


Tehát, lego technikát veszek a fiamtól, és otthon Arduino Nano elkezdte kombinálni ezeket a tervezőket.
Szükségünk lesz:
- Lego Technic (42029 és 42033 szett)
- Arduino Nano (link a fórumhoz)
- DRV 8833
- 2 szervohajtás az SG-90-et
- IR vevő
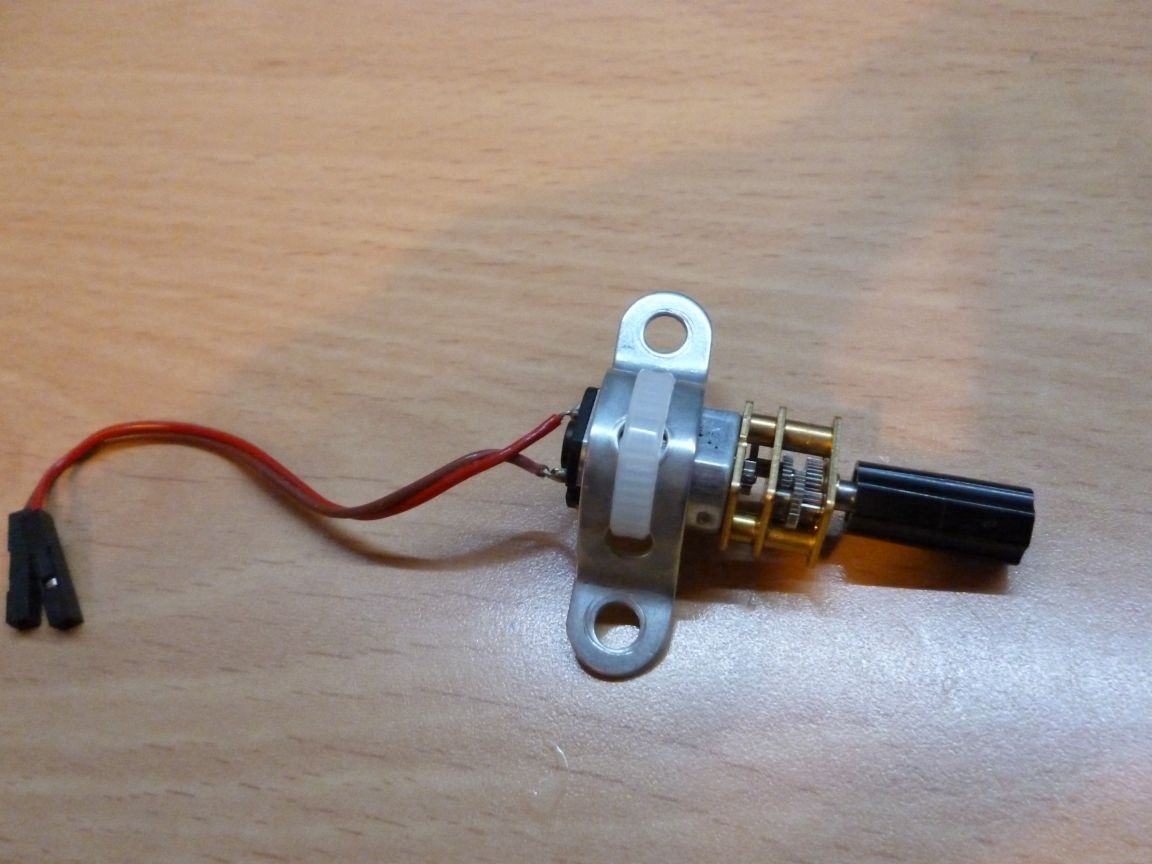
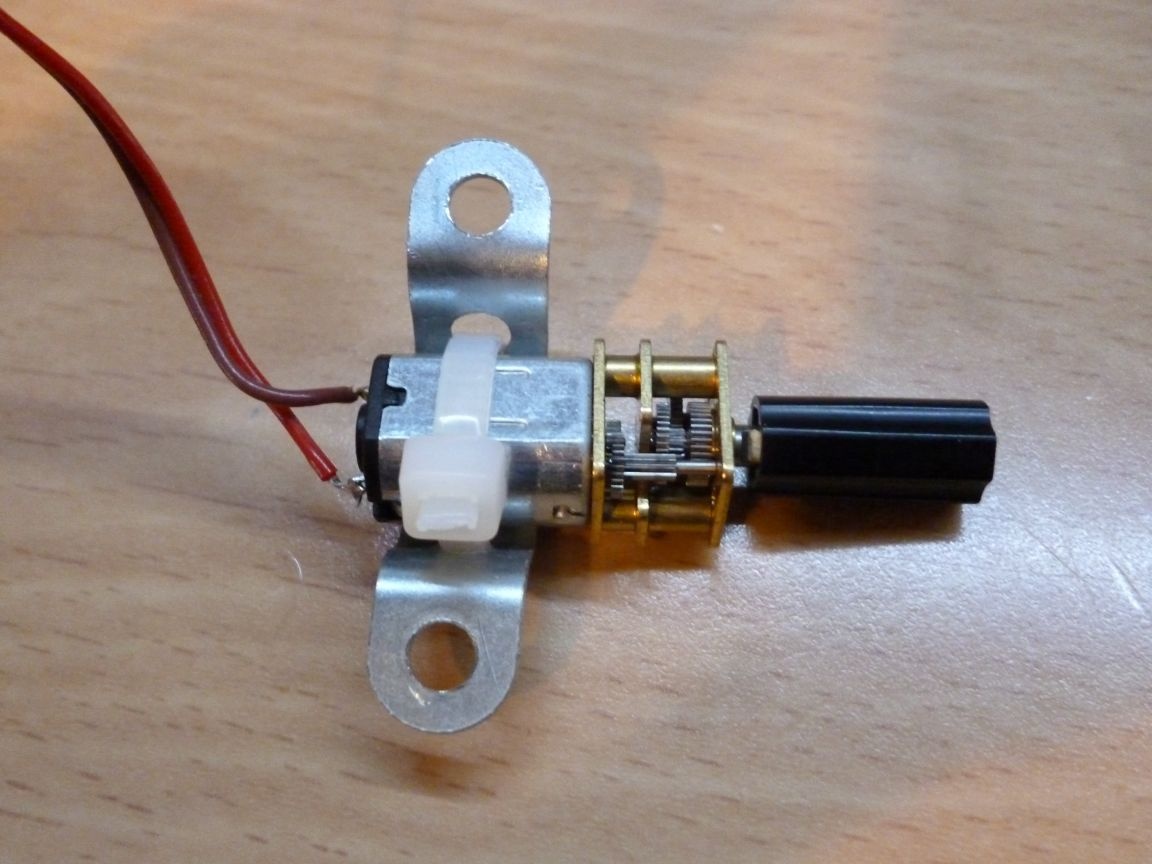
- sebességváltó motor
- 2 LED
- 2 ellenállás 150 ohm
- Kondenzátor 10v 1000uF
- 2 egysoros fésű PLS-40
- 2 PBS-20 csatlakozó
