

Egy ilyen robot saját kezével készítése egyáltalán nem lesz nehéz és még érdekes. Az eredmény egy nagyon érdekes eszköz, amely élő lényként viselkedik. Mindez két kicsi motornak köszönhetően ők vezérlik a robotot. A motortengelyek támadási szögének megváltoztatásával gyorsabbá vagy lassabbá teheti a robotot. Kísérletezhet különféle tippekkel is, amelyek viselhetők a motor tengelyén.
Anyagok és eszközök:
- két kis motor (3 voltos, megtalálható a gyermekek játékában);
- akkumulátor tartó (magad csinálhat, vagy kihúzhatja a régi távirányítóból, zseblámpából stb.);
- két SPDT típusú kapcsoló (egy régi számítógépes egérből beszerezhető);
- két kicsi és egy nagy gémkapocs;
- egy kis kerék a játékból;
- vékony huzalozás

Gyártási folyamat:
Első lépés. Forrasztás huzalozása
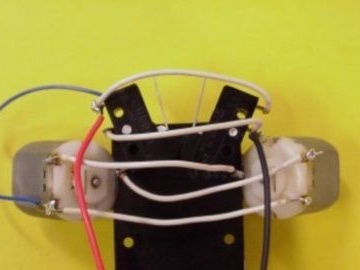
Mindenekelőtt elő kell készítenie a vezetékeket, és meg kell forrasztani azokat az összes elektronikus alkatrészhez, hogy később kényelmesen csatlakoztassák a csomópontokat. A vezetékeket 6 cm hosszúra kell vágni, és végüktől kb. 1 cm-rel le kell távolítani. Ezenkívül ne felejtse el forrasztani a két vezetéket az elemtartó érintkezőihez. A huzalok többi végét előnyösen ónozzuk.

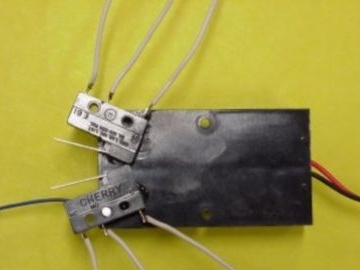
Második lépés Kapcsolók beállítása
A kapcsolók beállításához az elemtartót fejjel lefelé kell fordítani. Most meg kell ragasztania a kapcsolókat ragasztóval az akkumulátor tartóra. Ennek eredményeként létrejön az V. betű.
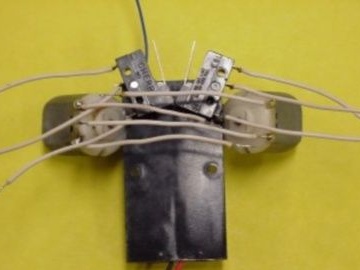
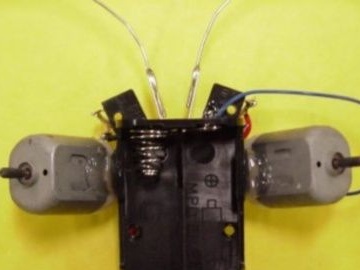
Harmadik lépés Motor beszerelése
A motorokat a képen látható szögben kell az elemtartóhoz rögzíteni. A szögeknek mindkét oldalon azonosaknak kell lenniük, különben a robot nem fog megfelelően működni. A motortengelyeknek az útnak kell feküdniük. A motorokat ragasztóval lehet felszerelni.

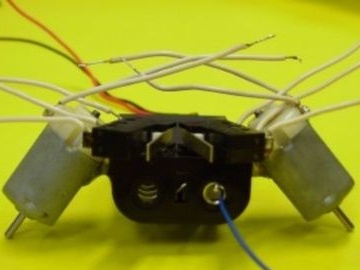
Negyedik lépés A stabilizátorkerék felszerelése
A stabilizátorra szükség van Házitermékek laposan állt az úton. Kerék elkészítéséhez használjon hengert egy magnóból vagy egy kereket egy gyermekjátékból. Ami a „dugót” illeti, hosszú gemkapocsból vagy húrból készül.Összefoglalva: a stabilizátor egyenletesen tapad az akkumulátor tartójához.

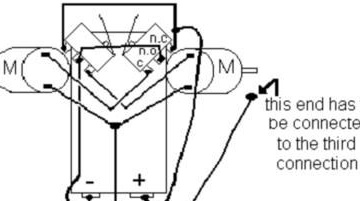
Ötödik lépés Vezetékcsatlakozás
Annak érdekében, hogy a robot helyesen működjön, az összes vezetéket egyértelműen a terv szerint kell csatlakoztatni. Az áramkör a képen látható.

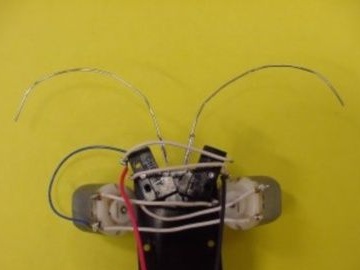
Hatodik lépés Bajusz készítése a hibára
A bajusz kerékként szolgál a bogár számára, amint akadály találkozik útjában, a bajusz bekapcsolja a kapcsolókat, majd a motorok a robotot más irányba fordítják. A kapcsoló aktiválásakor az egyik motor kikapcsol, és egyfajta differenciálmű aktiválódik. Ha mindkét kapcsoló be van kapcsolva, a robot teljesen leáll. A bajusz kicsi gemkapcsokból készül, ezeket óvatosan kell ragasztani a kapcsológombokhoz.

Hetedik lépés. A robot végső felülvizsgálata és tesztelése
Az utolsó szakaszban gumiabroncsokat kell felszerelni a motortengelyekre, amelyek szükségesek a jobb tapadáshoz. Kambrikból készülhetnek.
Ez minden, a robot készen áll. Sima felületen, például asztalon vagy linóleumon kell futtatnia. Mivel a bogár lábai túl kicsik, nem fog a szőnyeg mentén mászni, ehhez növelni kell a motortengelyek hegyét.
A jövőben a robot saját belátása szerint frissíthető. Például elkészíthet olyan LED-es szemeket, amelyek akadályba kerülve kigyulladnak.