


Anyagok és szerszámok az összeszereléshez:
- forgó vezérlő;
- intel Edison vele Arduino Breakout Board
- I2C PWM illesztőprogram;
- valós idejű óra kitörés;
- mini I2C OLED;
- két szervó;
- Három szervó fém fogaskerekekkel;
- két vezeték egy 30 cm hosszú szervohajtáshoz;
- csatlakozóaljzat dugóhoz;
- kétállású kapcsoló;
- kefe és fogkrém;
- tápegység 5 V 3A-ra;
- műanyag fecskendő;
- anyák és csavarok;
- anya és menetes rúd;
- egy átlátszó akrildarab, amelynek mérete 61 cm x 61 cm x 3 mm;
- 91 cm x 61 cm x 6 mm méretű rétegelt lemez;
- 3D nyomtató.
Robot összeszerelési folyamat:
Első lépés. Mechanikus rész
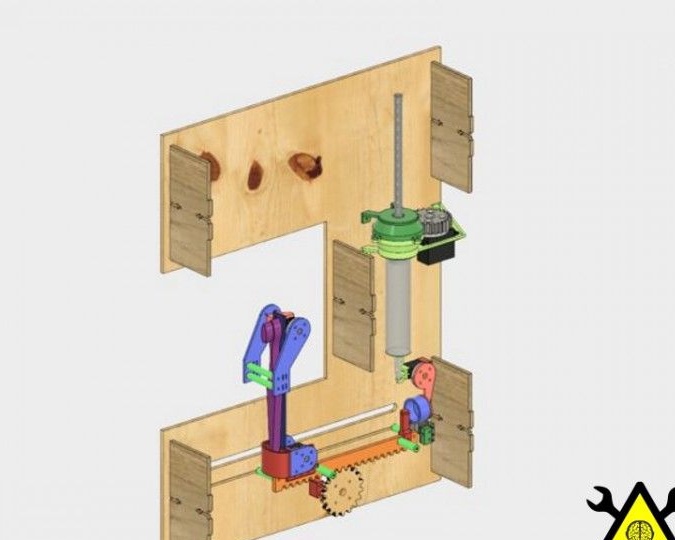
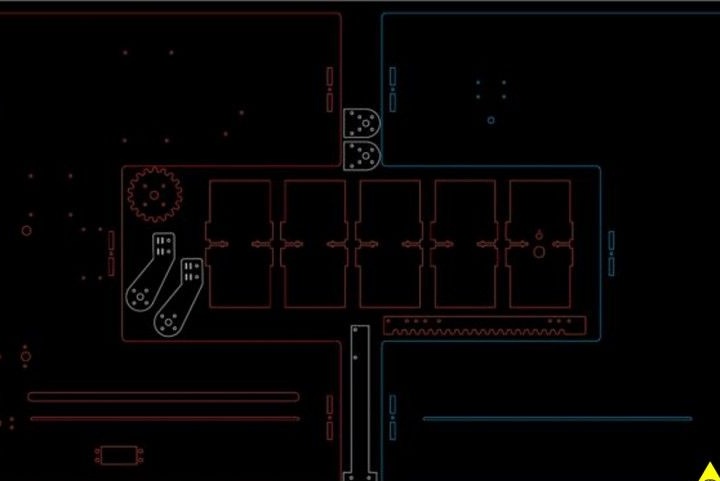
Az eszközt először a Fusion 360 és az Illustrator kombinációjával modellezték. A folyamat során egy teljes technológiát hoztak létre, amely magában foglalja a 3D nyomtatást, valamint a fém lézervágását. Összességében a rendszert négy fő csomópontra lehet felosztani. Ez magában foglal egy kocsit, egy fogkefe-tartót, egy fő testet és egy adagolót.