- Induktor 68mkGn
- 4 NI-Mn 1.2v 1000mA elem
- Csatlakozó apa-anya két érintkezővel a vezetékhez
- Homutik
- Különböző színű vezetékek
- forrasztható
- Rosin
- forrasztópáka
- 3x40 csavarok, anyák és alátétek számukra
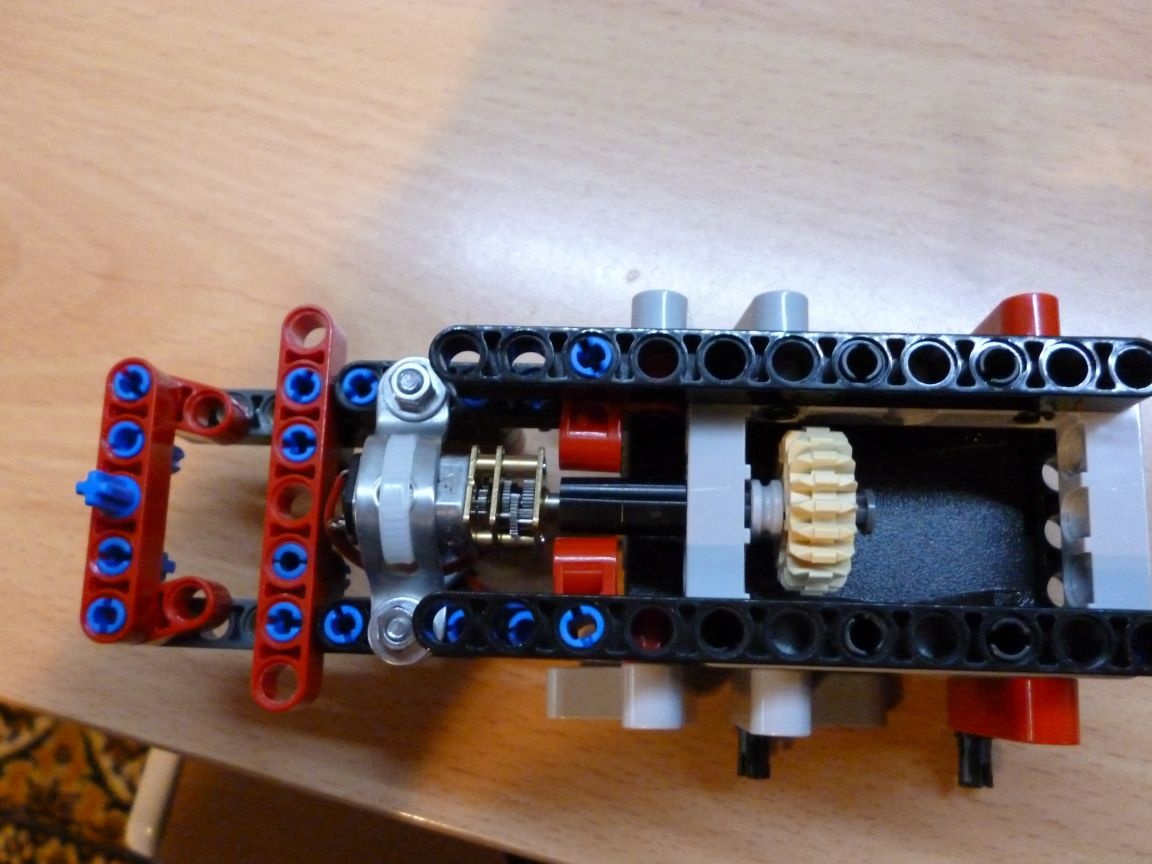
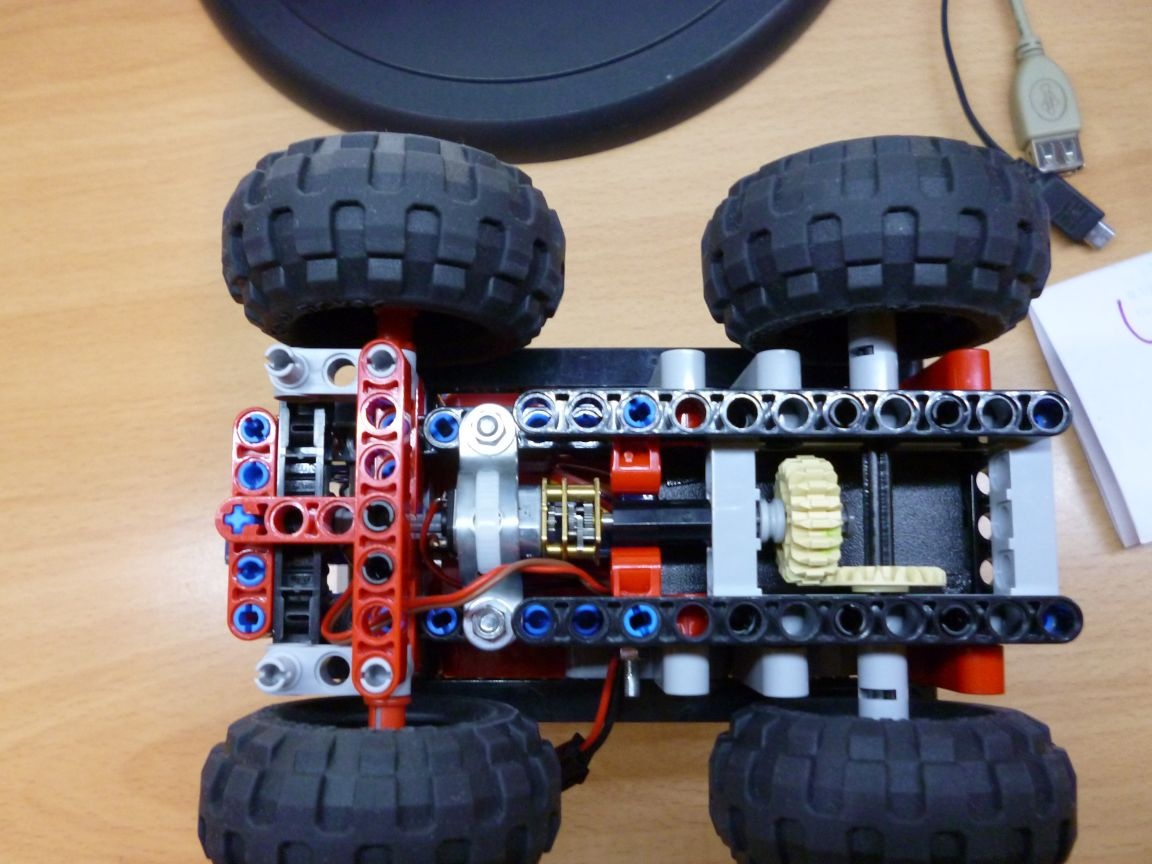
1. lépés: szerelje össze az alvázot és a hajtótengelyt.
Bármilyen alvázot a Technic-től össze lehet szerelni, amúgy is, ez kiderült.
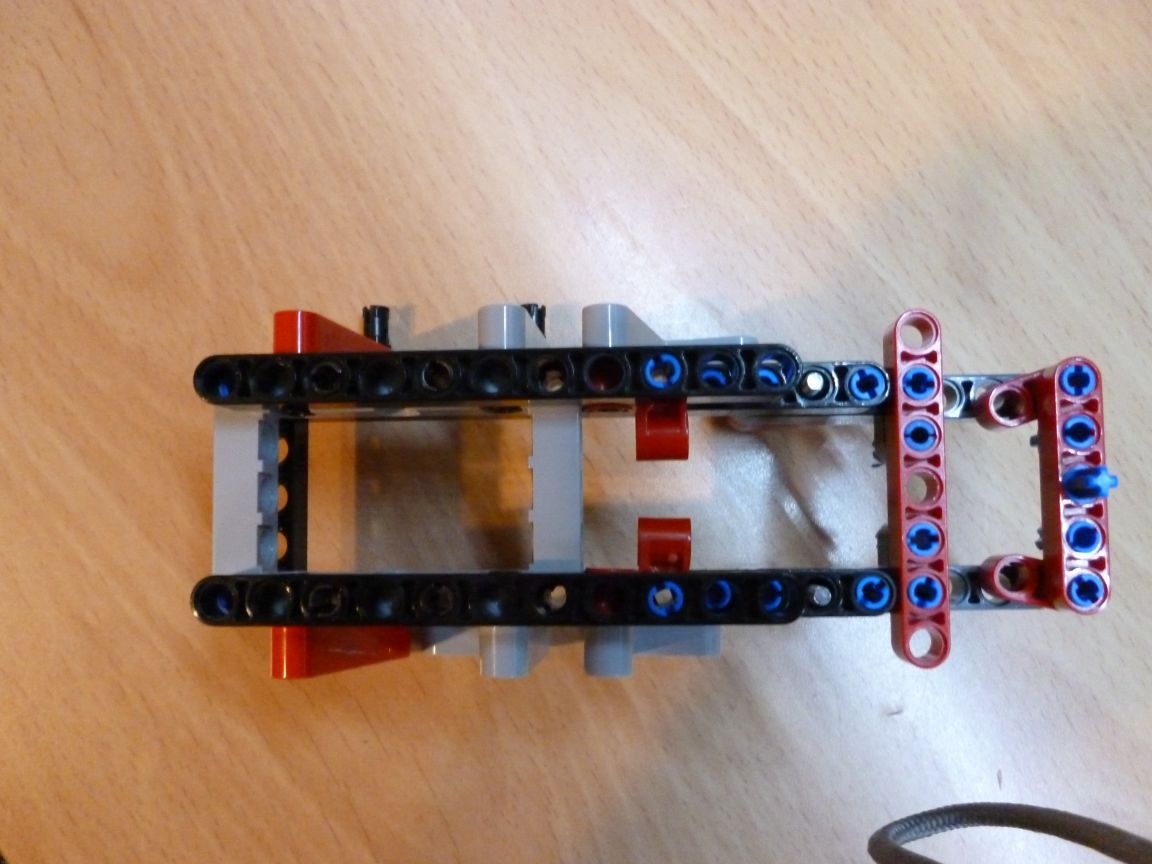
