


De először derítsük ki, mi ez és miért van szüksége erre. Valójában a neve megmondja szándékát. A curvus latin szóból származik, amely görbe vagy hullámos jelentést jelent. Vagyis egy görbületmérő kerék vagy görgős távolságmérő. Kétféle görbemérőt különböztetünk meg: kicsi (térképészeti), amelyeket általában a térképen történő mérésekhez használnak, és nagy (út), amelyeket általában a már autópályák ívelt szakaszának hosszának mérésére használnak. Használhatók bárhol, ahol kényelmetlen vagy lehetetlen mérni a szokásos ruletttel, ezért a projekt érdekesnek ígérkezik.
A görbemérő felépítésekor elsőként vigyázzon egy kerékre vagy hengerre. Elég kicsinek kell lennie, hogy a műszer pontossága magas legyen, ugyanakkor elég nagynak is, hogy a mért felület érdességét ne befolyásolja nagymértékben a leolvasás értéke. Az én esetemben a kerék átmérője 14 centiméter.

Most meg kell határoznia a szerkezet anyagát és méretét. Használtam egy fát.

A rúdon megjelöltem és elvégeztem a szükséges vágásokat és lyukakat.

Aztán kis öncsavarokkal csavaroztam a megmunkált alkatrészeket.
Most nézzünk egy kicsit maga a görbemérőtől, és gondolkodjunk azon, hogyan lehet ez a dolog meghatározni a távolságot? Minden nagyon egyszerű. Csak ki kell számolnunk a kerék fordulatának számát, és szoroznunk kell annak külső kerületének hosszával, és még könnyebb a hosszérték hozzáadása minden egyes alkalommal, amikor a kerék újabb fordulatot hajt végre.
Az egyes fordulatok legegyszerűbb számításához használhatja a „csúszó érintkezőt”. Nem javaslom azonban ilyen referencia-mechanizmus alkalmazását. Sokkal jobb nádkapcsolót vagy Hall-érzékelőt használni.
Ideje kipróbálni a kormányon. Rögzítem egy hosszú csavarral. Megtalálunk egy helyet a kereten, ahol a kerékperem a lehető legközelebb van, és ütésekkel jelöljük meg. Ezen a területen körül kell telepíteni a nádkapcsolót.