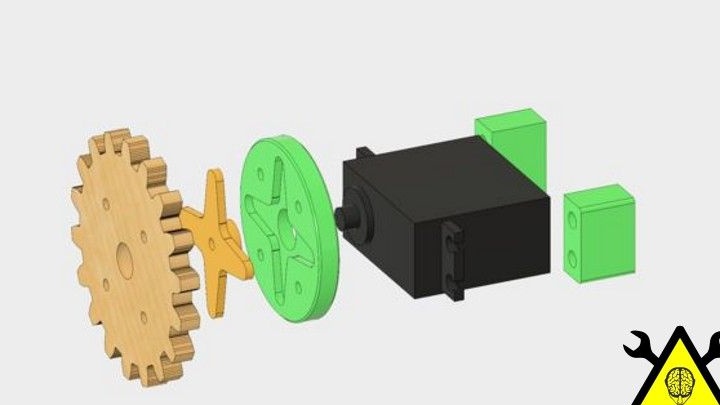
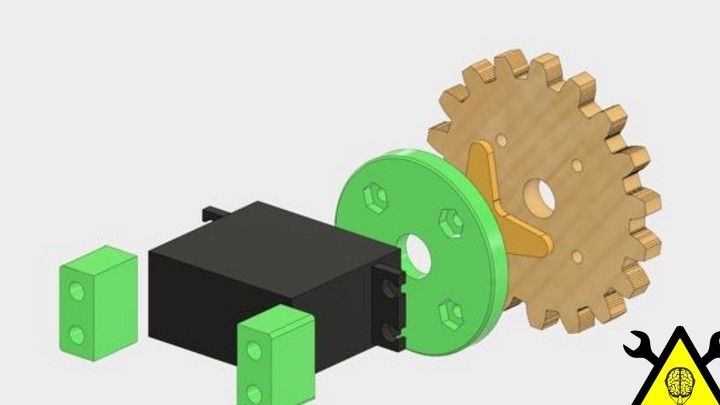
Annak érdekében, hogy a házi készítésű termékeket szélesebb körű igényekhez lehessen felhasználni, úgy döntöttek, hogy adaptereket modelleznek a standard és a mikro-szervoszközökhöz. Ezeknek az adaptereknek vannak nyílásaik a szabványos tengelyek rögzítéséhez, valamint négy hátsó anya számára van hely. Mivel az adaptereket tengelyekre tervezték, azokat vagy a lemezekhez, vagy más tárgyakhoz kell rögzíteni.

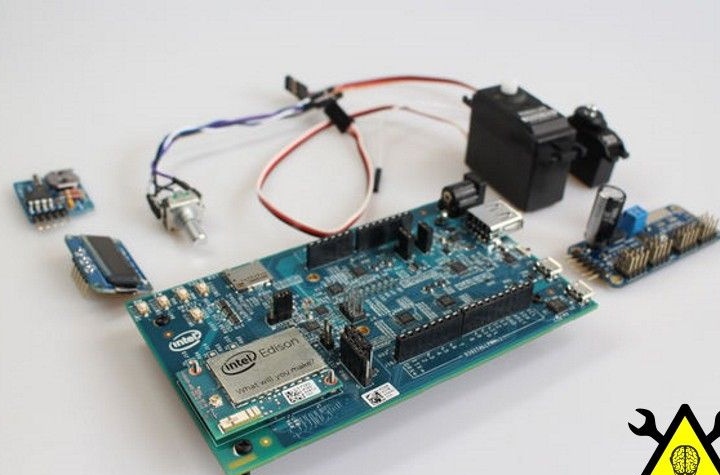
Második lépés A készülék elektromos áramköre
Tápfeszültségként 5 V és 3A forrást használnak. Ez elegendő egy motor hajtásához. Az alaplap körülbelül 500 mA-t fogyaszt, és a motorhajtások, az eredeti LED és a valós idejű óra kis mennyiségű áramot fogyasztanak.
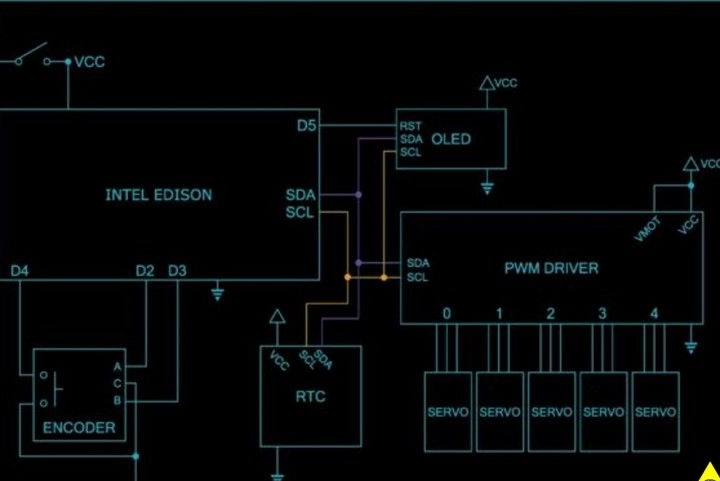
A rendszer fő vezérlője az Intel Edison processzor. A táblák elválasztása miatt a processzor könnyen kommunikálhat az elektronika más alkatrészeivel. A tábla csatlakozik a motorhoz, az órához és a képernyőhöz.
