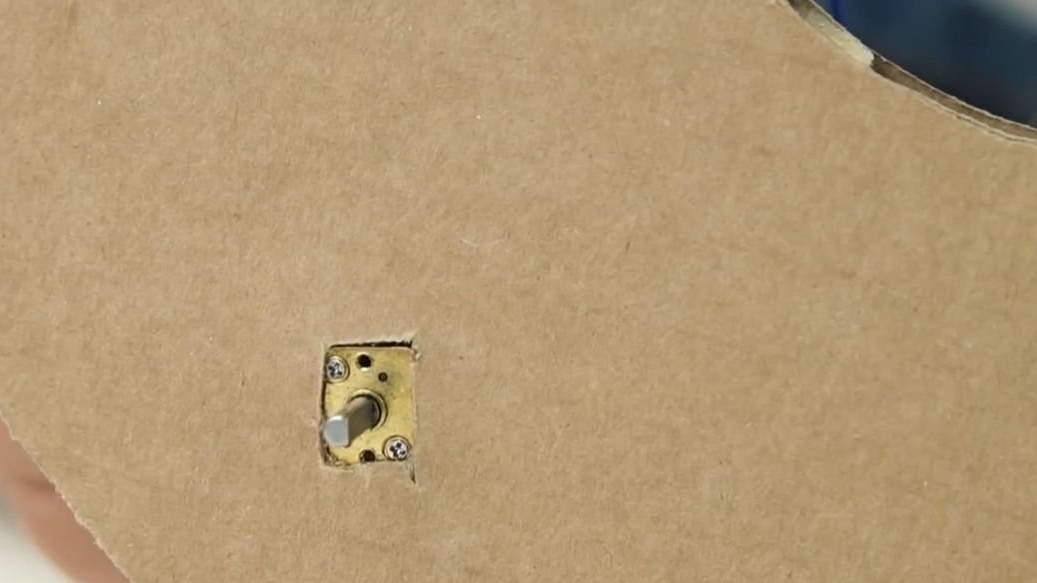
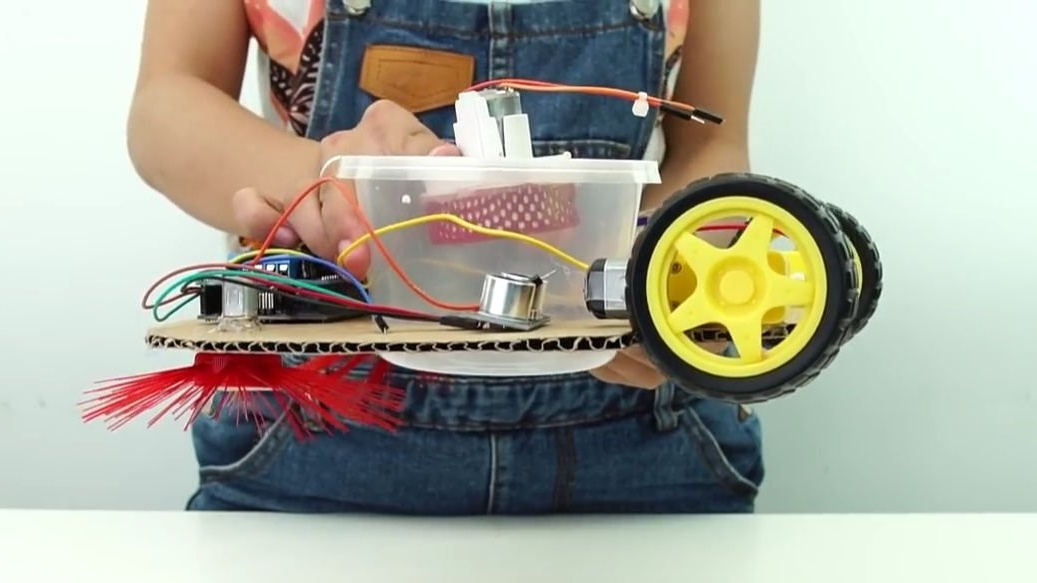
Vedd az egészet elektronika és tegye egy korábban készített karton körbe. Helyezzük a kis motorokat a hasított téglalap alakú lyukakba, és az elektronika többi részét melegen olvadó ragasztóval rögzítsük, a hajtóműves motorokat a hátsó oldalán párhuzamosan rögzítsük, és ne érintsük meg az ultrahangos távolságmérőt:

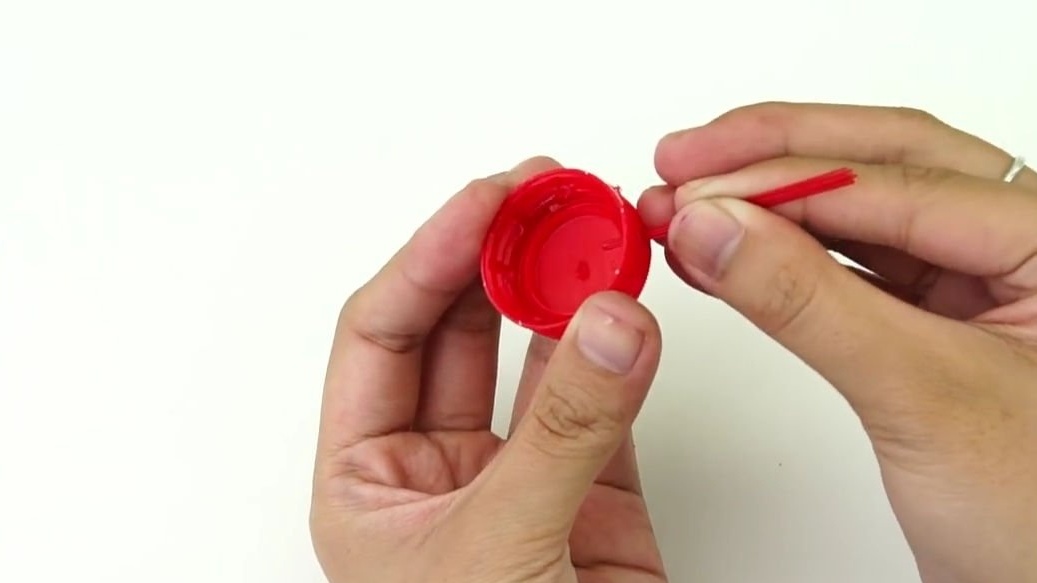
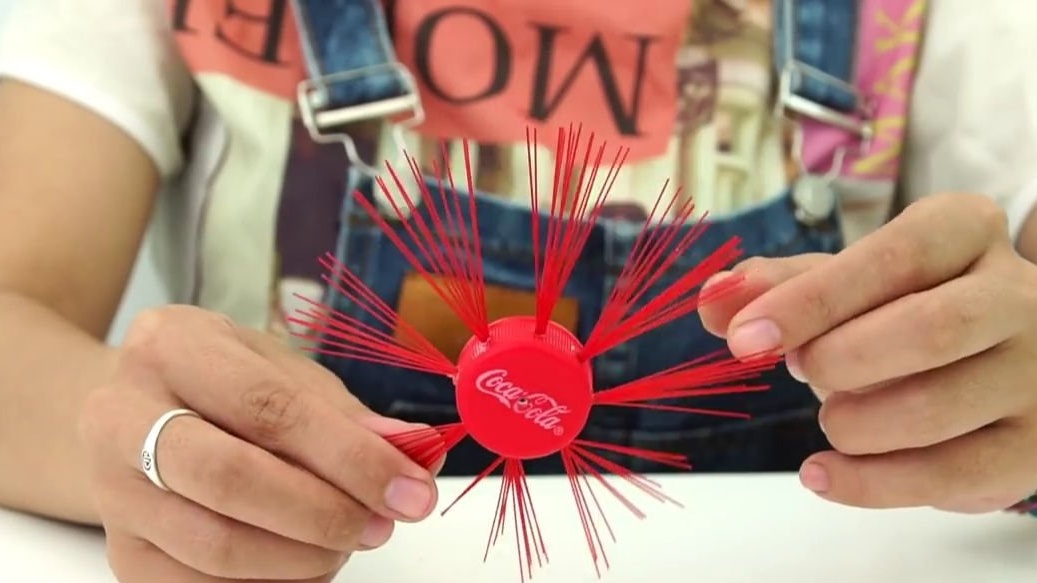
A műanyag palackokból eltávolítjuk a kupakokat, csak két darabra van szükségünk. Forrasztópáka, forró köröm vagy áthúzás segítségével lyukakat készítünk: az egyik a fedél közepén, a másik oldala körülbelül 1 cm-es behúzással van. Rögzítjük ezeket a sörtéket forró ragasztóval. Összességében két ilyen üres képet kell elkészíteni.
