A cikk bemutatja, hogyan lehet miniatűr vibrorobot készíteni csináld magad. ilyen robotok bekapcsoláskor sima felületen kezdnek táncolni, körözve az asztalon. Ennek oka az, hogy a motorra kiegyensúlyozatlan súly van felszerelve, amely rezgéseket okoz. Mindenki összeállíthat egy ilyen robotot otthon, ehhez minimális készségekre és anyagokra van szükség.
Pontosabban ezt a modell A robot neve Itty Bitty volt. Itt egy régi mobiltelefonból származó vibromotort használnak, a robotot pedig 3 V-os óra-elemmel látják el.
Anyagok és eszközök robot létrehozásához:
- 3 V-os akkumulátor;
- vibrációs motor egy régi mobiltelefonból;
- egy nagy gemkapocs;
- forrasztópáka forrasztással és fluxussal;
- elektromos szalag;
- forró ragasztó;
- sötét színű jelölő.

Az eszközök közül szükség van egy fájlra, alkoholra és fogóra.
A robot gyártási folyamata:
Első lépés. Hozza létre a robot lábait
A robot lábainak létrehozása a legfontosabb pillanat ebben az egészben. A teljes robot működése attól függ, hogy megfelelően készültek-e. Mindenekelőtt a lábaknak erősnek kell lenniük, mivel rezgéssel a robot meglehetősen erősen ugrik. Egy darab huzalból készülnek. Erre a célra a gemkapocs a legmegfelelőbb. Először is egyenesíteni kell, majd 6 egyenlő részre kell osztani. Ennek eredményeként az egyes részek hossza 1/16 hüvelyk lesz.



A gemkapocs használatakor fontos szempont a mozgás simasága. Ha túl gyorsan hajlítja a kapcsot, akkor eltörhet. Ha a szögek meghaladják a 90 fokot, azokat le kell kerekíteni.
Most meg kell vennie az egyik jelölést, és 90 ° -ban meg kell hajlítania a kapcsot ezen a helyen, a másiknál pedig az ellenkező irányba kell hajlítania. Ha a kapocs vége lehajlik hajlítás közben, ez nagymértékben csökkenti a törés valószínűségét.



A harmadik jelölésnél 90 fokos kanyart kell tennie, de a kanyar helyének a lehető legtávolabb kell lennie a végétől.
A negyedik jelölésnél 180 fokos kanyar készül, a végnek hátul kell lennie.
Az ötödik lábon 90 fokos behajtás történik, amelynek a lehető legtávolabb kell lennie a másik két szomszédos lábtól. Összefoglalva: a lábakat úgy kell beállítani, hogy mindenki ne érje egyenletesen a padlót.


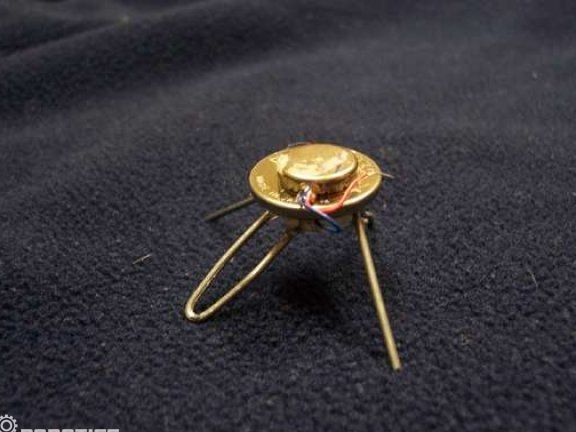
Második lépés Motor beszerelése
Az akkumulátor támogató elemként szolgál egy ilyen robotban. Vedd be a tremokle-t, és ragassz rá egy vibro-motort. Ezt követően az egyik motorvezetéket meg kell forrasztani az akkumulátor érintkezőjéhez, ez lesz a felső érintkező. A forrasztás lerakásához az akkumulátort kissé meg kell karcolni, ezt meg lehet tenni egy fájllal.

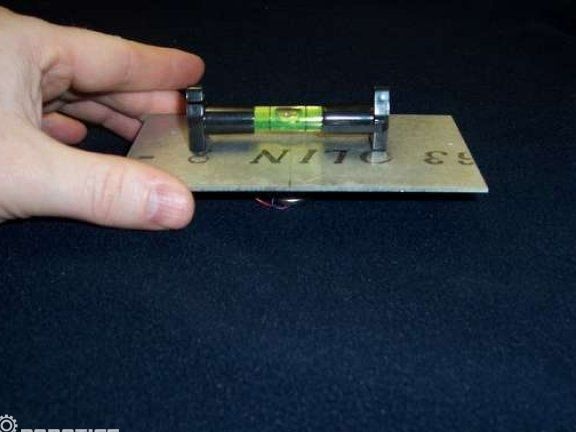
Harmadik lépés Ragasztja a lábad
Most már csak a lábát kell a robothoz ragasztania. Ehhez az akkumulátort az asztalra kell helyeznie, és rá kell helyeznie a robot lábait. Ezután a lábakat le kell nyomni, ehhez egyenes szintet vagy alumíniumdarabot lehet felvisszük a lábakra. A ragasztó felhordása előtt tanácsos az akkumulátor felületét zsírtalanítani alkohollal. A ragasztót nem kell megbánni, mivel a lábakon végzett munka során egy elég nagy erő hat. Ha rosszul tapad a láb, akkor a robot működés közben széteshet.
A robot futtatásához nem kell rohanni, a ragasztót meg kell szilárdulni. A szerző azt javasolja, hogy a munkadarabot hűtőszekrénybe helyezzék, így a ragasztó gyorsabban megszárad.


Ez minden, a robot készen áll, és ellenőrizheti. A robot bekapcsolásához el kell vennie egy darab elektromos szalagot, és be kell ragasztania a motor második vezetékét az akkumulátor csatlakozójára. A robotot sima asztalra helyezve megfigyelheti, hogy mit fog tenni.