Az öt szervó vezérléséhez PWM kártyát használnak. A motorok teljesítményét külső forrás segítségével vezérelhetjük, de a szerző úgy döntött, hogy a Vmot-ot a VCC-csaphoz köti.Ennek köszönhetően az egész rendszert 5 V-os tápellátás biztosítja.
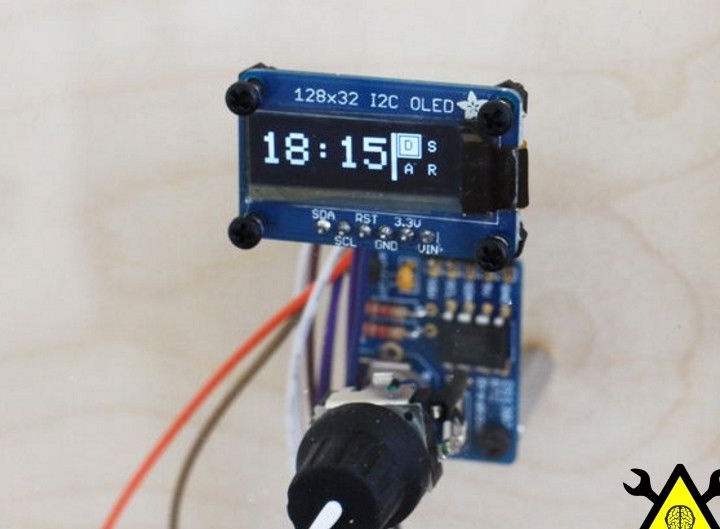
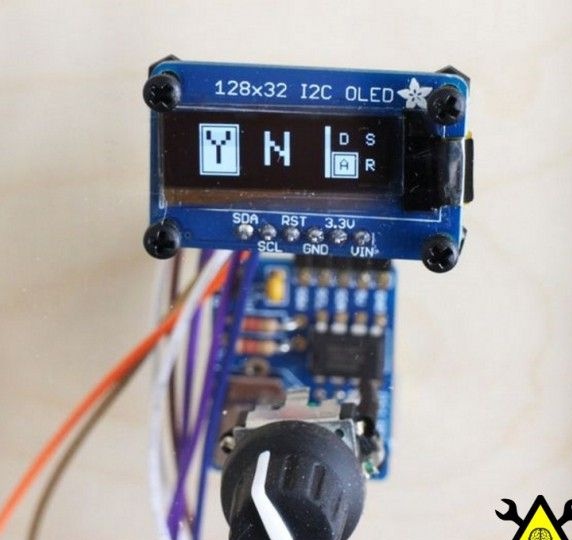
Annak érdekében, hogy az eszköz vezérelhető legyen, egy kicsi, 128 x 32 méretű kijelzőt kell használni, amelynek fő forrásaként egy forgó érzékelő szolgál. Az érzékelő kimenetei a processzor digitális érintkezőihez vannak csatlakoztatva.
Harmadik lépés Karosszéria összeszerelés
A hátsó rész a ház tartójaként szolgál, 6 mm vastag rétegelt lemezből készül. Négy csavart használunk a PWM és a processzor rögzítéséhez. Az Edison elülső oldalán, a hátán PWM van felszerelve.