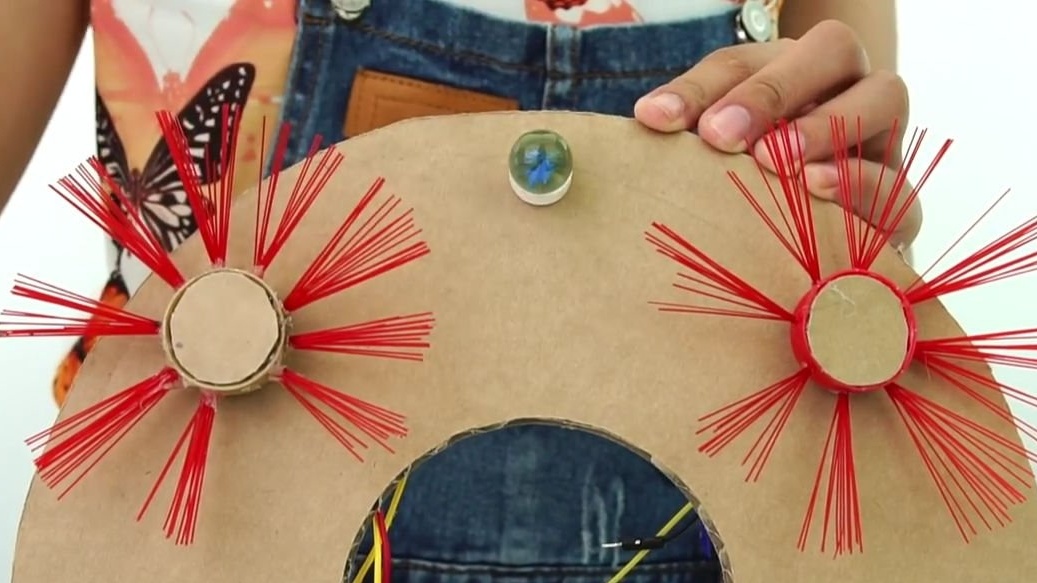
Ragasztjuk őket a kis motorok tengelyére, amelyek egy karton körön helyezkednek el. Újra ragasztjuk forró ragasztóval:


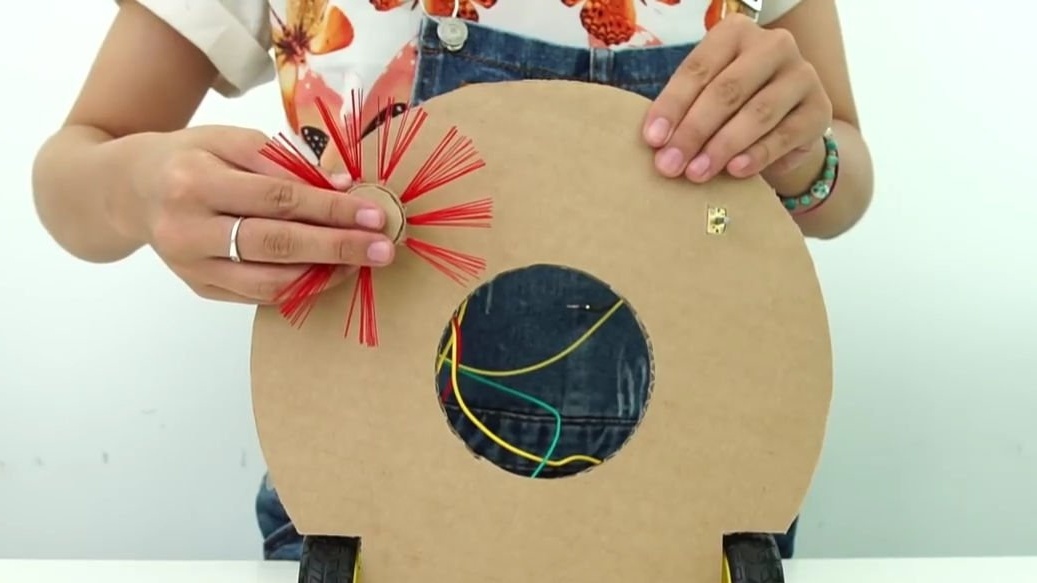

Elölről, két kefe között ragasszon be egy kis golyót vagy egy kis kereket, amely a tengelye körül foroghat:
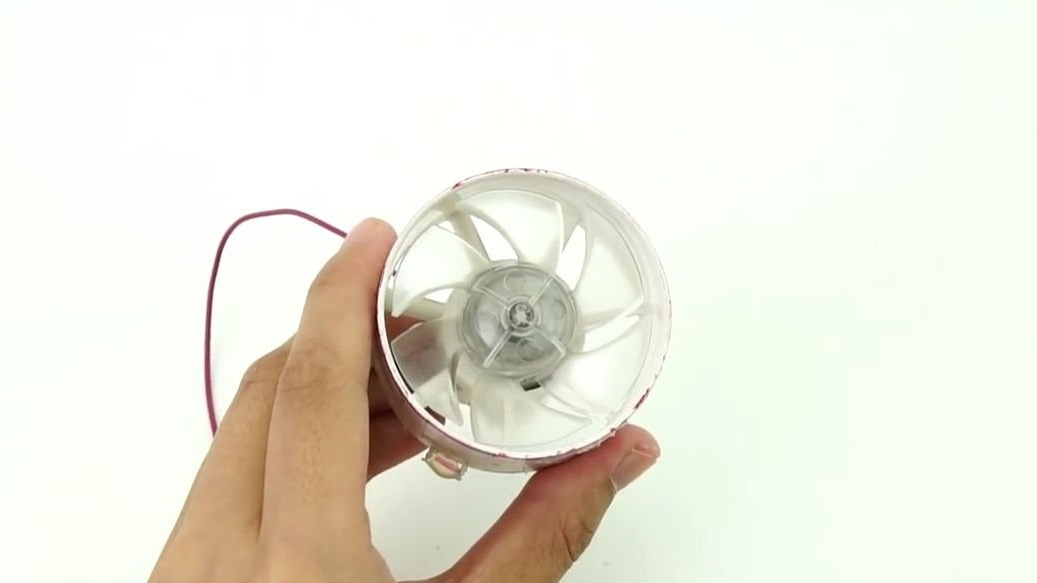
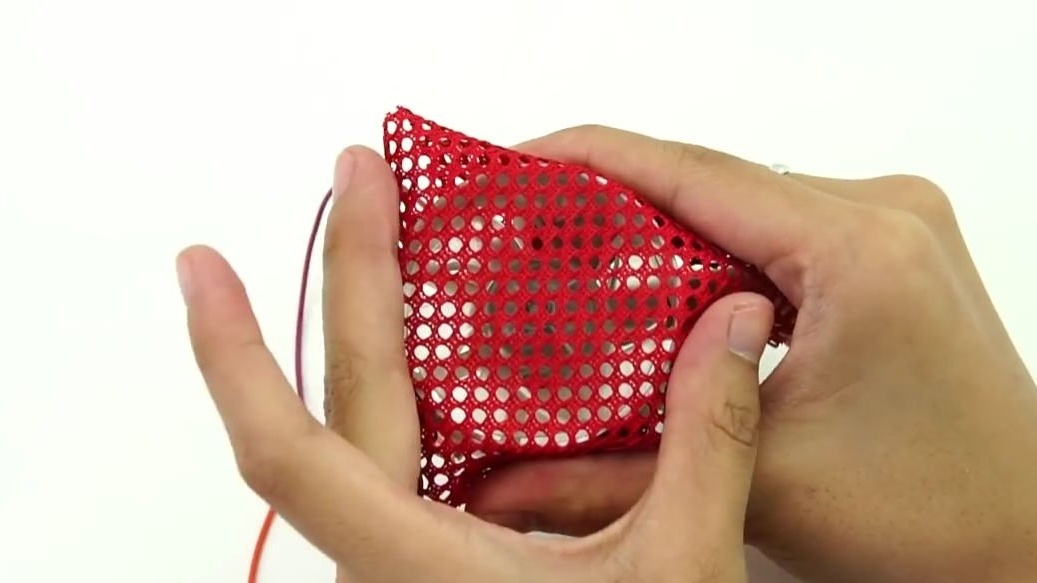