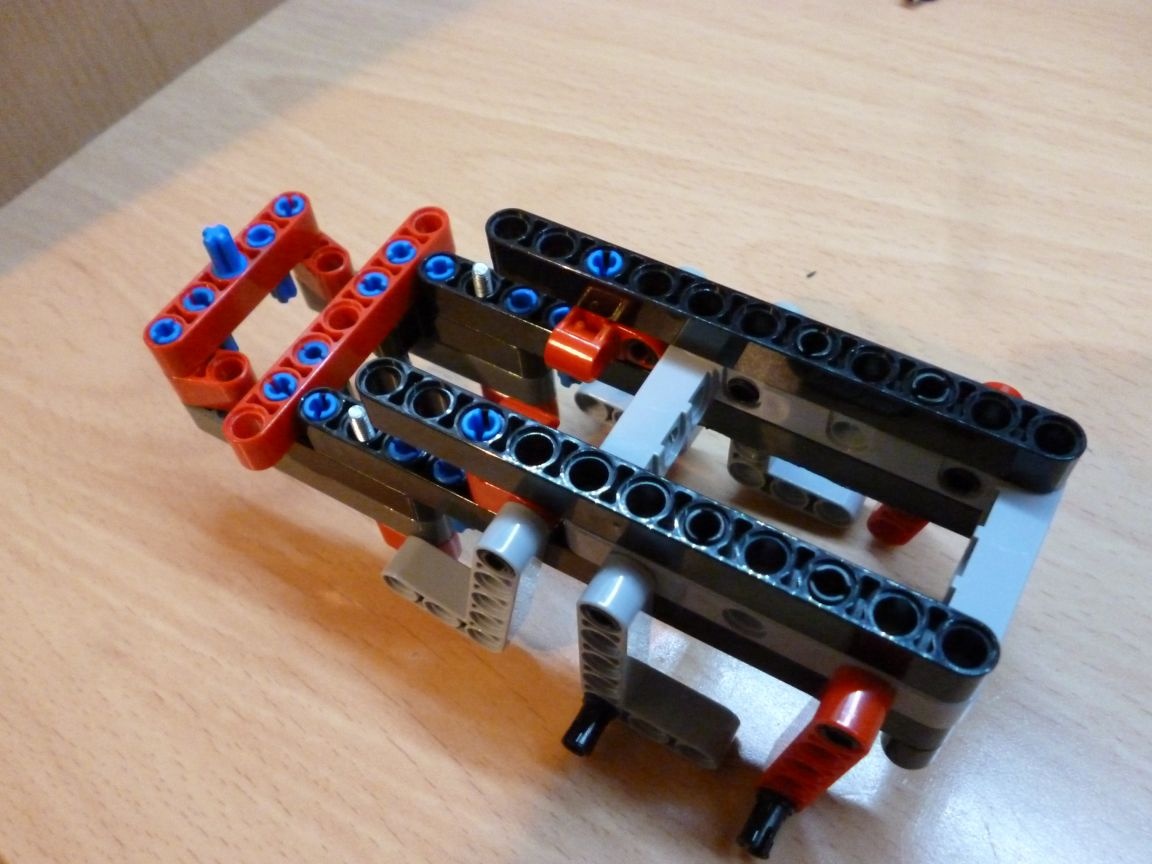
Csak a hajtómotor és a tervező alkatrészei közötti összeköttetés problémája van. A következőképpen döntöttem: tettem a hajtómotor tengelyére összekötő hüvelyt, és helyezzen egy darabot egy gyufatartó rögzítésre. A hajtómotor felszereléséhez használt vastervező fém műanyagból és bilincsből áll. Kiderült, hogy a következő:
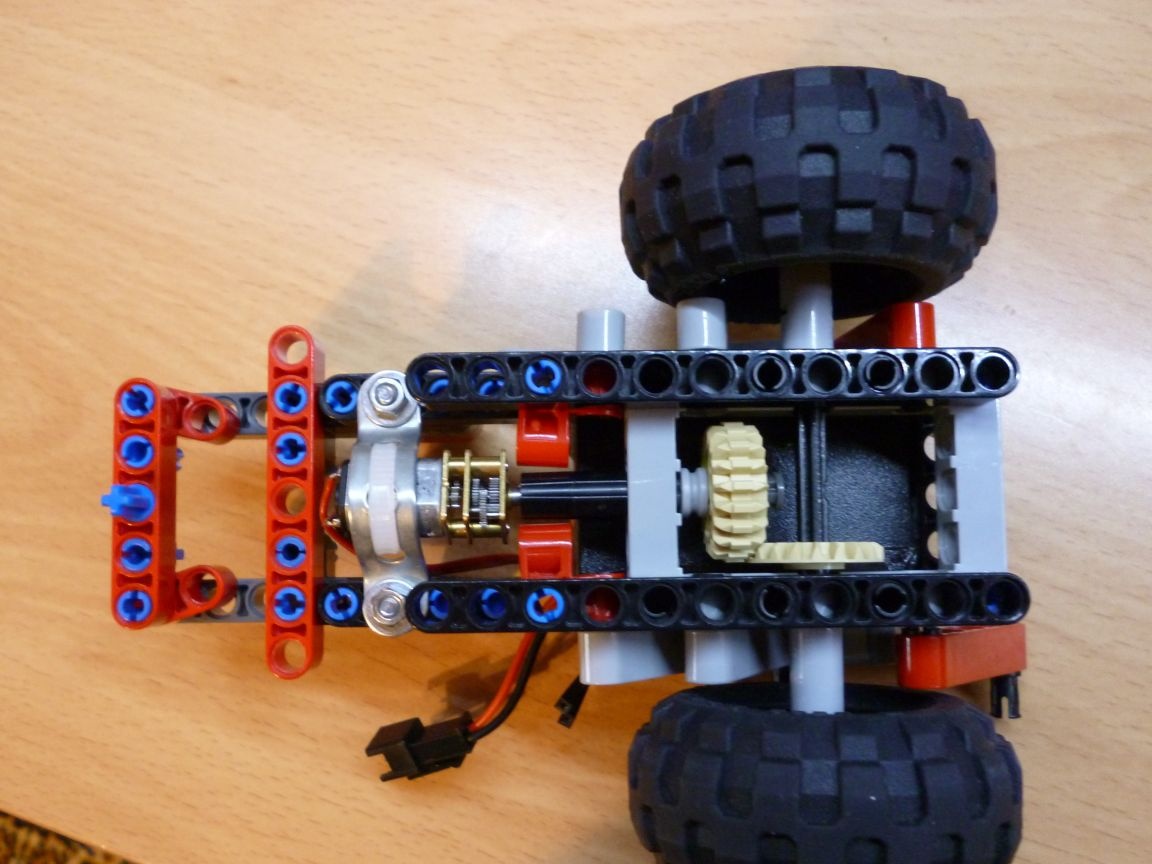