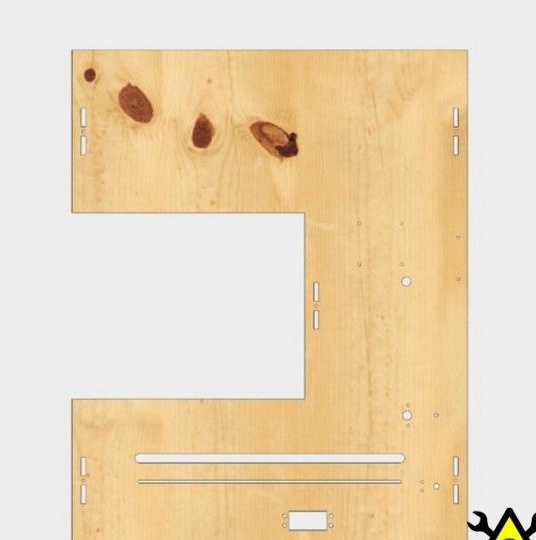
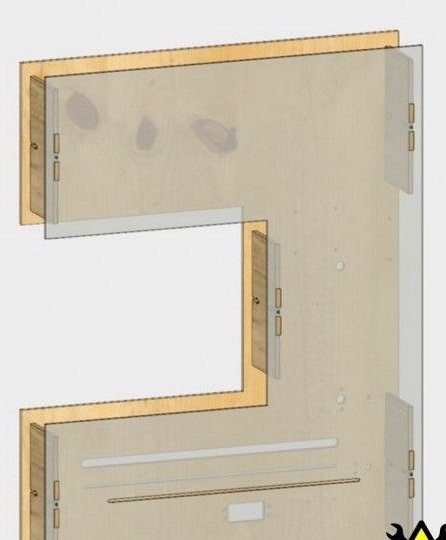
Öt távtartó lapot használunk az elülső és a hátsó panel összekapcsolásához. A távtartókat csavarokkal és megfelelő anyákkal rögzítik a lemezekhez. A lemezek szinte szimmetrikusak, de az egyik szélüknél a kiemelkedések rövidebbek, nem terjednek előre. A kapcsolót és a tápcsatlakozót az alsó támaszra kell erősíteni.

Ami az előlapot illeti, ez főleg az eszköz működés közbeni védelme érdekében szükséges. A képernyő rögzítéséhez négy csavart használunk, a forgó érzékelőt anyákkal is rögzítjük.
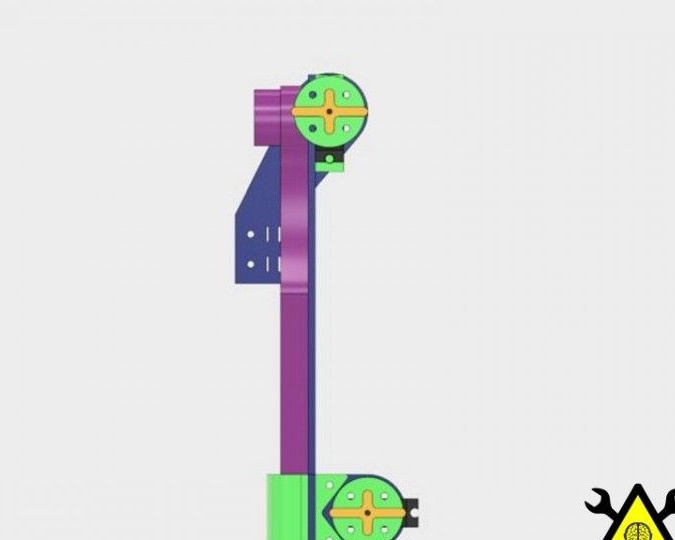
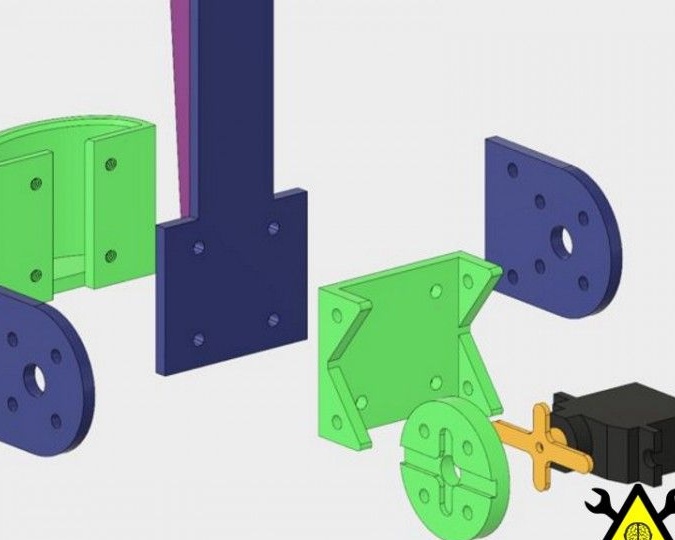