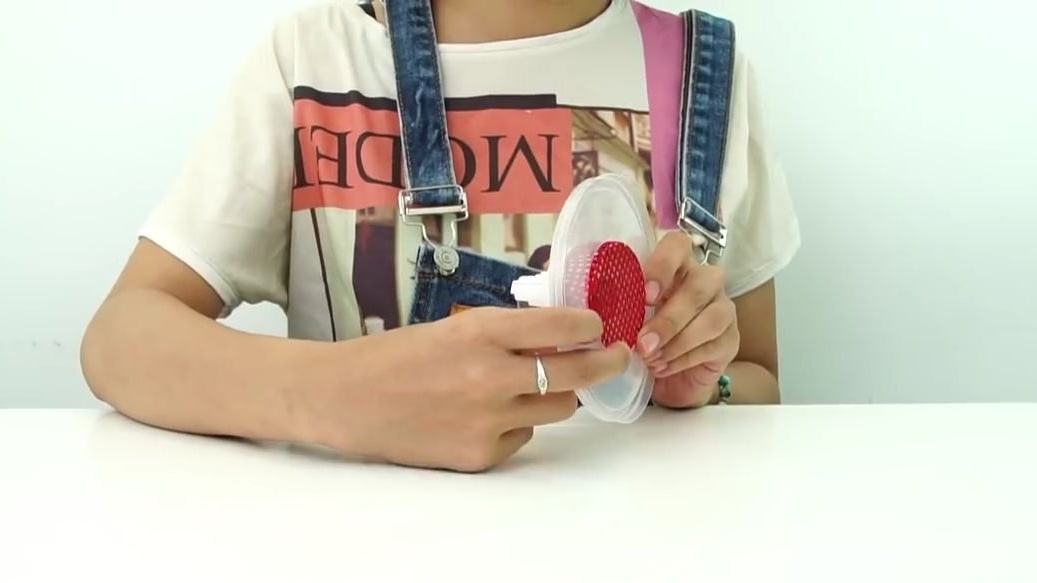
Most szükségünk van egy turbina villamos motorra, amely beszívhatja a levegőt, és általában egy nagyon erős hűtő jöhet létre. Felteszünk és rögzítünk egy műanyag hálót a turbina elejére, ez a turbina megóvásához szükséges, vagyis hogy megakadályozzuk a nagy törmelék bejutását és kiszivárgását. Távolítsa el a fedelet a műanyag tartályból. A tartálynak lehetőleg kör alakúnak