Ezután a kapott kialakítást 3x40 csavarokkal telepítjük az alvázra:
És tedd a kerekekre:
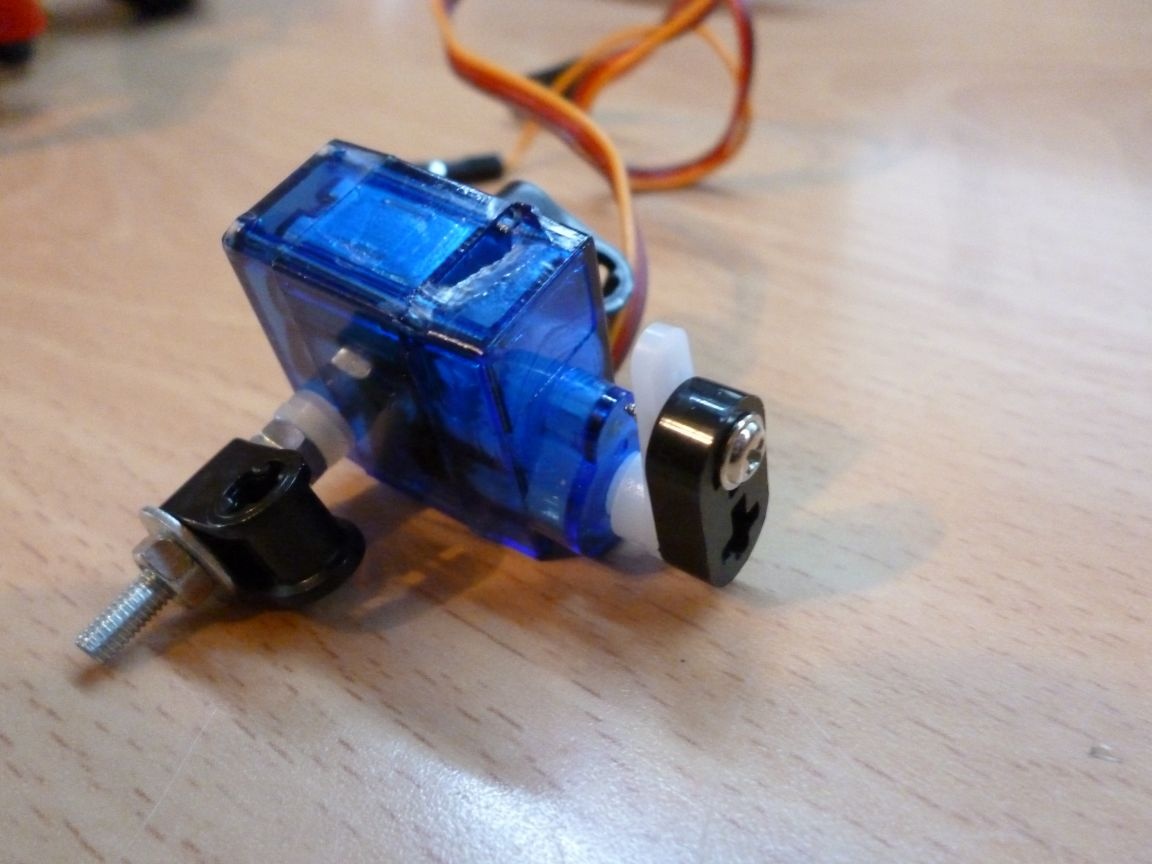
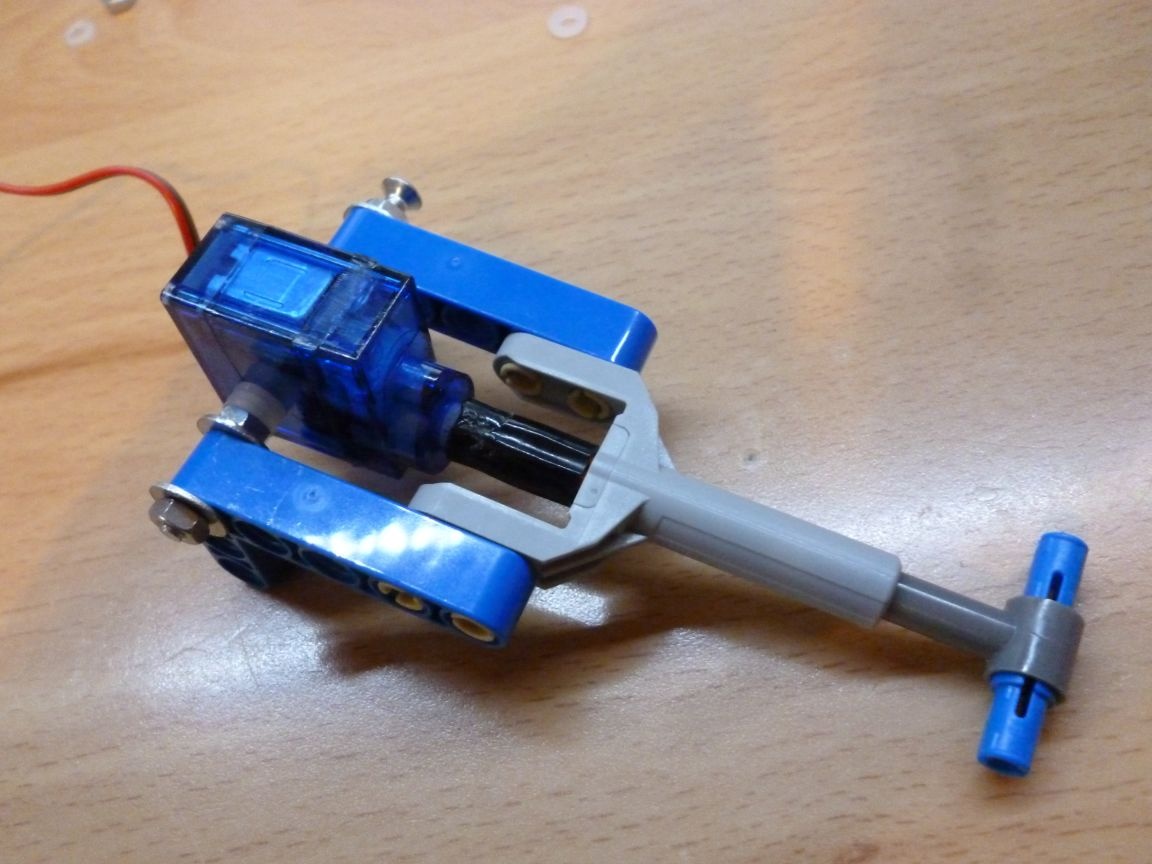
2. lépés forgó kerekek
A forgatás elvégzéséhez az SG-90 szervót vettük igénybe. Óvatosan fúrni kell, hogy ne érintse meg a belső részeket, egy 3,2 mm átmérőjű átmenő lyukat vagy csak levágni egy levélpapír kés segítségével.

Helyezzünk egy csavart a készített lyukba, és a sarkokat a szélek mentén, és rögzítsük anyákkal:

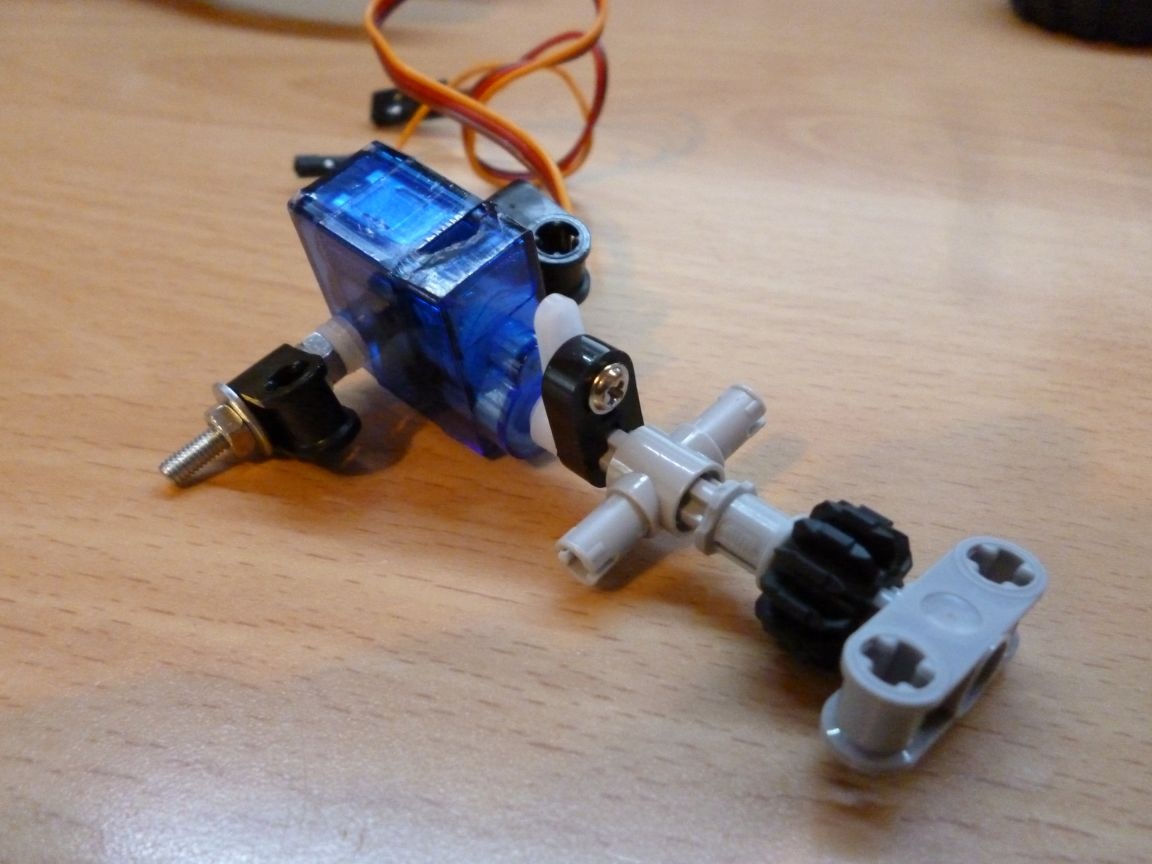
A szervótengelyre felteszünk egy kart egy lego csavarozott elemmel:
És végül a forgó szerelvény:
Feltettük az alvázra:

Helyezze fel a kerekeket:
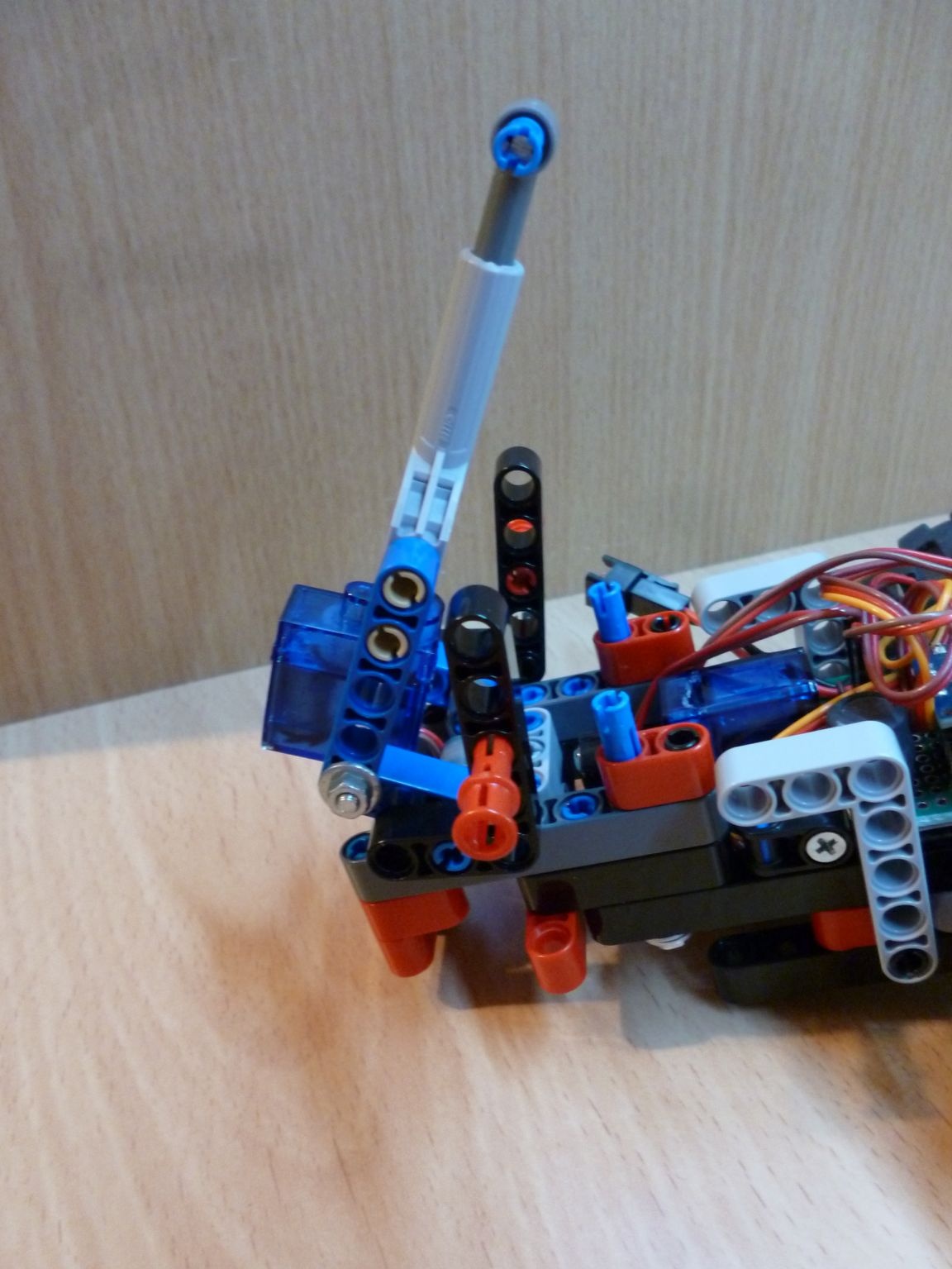
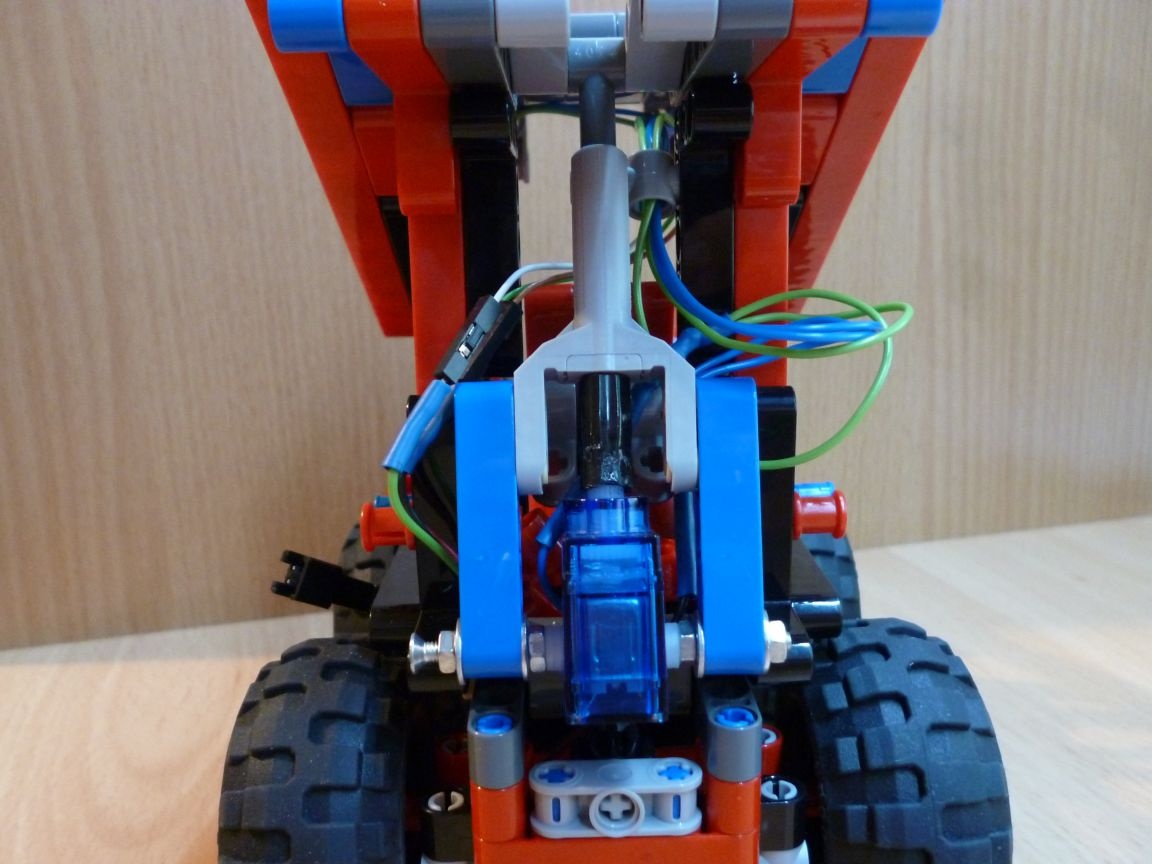
3. lépés emelő.
A vödör felemeléséhez egy módosított SG-90 szervót vettünk igénybe. A módosítás lényege, hogy eltávolítja a belső vezérlőt, és közvetlenül a motorhoz forrasztja