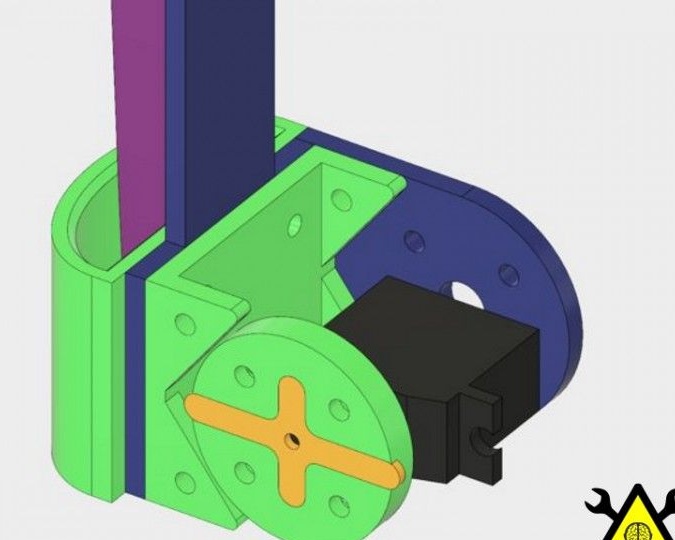
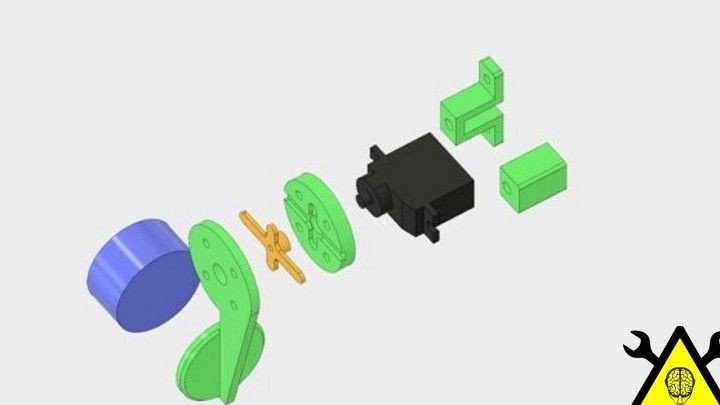
Negyedik lépés Fogkefe tartó
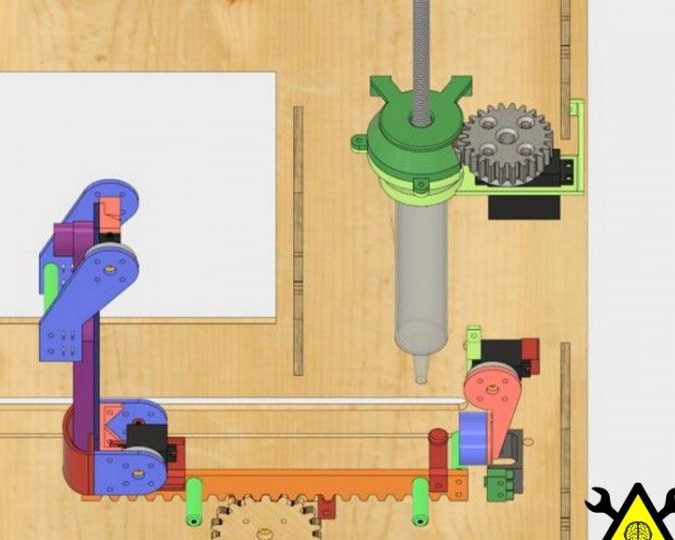
A fogkefe-tartón két szervó található, amelyeket az alkatrészek hajtanak - az alap és a „fej”. A képen láthatja a kék és a zöld elemeket. Amit egy lézervágóval vágtak, az kék színű, a 3D nyomtatóra nyomtatott elemek pedig zöld színűek.

A fejnek köszönhetően a fogkefe nem esik le. A kezeket egyetlen szervohajtás hajtja meg, két tömítéssel vannak rögzítve. 3D-s adaptert és két csavart használnak a szervomotor rögzítéséhez az alaplaphoz. A tányéron négy nyílás található, rajtuk keresztül fekete gumiszalagok segítségével fogkefe van rögzítve.