A kerékre telepíteni kell egy kis mágnest.Ügyeljen arra, hogy az ereje elegendő legyen a nádkapcsoló érintkezőinek zárásához.
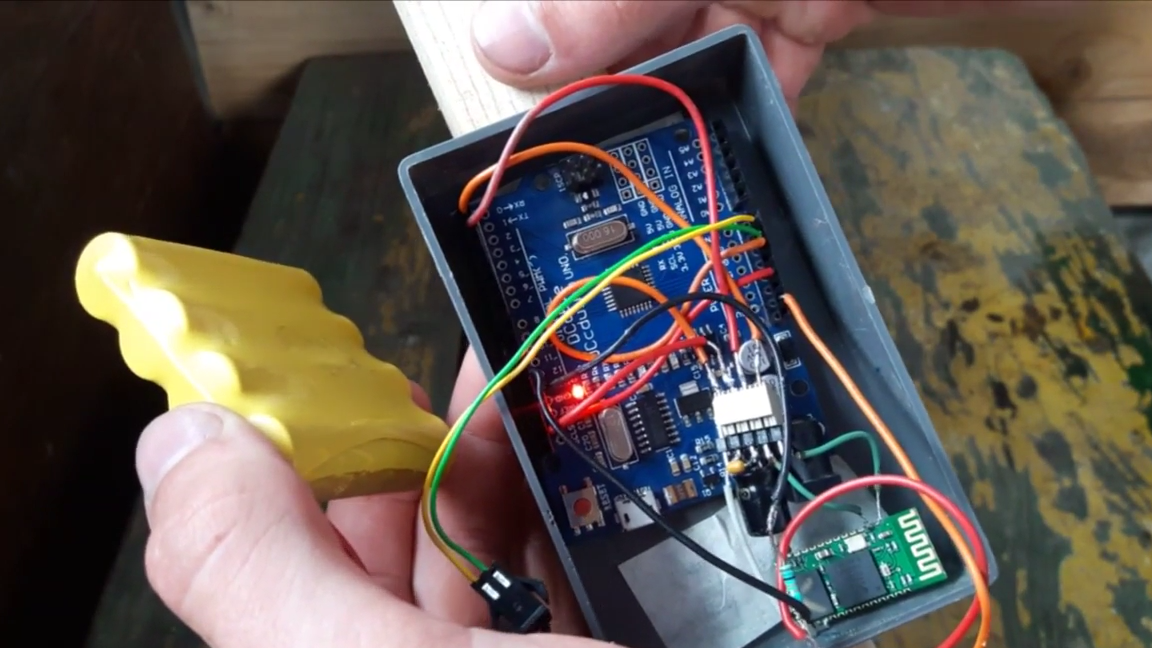
Most részt veszünk a rendszer "agyában". Saját esetemben ez díj Arduino UNO. Kiolvassa a nádkapcsoló állapotát, és Bluetooth-kapcsolaton keresztül továbbítja az adatokat a HC-05 modul segítségével a telefonra. Mellesleg, a nádkapcsoló normál gombként van csatlakoztatva a táblához. Úgy gondolom, hogy a Bluetooth modul csatlakoztatásával nem lehet gond.
Ami a kódot illeti, ez nagyon egyszerű. És megpróbáltam megjegyzést fűzni ahhoz, hogy minden a lehető legtisztább legyen.
int gercon = 12; // a nádkapcsolót 12 tűsre csatlakoztatta
kettős távolság = 0; // kettős változót hozott létre a távolság tárolására
érvénytelen beállítás () {
Serial.begin (9600); // soros kapcsolatot csatlakoztatott
}
void loop () {
/ * A következő az if hurok. Ha a nádkapcsoló zárva van, akkor a következő távolságszámítást kell elvégezni. Az 0.46472 érték már a kerék egy fordulatának kiszámított hossza. Az "extra" adatok elkerülése érdekében adjon hozzá 200 milliszekundum késleltetést, és jelenítse meg a leolvasott értékeket
* /
if (digitalRead (gercon) == HIGH)
{
távolság = távolság + 0,46472;
késleltetés (200);
Serial.println (távolság);
}
} 
Itt van a görbemérőnk és készen állunk!
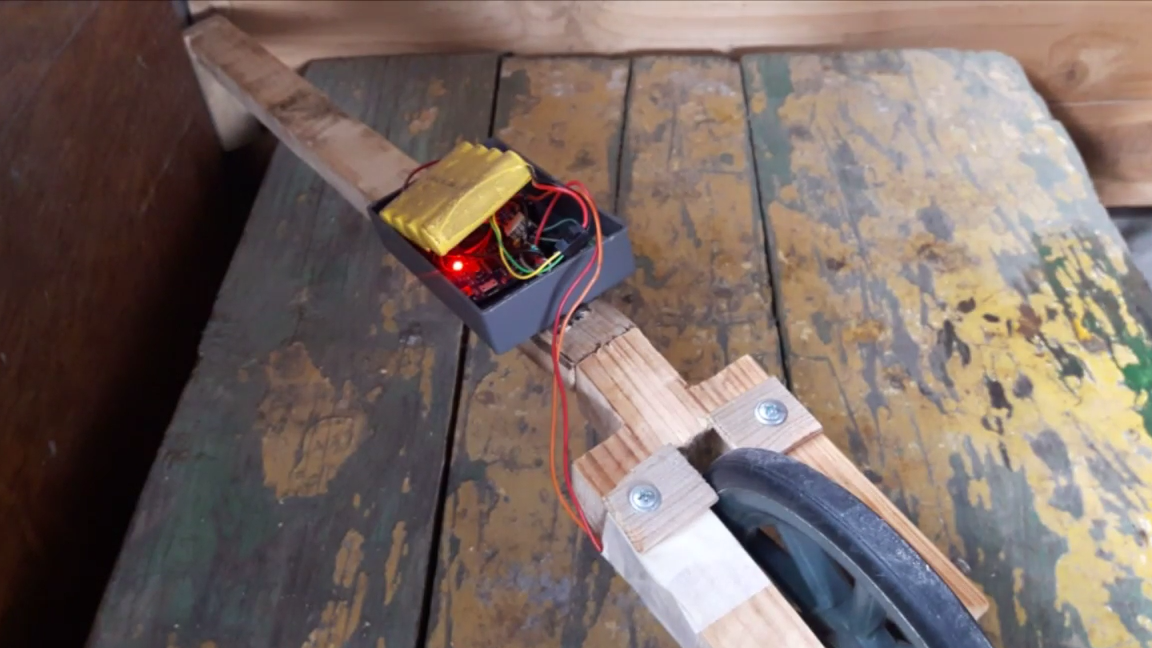
Készítsünk egy pár tesztversenyt. Minden remekül működik!

Megnézhet egy videót az eszköz összeszereléséről, talán talál valami érdekeset.
[media = https: //youtu.be/kx_7ztPsLws]
Jó ismétlést a projektben!