a vezetékeket annak érdekében, hogy a hajtóműves motort ki lehessen hozni a szervómeghajtásból, azaz hogy teljesen forogjon. Az első szervón túlmenően átmenő lyukat kell készíteni a felszereléshez:
Telepítés az alvázra:
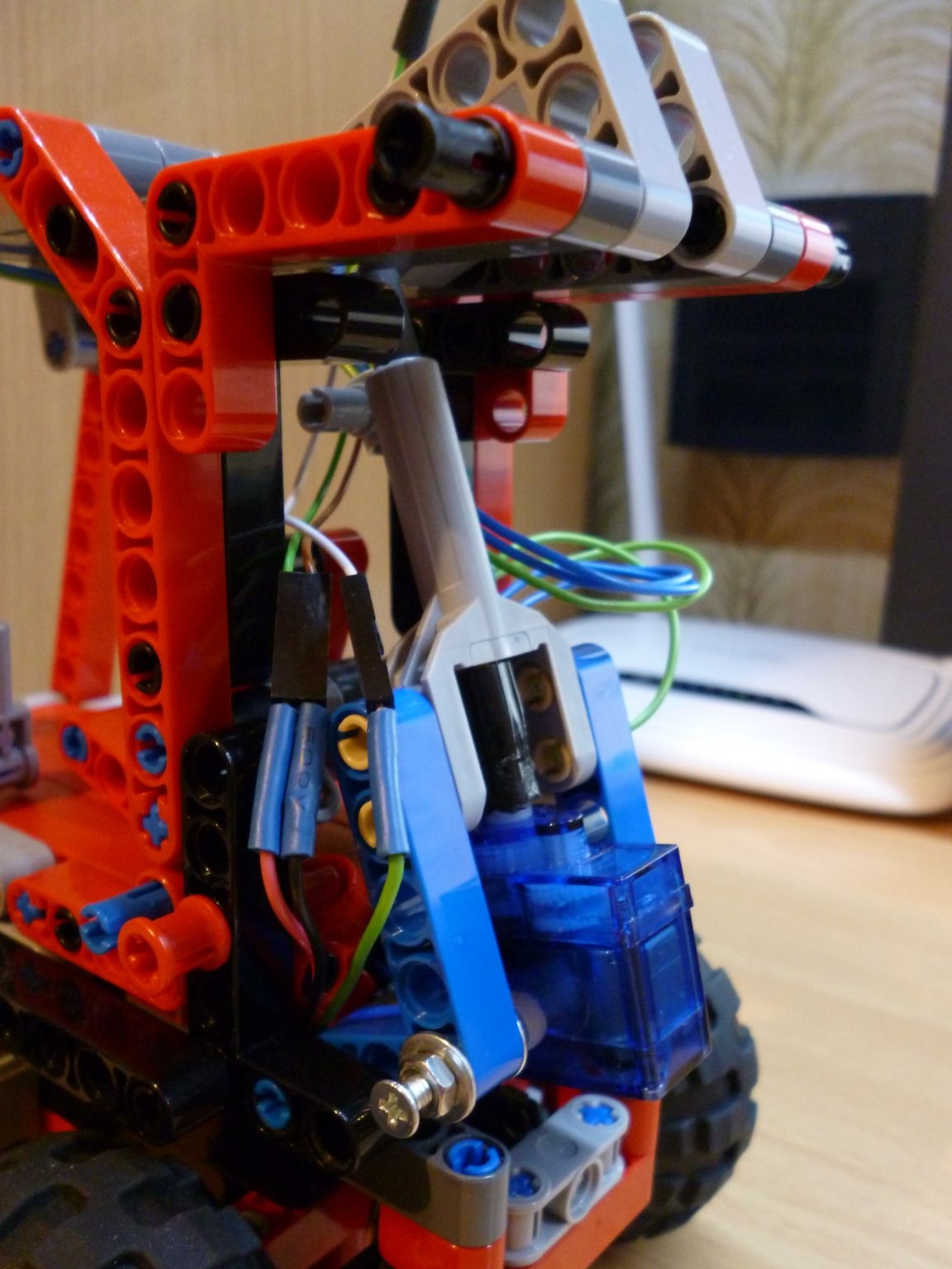
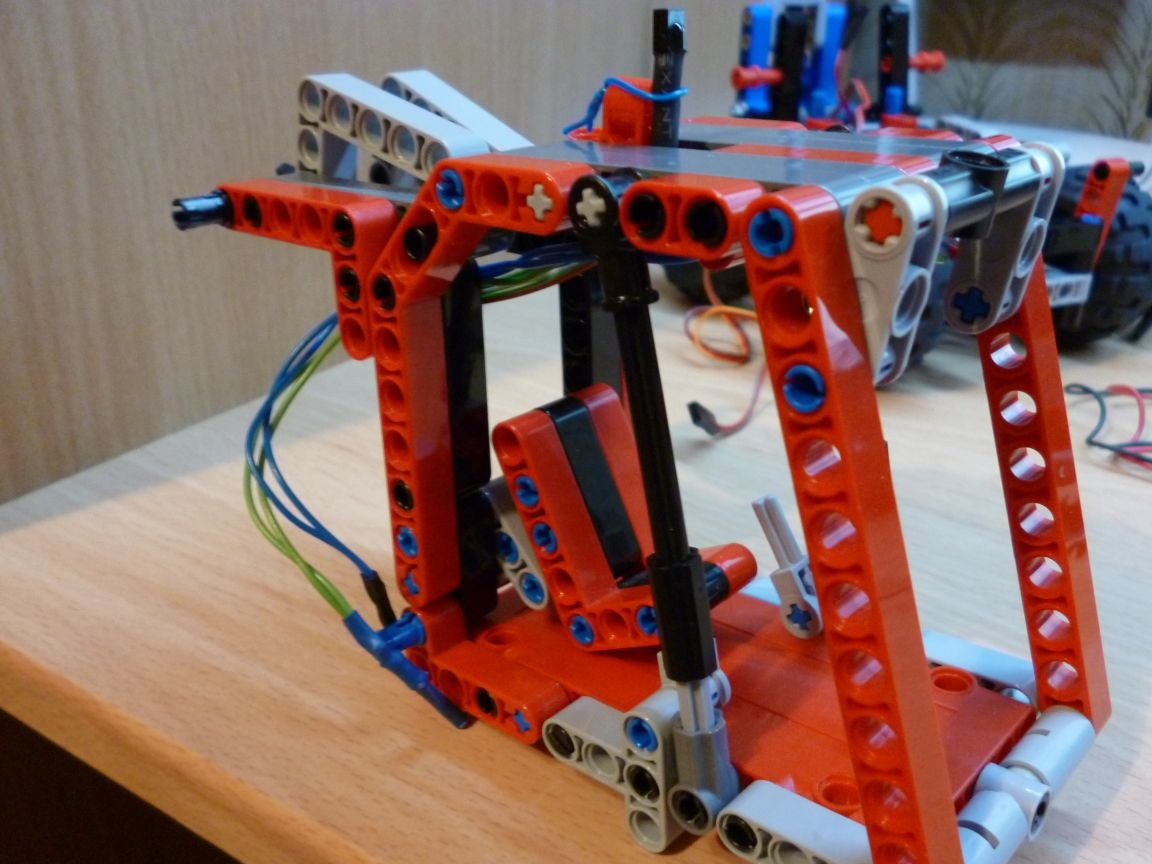
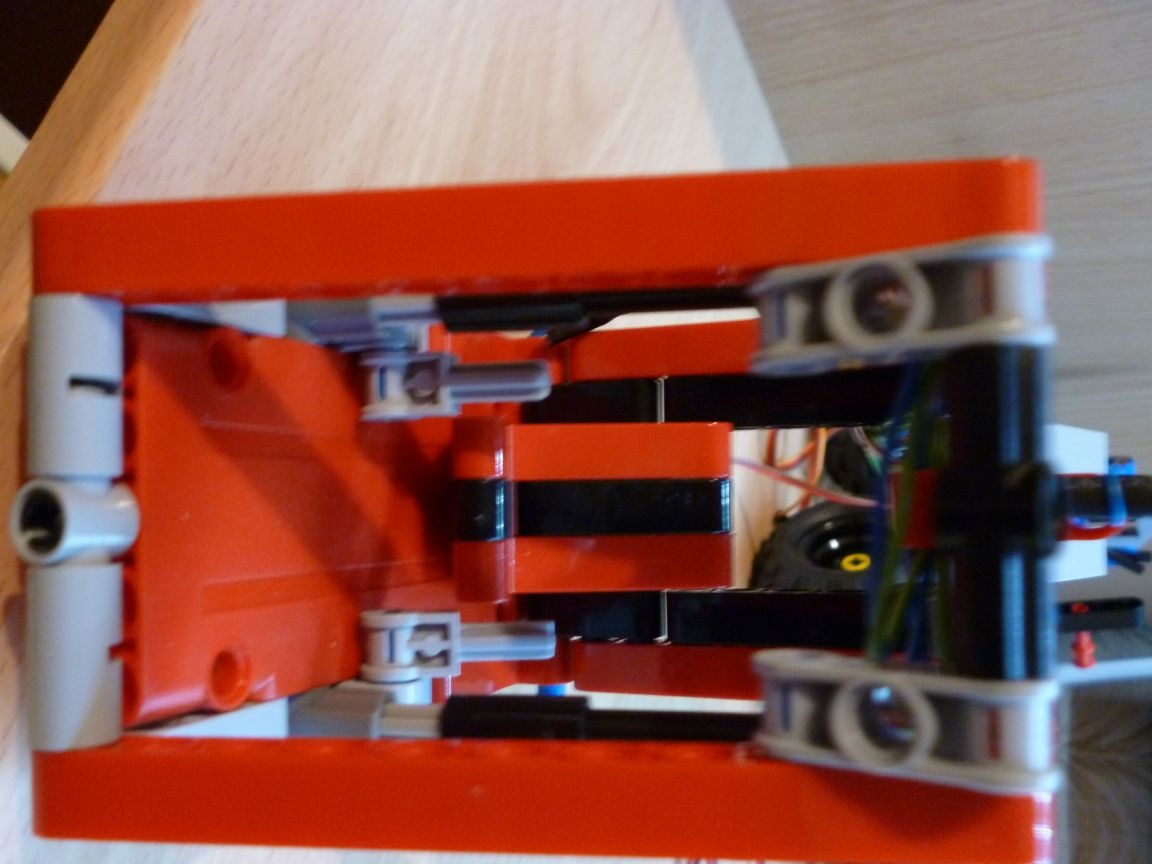
4. lépés fülke.
A lego technikából álló fülkét fotókról kell összeállítani:

Az 5. lépés egy villanyszerelő.