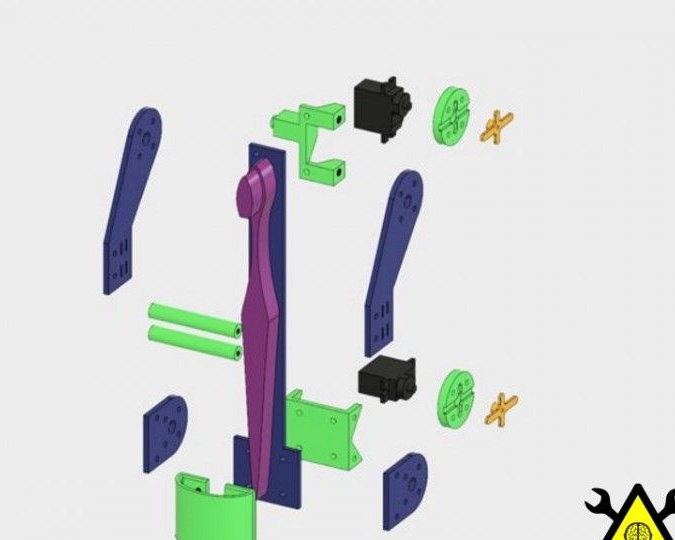
Az alap egy kicsi 3D-s csésze, amely megakadályozza a kefe leesését. Miután a fogkefét behelyezték a szerelvénybe, a szervómeghajtó tartja azt és lefordul. Nyolc csavart használnak a lemezek összekapcsolásához.


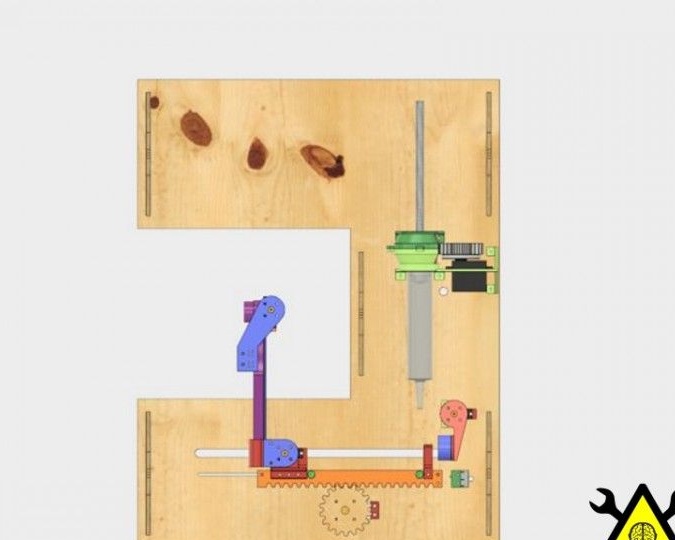
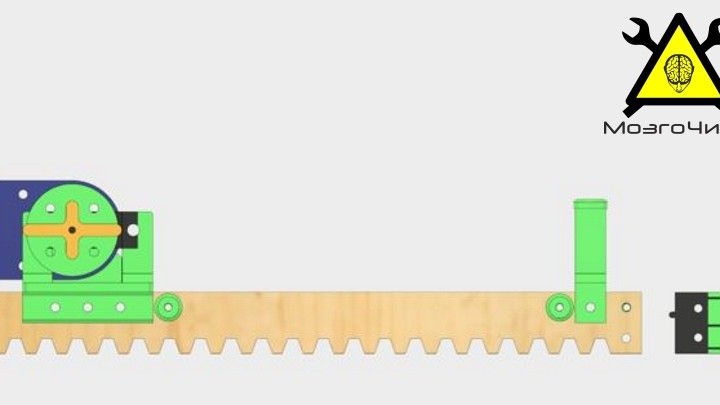
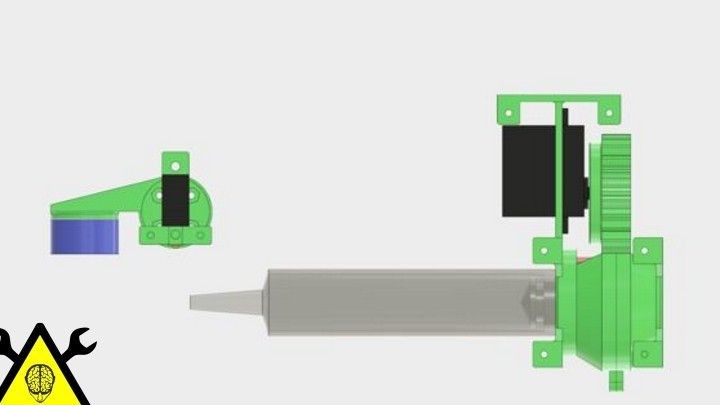
Ötödik lépés Sínre szerelés
A keret három egyedi részből áll, ez egy fejtámla, kocsi és rugók. A kocsi segítségével a kerettartót rögzítik. Maga a kocsi három csavarral van rögzítve. A fejtámaszra a főszervtartó terhelésének csökkentése érdekében van szükség, azt tovább szerelik a vázon lévő kocsira.