kell lennie. A fedélben egyenletes, kerek lyukat készítünk, amelybe be kell illeszteni és ragasztani a turbina hálóval. Maga a tartályban egy apró, téglalap alakú lyukat készítünk szélével. Helyezzük a fedelet a turbinával a tartályra, és kész. A robot szívó része elkészült. Emlékeztetni szeretném, hogy mindent meg kell tenni az alábbi képen látható módon:



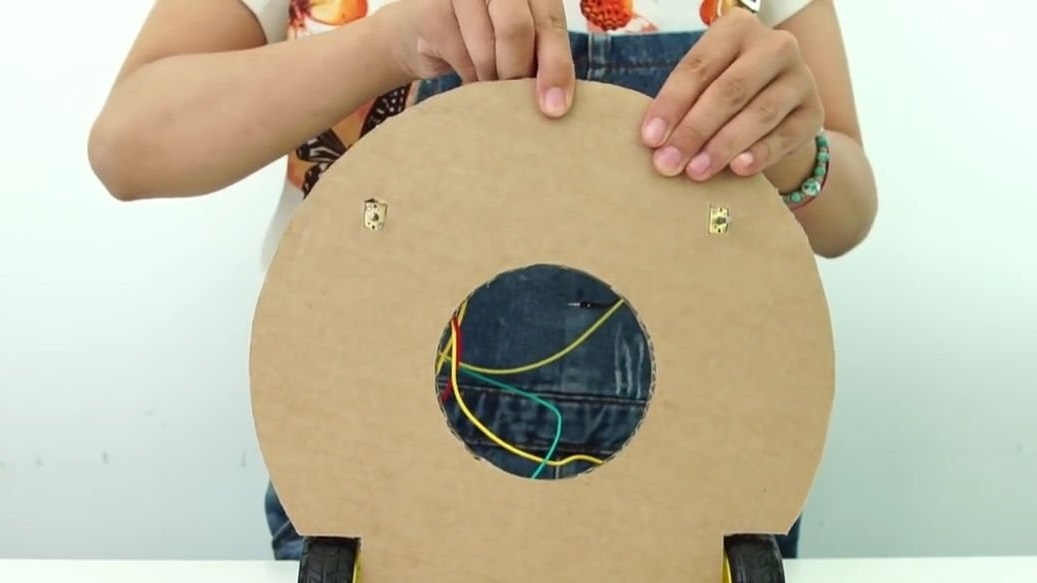
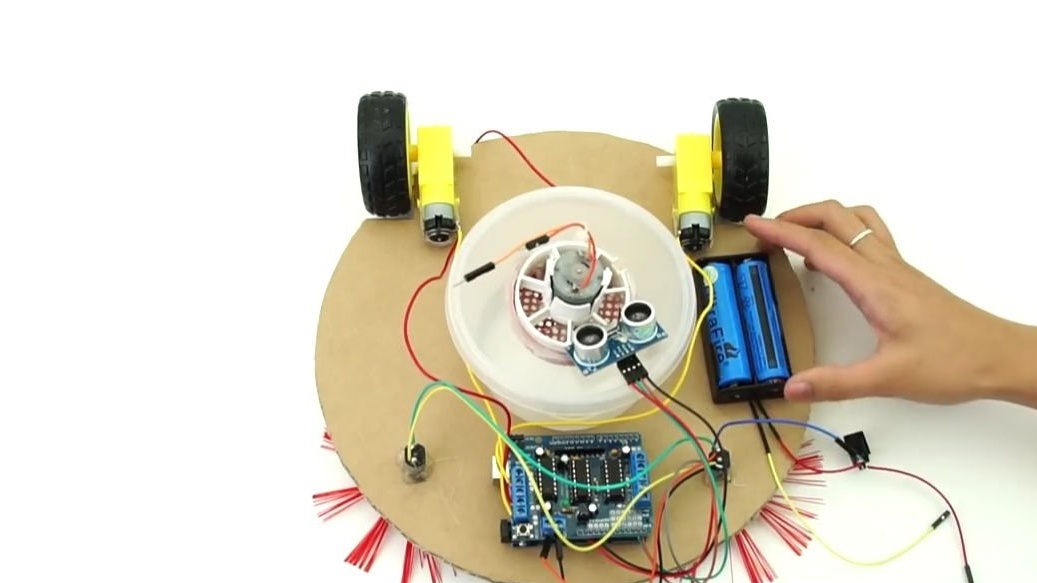
Fogjuk a robot alapját, és egy turbinatartályt helyezünk a központi lyukba, és mindent szilárdan ragasztunk forró ragasztóval. Ezután a szerkezet oldalára egy dobozt telepítünk 18650 elemmel és egy kapcsolóval, amely csatlakozik a dobozból származó vezetékek egyikéhez. Új vezetékeket csatlakoztatunk az Arduino táplálásához, végezünk fodrászokat és folytathatjuk.
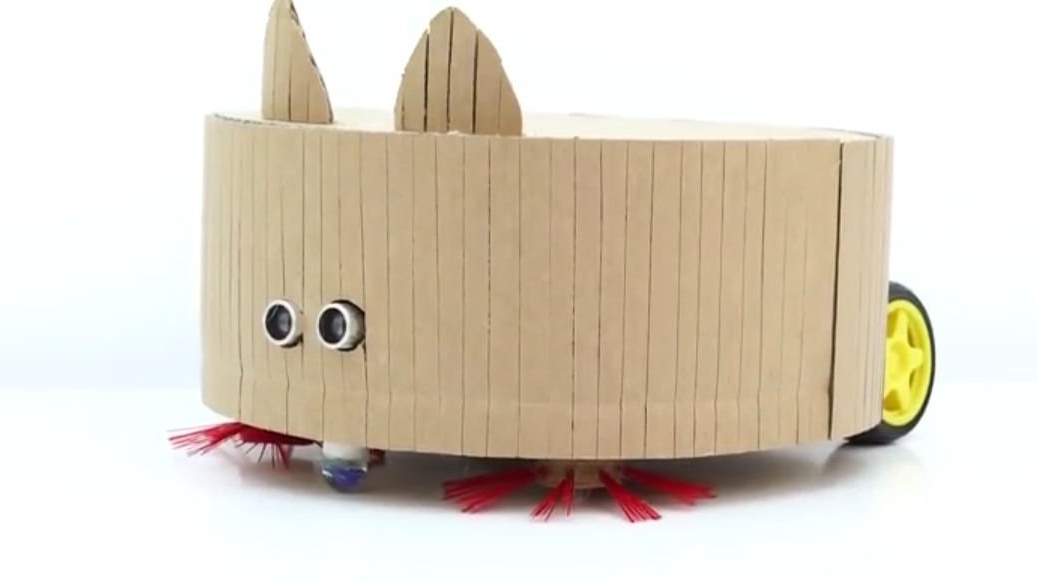
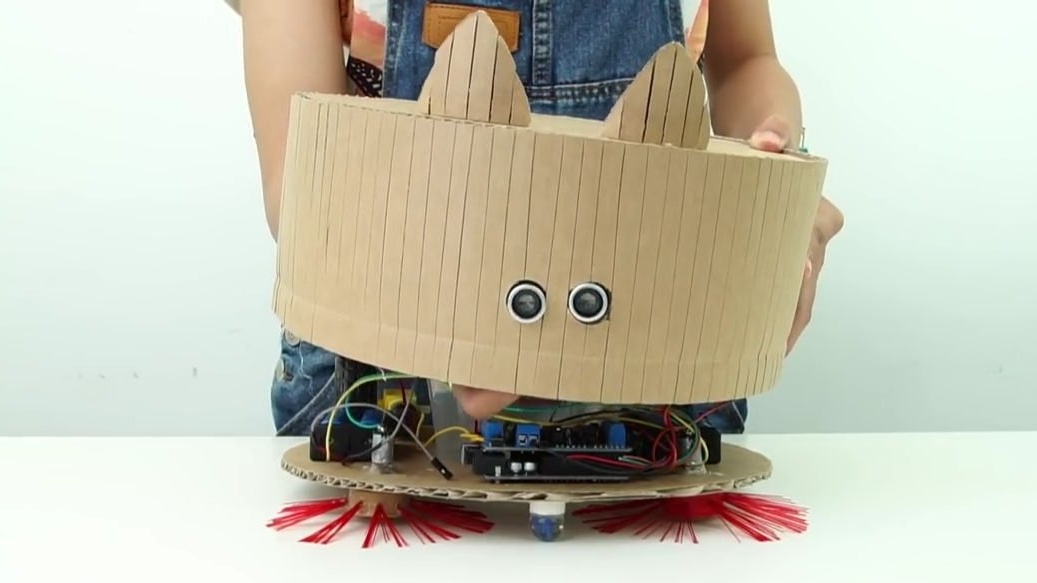
Az ultrahangos távolságmérőt speciális lyukakba helyezzük, amelyeket előre meg kell tenni a robottestben. Ez az épület, amint emlékszel, az elején készült. A cikk szerzője dekoratív elemeket is hozzáadott fülek formájában, és a szem helyett ultrahangos távolságmérő jön ki - mindez nagyon jó. Helyezzük a házat a szerkezet aljára és rögzítjük, de nem nagyon, mert ebben az esetben be kell szereznie az akkumulátorokat a töltéshez.Természetesen telepíthet egy modellt az akkumulátorok töltésére közvetlenül a robotba, de ez valószínűleg nem helyettesíti a kiváló minőségű töltést.