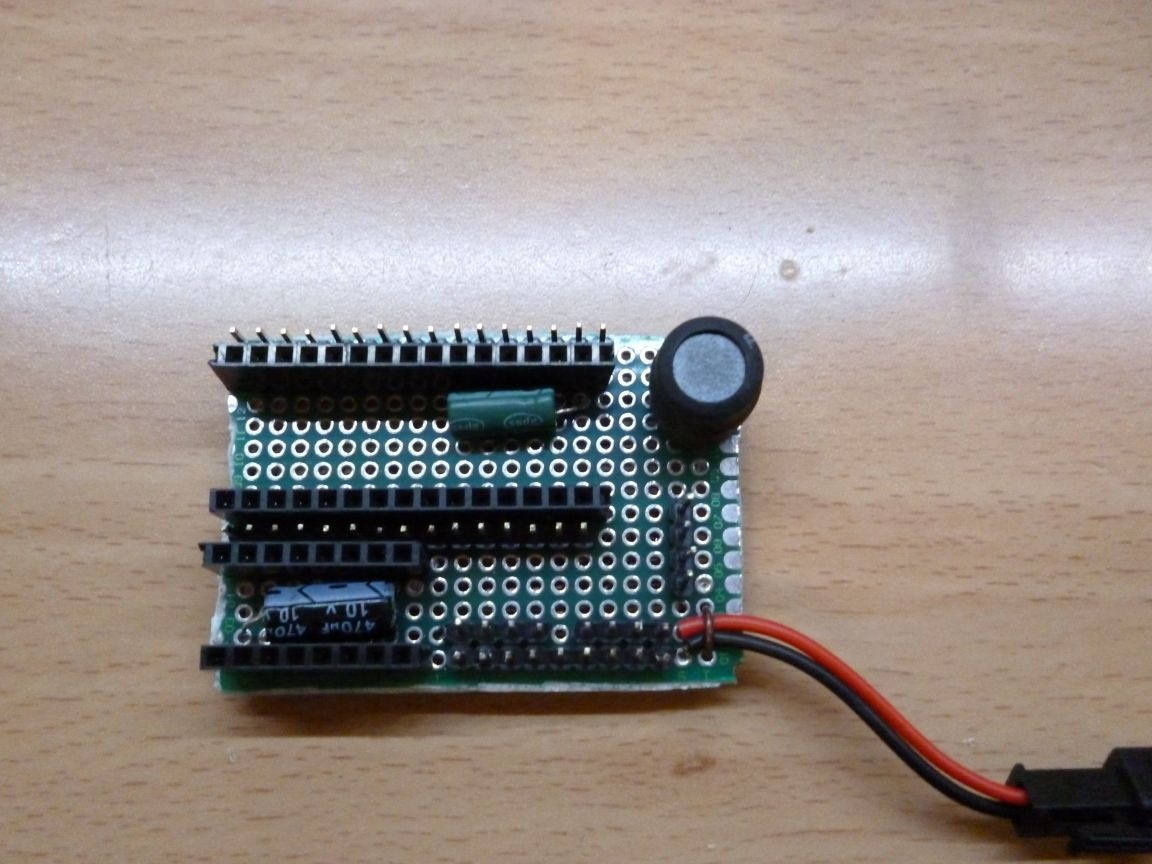
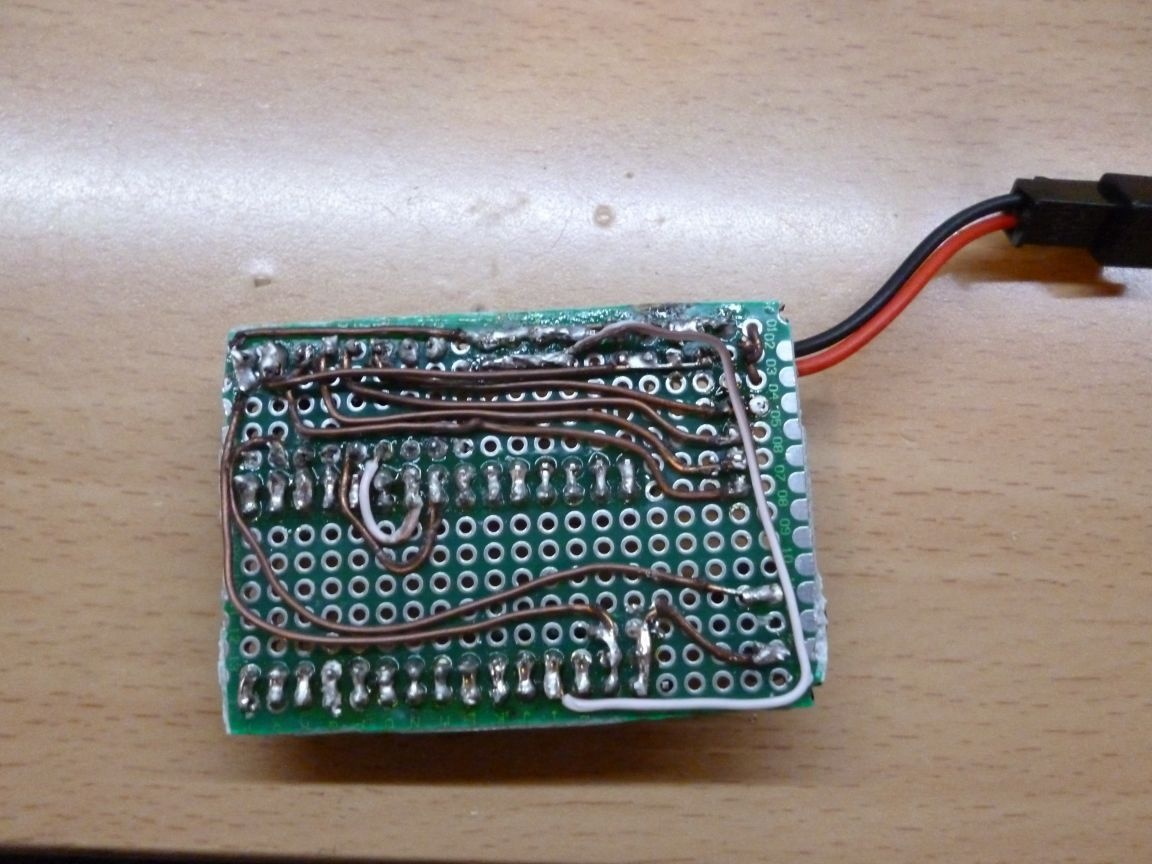
Itt kell vennie a forrasztópárat. A kényelem érdekében mindent meg kell forrasztani az áramköri kártyán, a következő ábra szerint:
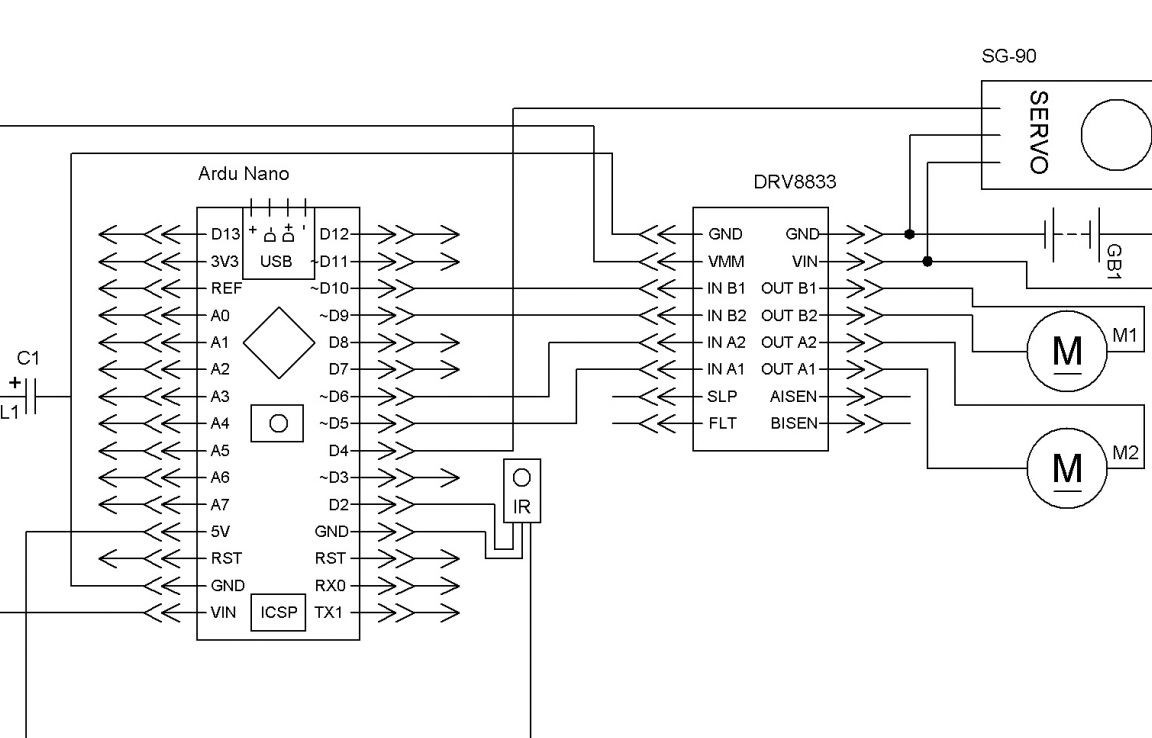
Azt hiszem, érdemes egy kicsit magyarázni: bármilyen kis teljesítményű kondenzátort magával vihet, bármilyen indukciós induktorral is rendelkezhet, ez a mikrokontroller feszültségének stabilizálásához szükséges. Az ellenállásokat ki kell választani a használt LED-ek számára. Vettem egy infravörös vevőt egy régi játékból, de megvásárolhatja egy rádióüzletben. Erõs interferencia esetén adjon hozzá egy kondenzátort az infravörös vevõ tápáramköréhez.