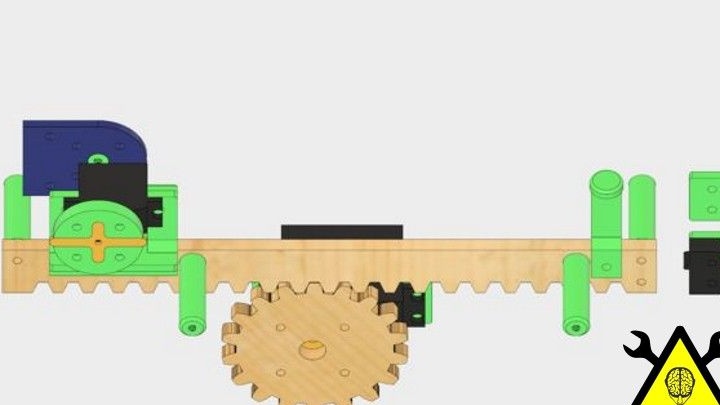
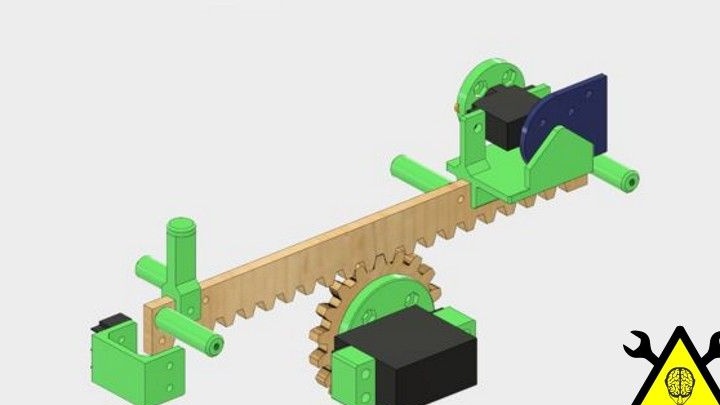
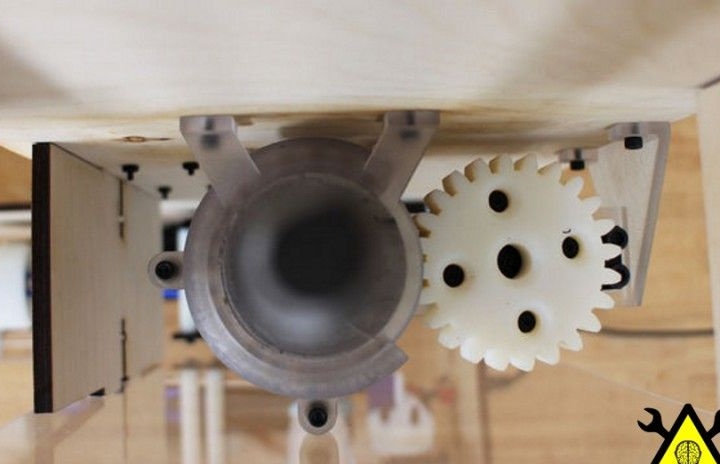
A sebességváltó a keret alá van felszerelve. Kivágják 6 mm vastag rétegelt lemezből és egy standard szervótengelyhez rögzítik. Maga a szervóhajtás kissé eltolódik az alaplemeztől, ezzel kapcsolatban azonos téglalap alakú támaszok vannak rajta. Maga a szervó négy csavarral van rögzítve az alaphoz.
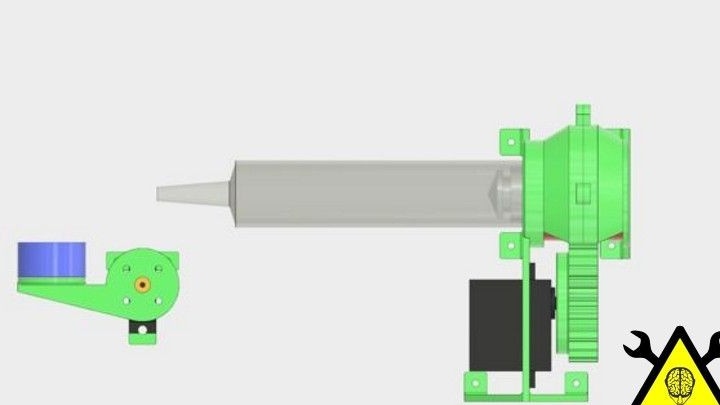
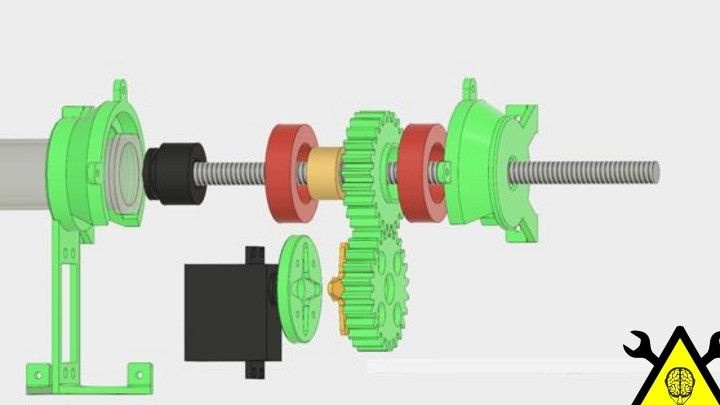
Hatodik lépés Az adagoló felszerelése
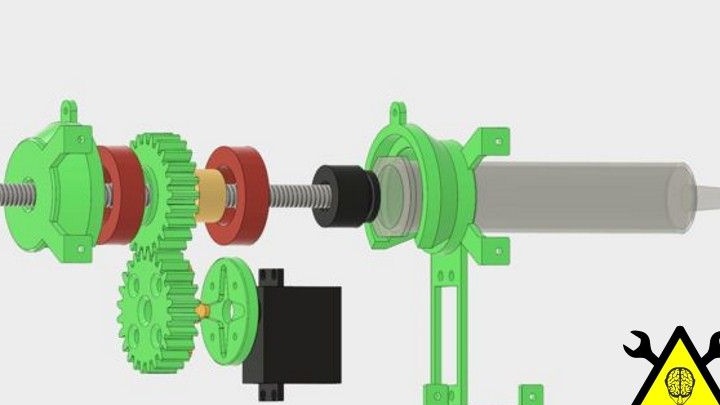
A készülék legbonyolultabb mechanizmusa a lineáris hajtás. Hála neki, a paszta adagolása megtörténik. Az eszköz magja egy menetes rúd és egy anya, amelynek segítségével a csövet összenyomják. Hat csavart használunk a meghajtó rögzítéséhez.
Hetedik lépés. szoftver
Összességében a program három funkcióval rendelkezik: az idő beállításával, az "riasztás" beállításával, valamint az eszköz indításának funkciójával.
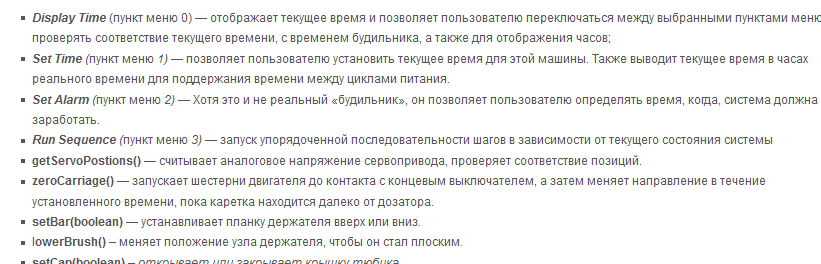
Ez minden, miután villogott és beállította az eszközt használatra kész.