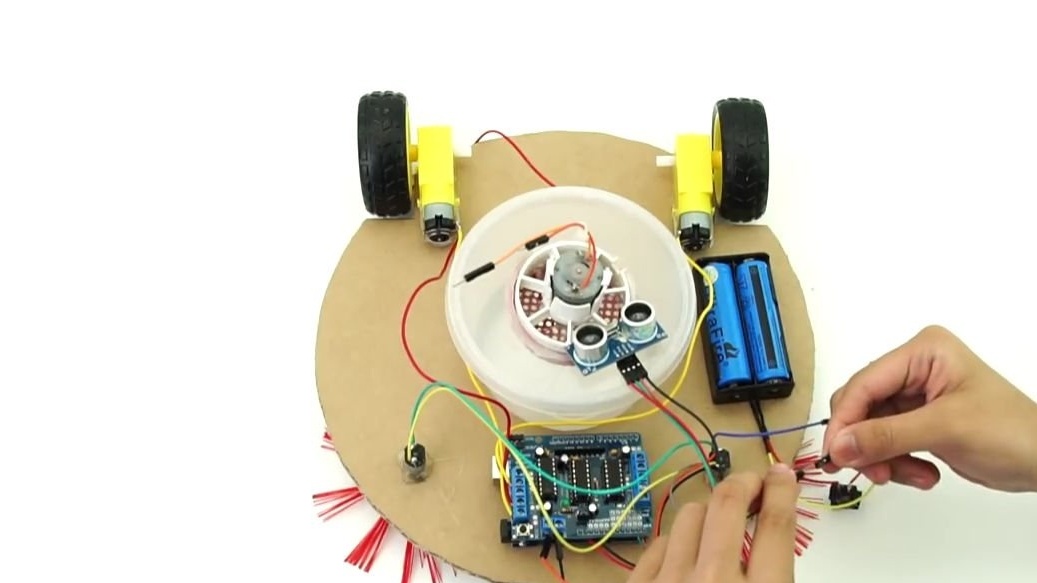

Csak a firmware feltöltése marad az Arduino-ba, általában ezt a legjobb az összes elektronikus alkatrész csatlakoztatása után megtenni, hogy ellenőrizze az áramkört és a kódot, de később megteheti. A legjobb, ha vázlatot ír magának az Arduino-nak az öntésére, de egyszerűen megtalálja az interneten egy kész vázlatot robotokra egy ultrahangos érzékelővel, amely akadály körül megy át, az ilyen vázlatok előnye már most teljes. De a különféle bukások elkerülése érdekében \ jobb, ha önállóan írunk, magadnak.
Nos, ennyi! Készen áll egy egyszerű és működőképes robot porszívó, csak a tesztelése marad! Ehhez csak kapcsolja be, és kezdje el a padlón lovagolni, és porszívja az összes szemetet. A robot mozog és elfordul, amikor az akadály megközelíti, és ez sokkal kényelmesebb, mint az előző modellek.



Itt van egy videó a szerzőtől, amely részletes összeállítást és házi teszteket tartalmaz:
Ezt a robotot egy hatalmas bankból is táplálhatja, természetesen láthatja a részletes áttekintést egy jóról, akit ez érdekel:
Nos, mindenkinek sok szerencsét a jövőbeli projektekben, barátok!