Megkaptam ezt:
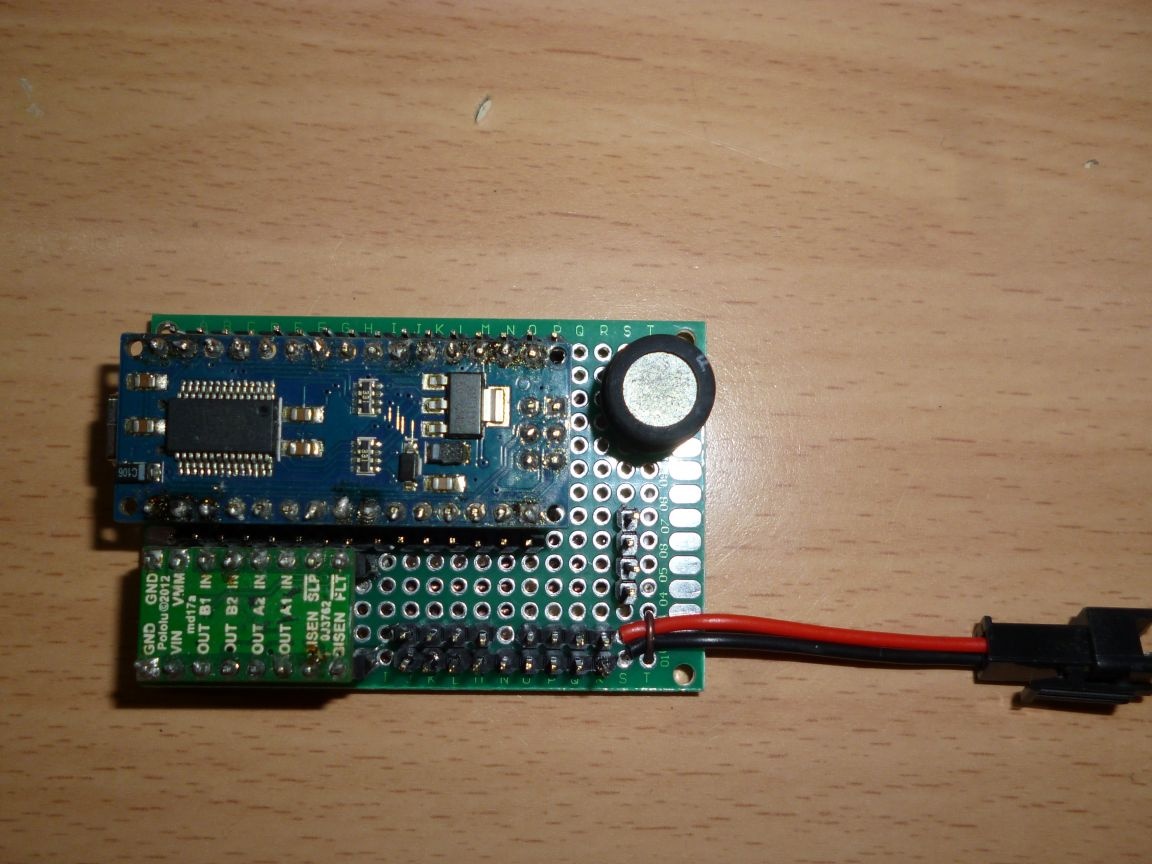
Telepítjük az Arduino Nano-t és a DRV 8833-at a helyükre:
És most feltette a deszkát az alvázra (a kényelem kedvéért vegye le a kerekeket):
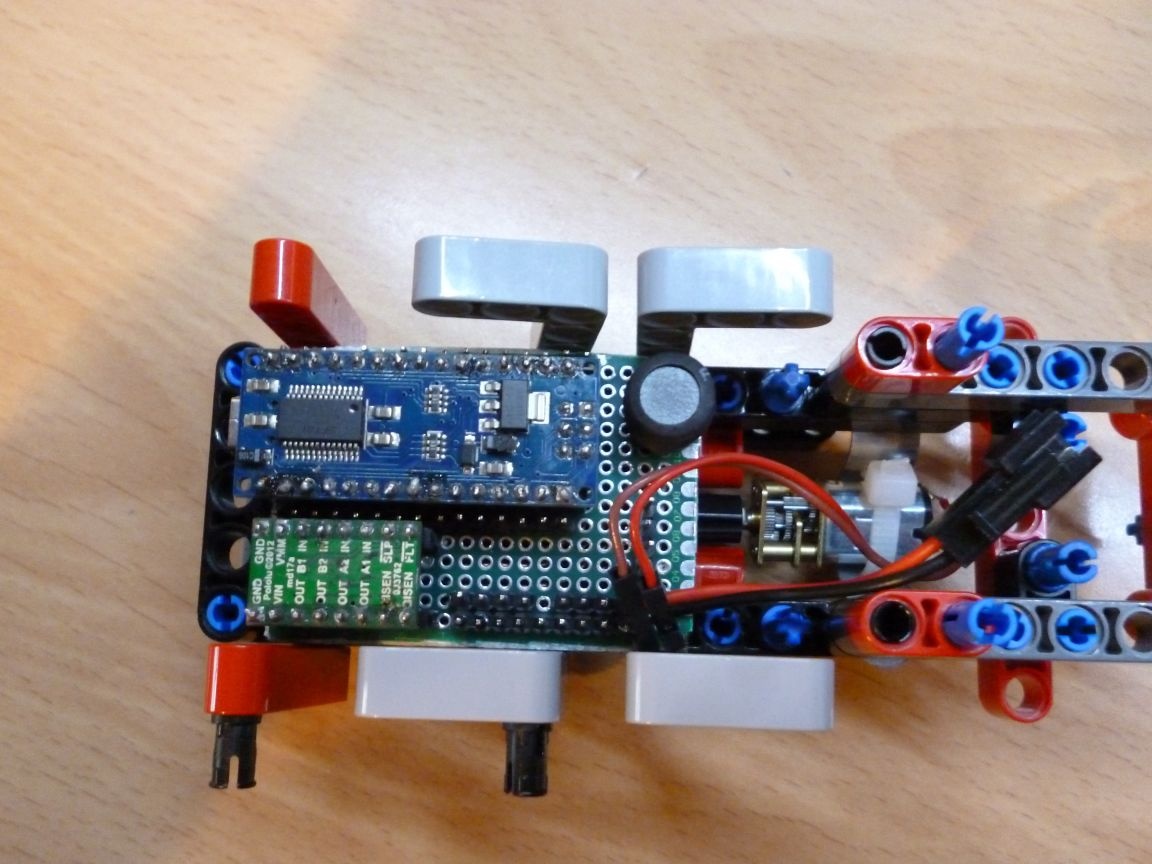
Energiaellátás céljából 4 Ni-Mn 1.2v 1000mA akkumulátort használtam sorba kötve és elektromos szalaggal feltekerve. Kétoldalas ragasztóra ragasztottam őket a fülke fedele alatt.
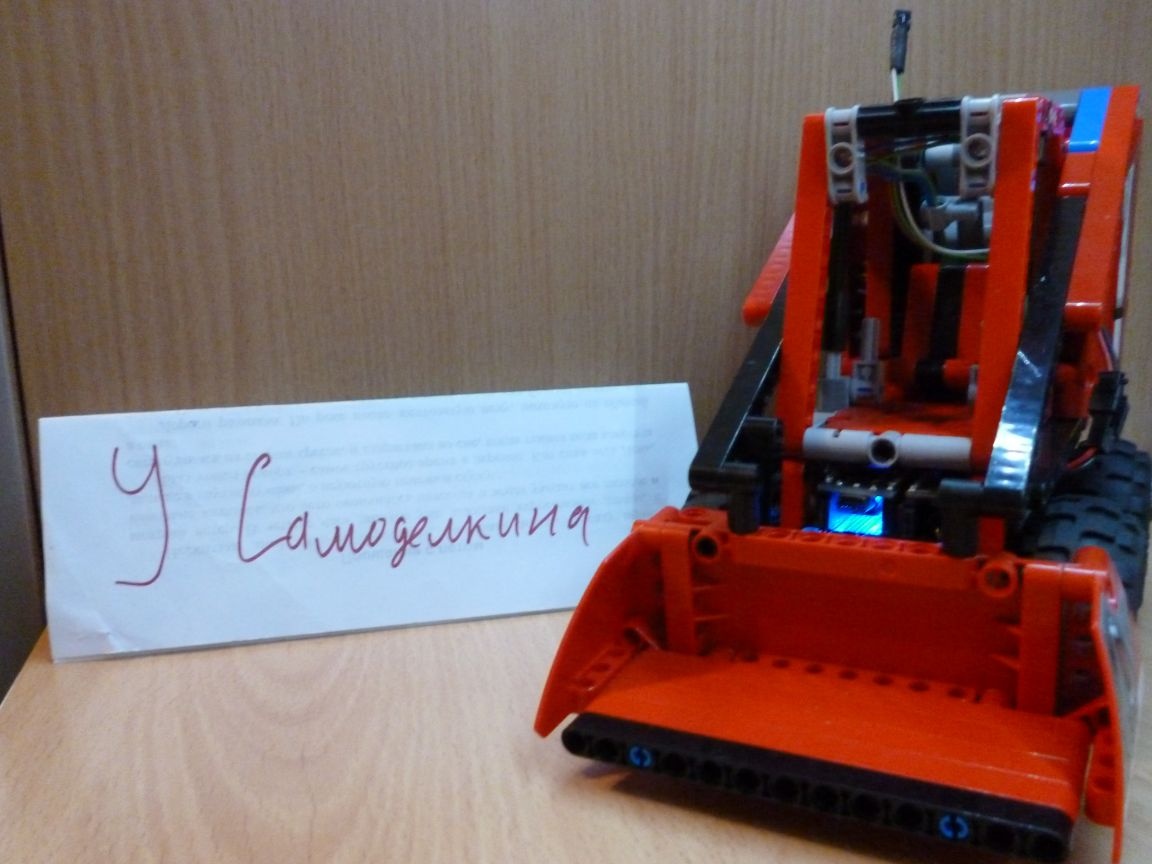
6. lépés a fülke felszerelése.
Összekapcsoljuk az infravörös vevőt, a motorokat és a diódokat az ábra szerint, helyezzük a fülkét az alváz tetejére, rögzítsük a vödröt (bármilyen vödör készíthető):

7. lépés: firmware.
Arduino IDE-ben programozom. Először ki kell töltenie a firmware-t, és a terminálon át kell néznie a távirányító kódjait, amelyeket használni fog. Bármely IR távirányítót vehet, például TV-ről vagy DVD-lejátszóról. A terminálon lévő gombra kattintva megjelenik a megnyomott gomb kódja, és írjuk le egy darab papírra. Ezt az összes gombbal megtesszük, amelyeken be szeretnénk programozni a betöltő műveleteit. Ezután szerkessze a vázlatot. Írjuk bele a szükséges műveletekhez rögzített kódokat, és újra villogjuk.
beszúrás
Betöltő videó: