


A tervezésem részét a Lego Technic 42029 szerelési útmutatójából vettük át. A fennmaradó rész az én improvizációm. Szüksége van tehát:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (jobb, mint a Populus, de van egy kínai megfelelője is)
- 2 szervohajtás az SG-90-et
- IR vevő
- Motor sebességváltó 200 ford / perc
- 2 LED
- 2 ellenállás 150 ohm
- Kondenzátor 10v 1000uF
- 2 egysoros fésű PLS-40
- 2 PBS-20 csatlakozó
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA elem
- Csatlakozó apa-anya két érintkezővel a vezetékhez
- Homutik
- Különböző színű vezetékek
- forrasztható
- Rosin
- levélpapír kés
- forrasztópáka
- 3x40 csavarok, anyák és alátétek számukra
- Csavarok 3x60
- Elemek Ni-Mn 1.2v 1000mA 6db.
1. lépés összegyűjtjük a felfüggesztés hátulját.
Először össze kell szerelnie a felfüggesztés hátulját a Lego 42029 1. rész utasításainak megfelelően, kezdve 3 oldal és 8 között. Ezután adjon hozzá néhány részletet a motor és a sebességváltó felszereléséhez.
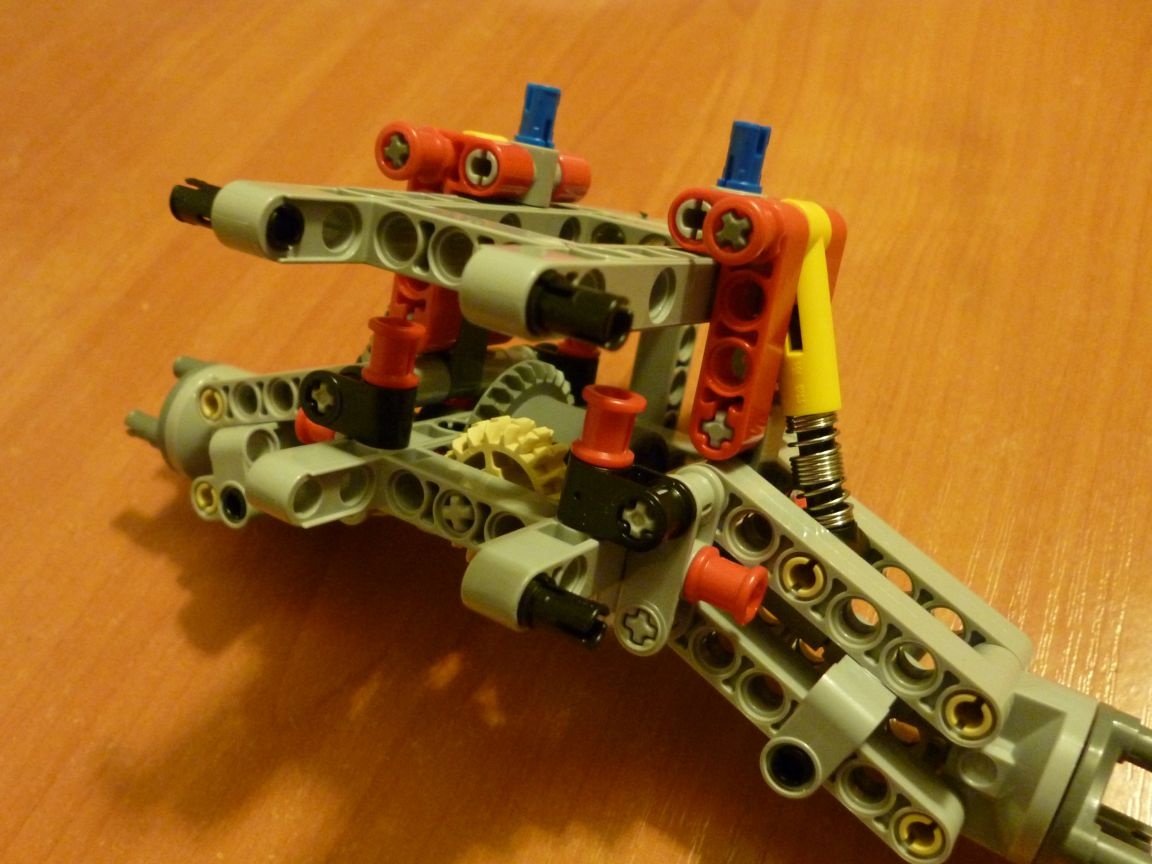
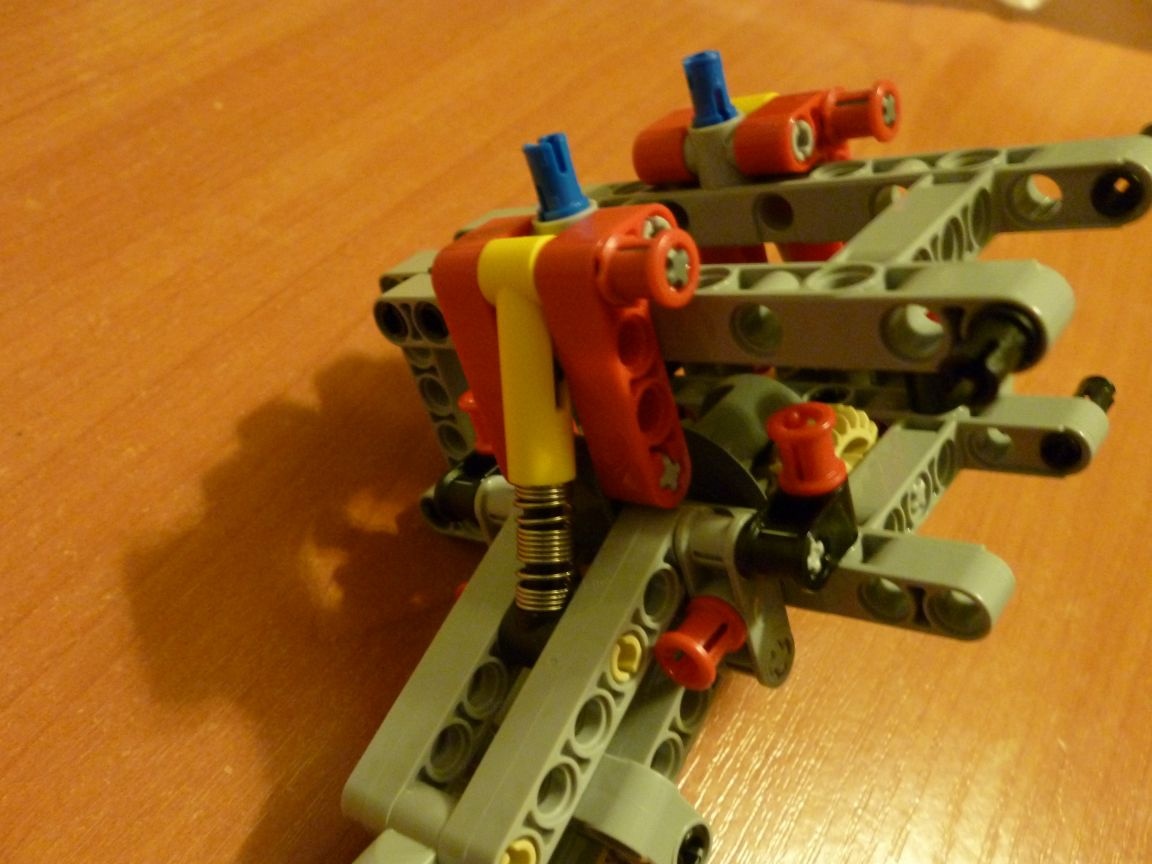

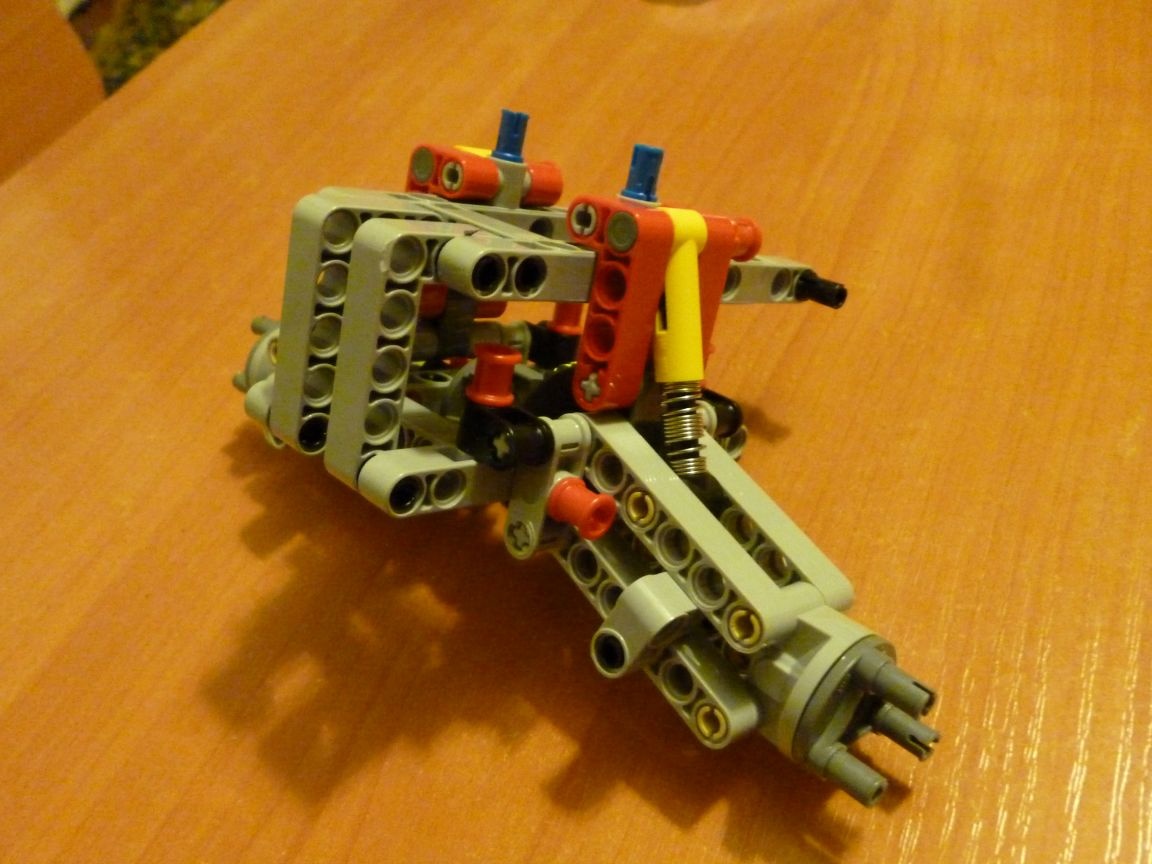
2. lépés első felfüggesztés.
A felfüggesztés elülső részét a Lego 42029 1. rész utasításainak megfelelően, a 21. és 23. oldalról összeállítottuk. A trapezoidot a Lego utasítások második részéből a 6–11. Oldalról vesszük össze. A csörlőt a 14–22. Oldal második feléből állítjuk össze.
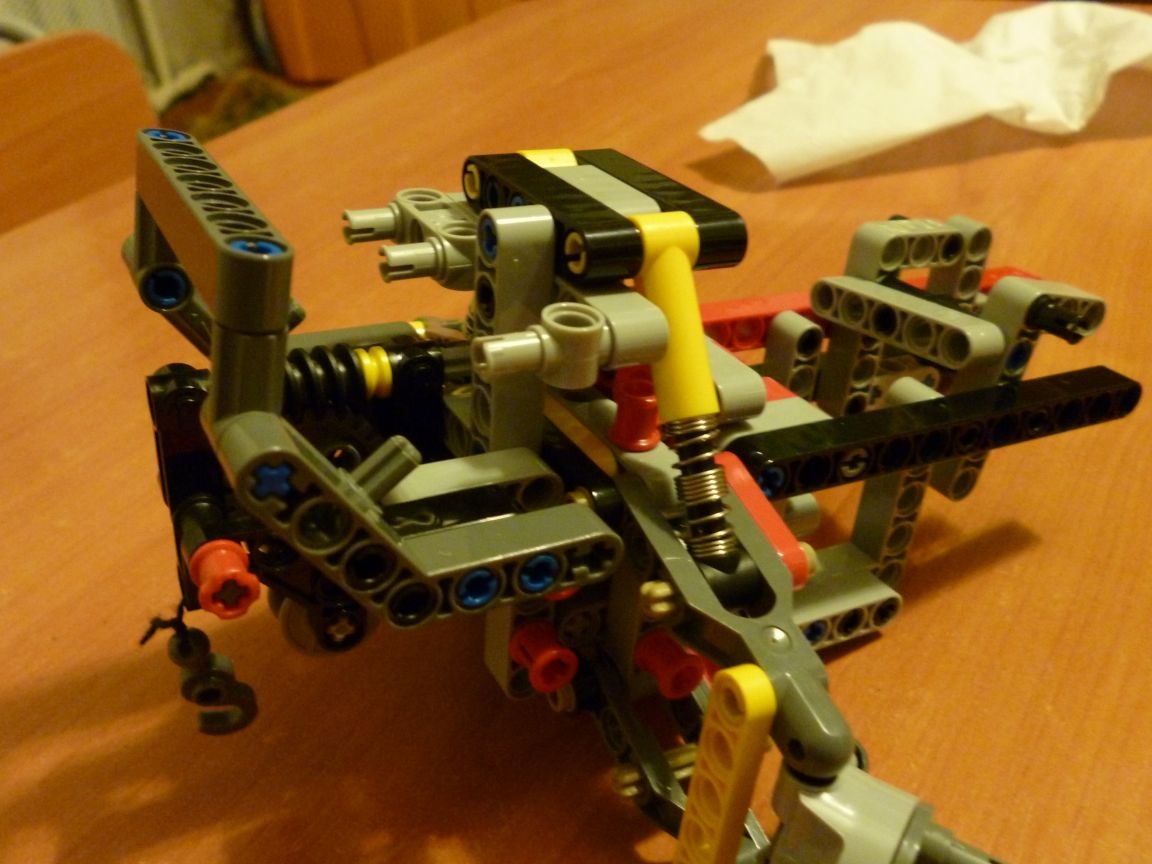
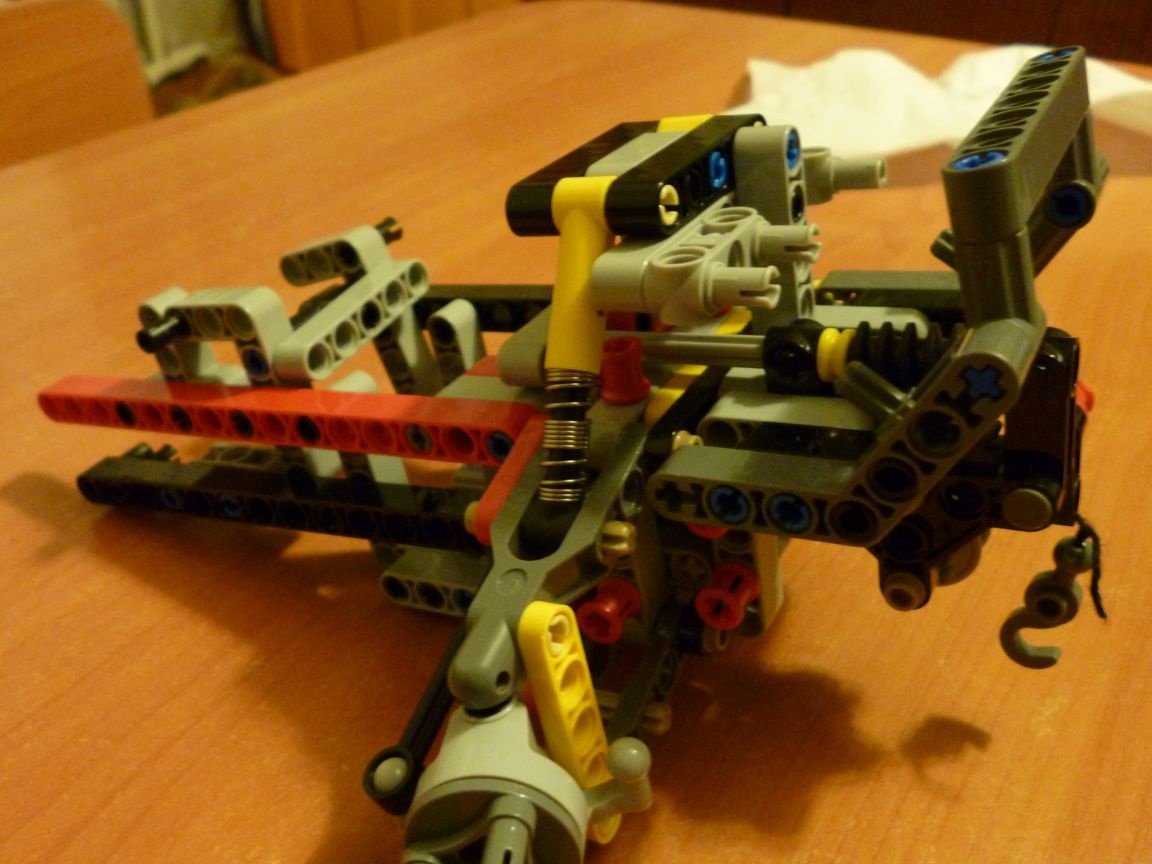
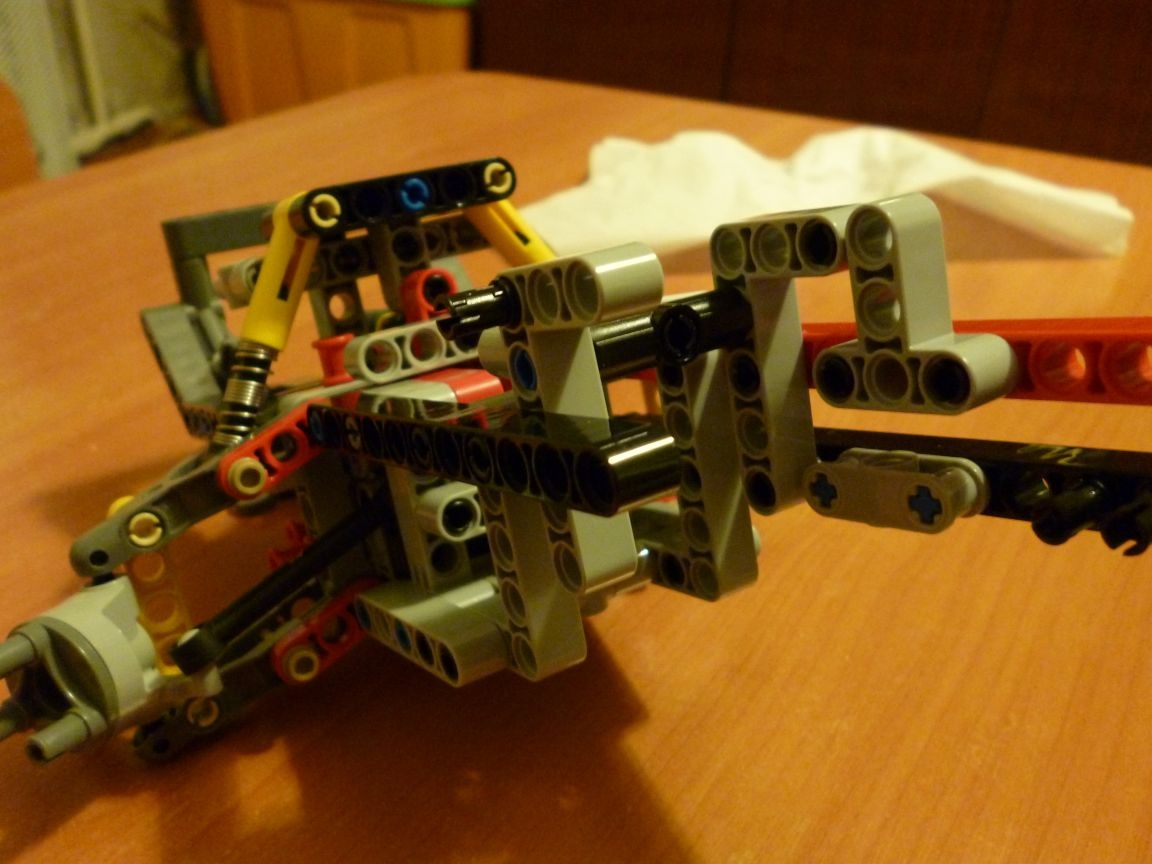

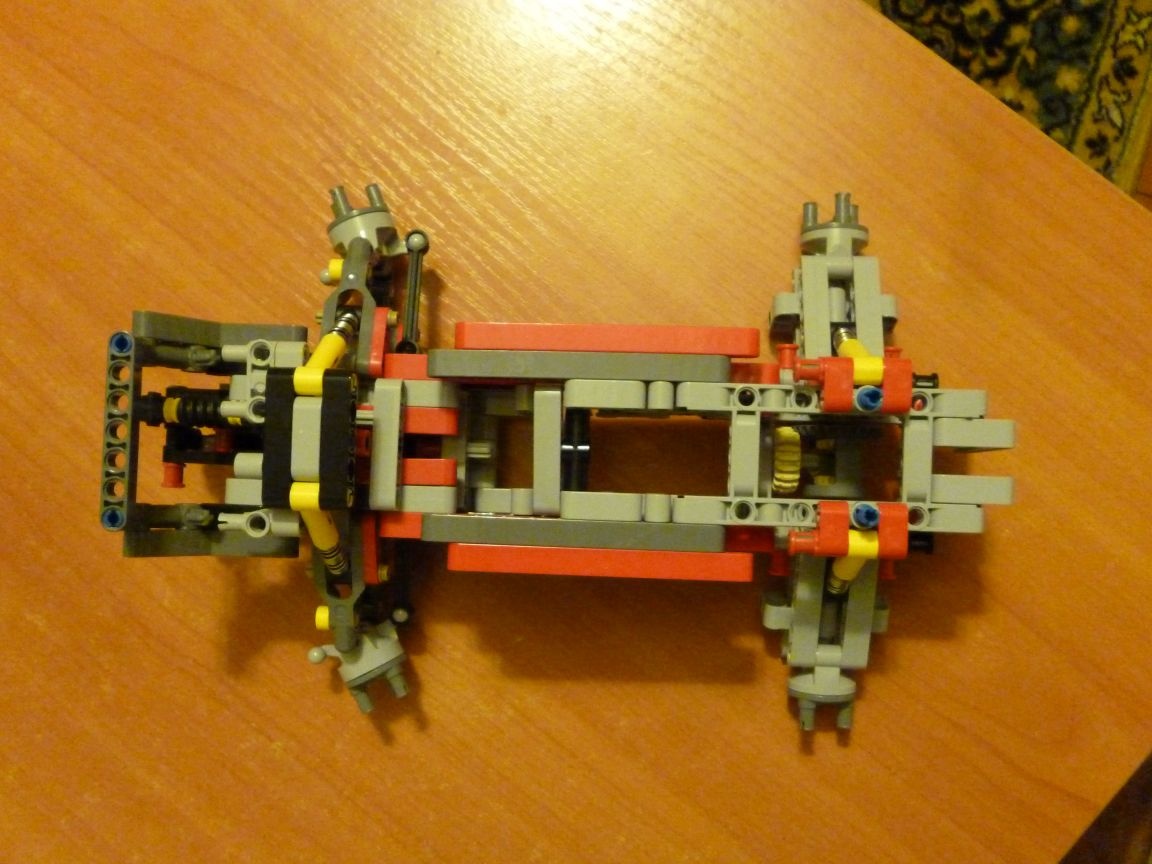
3. lépés: szerelje össze az alvázot.
Mindkét részt összekapcsoljuk a képen látható módon:

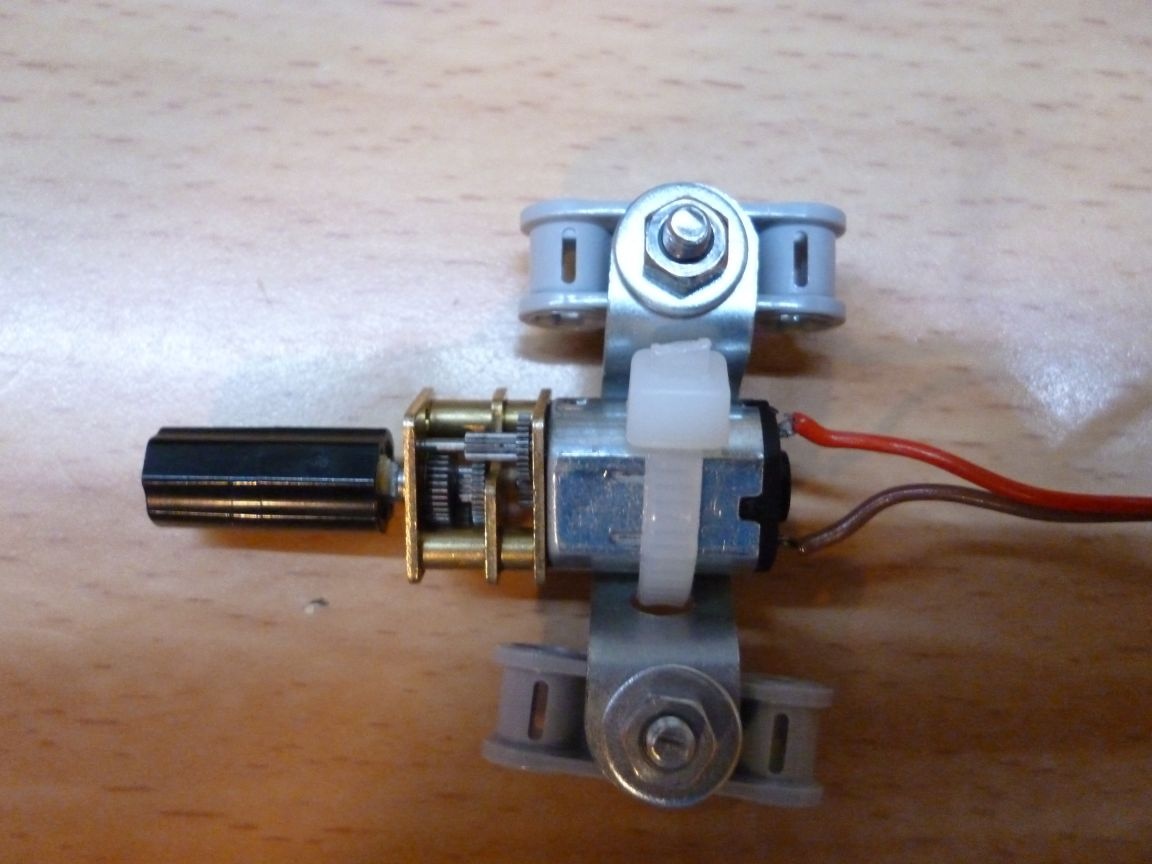
A hajtómotor és a tervező részei közötti összekapcsolás problémáját az alábbiak szerint oldottam meg: tegyünk a hajtómotor tengelyére összekötő hüvelyt és illesszen be egy darabját egy rögzítéshez. A hajtómotor felszereléséhez használt vastervező fém műanyagból és bilincsből áll.
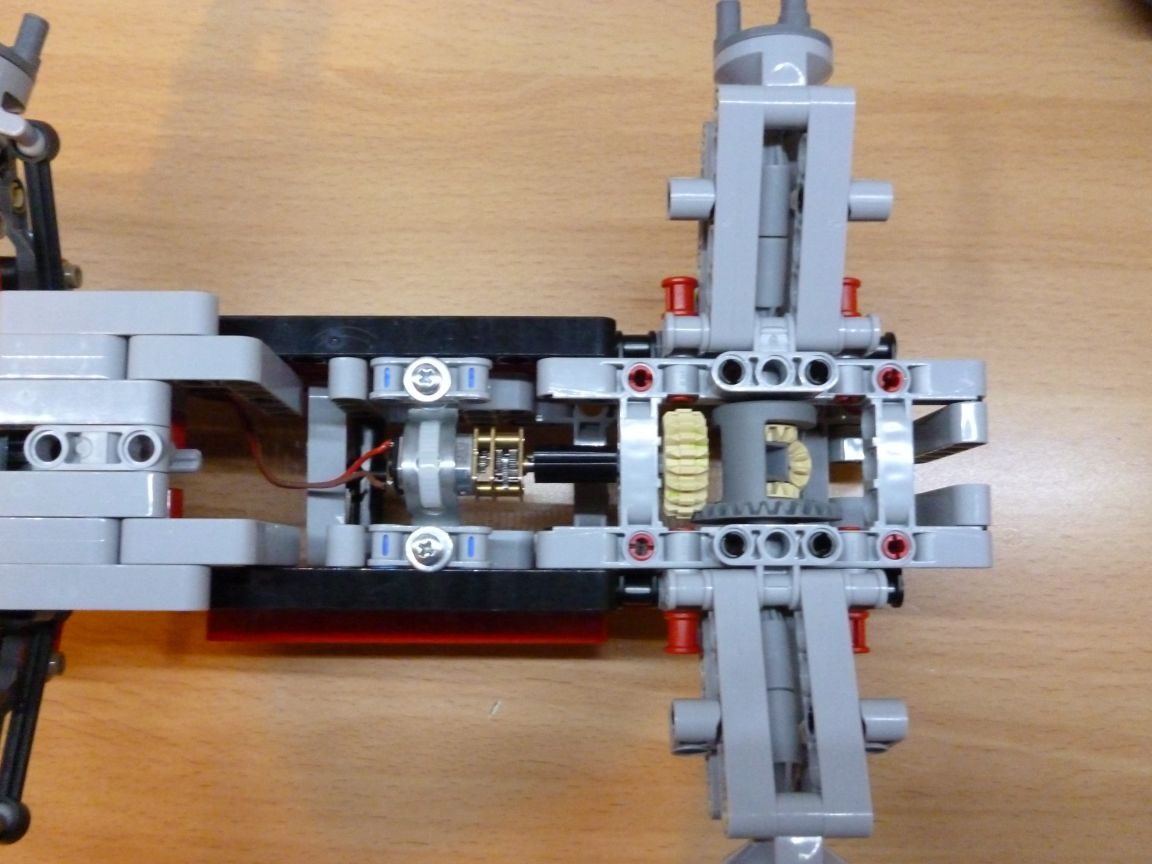
Kiderült, hogy a következő:
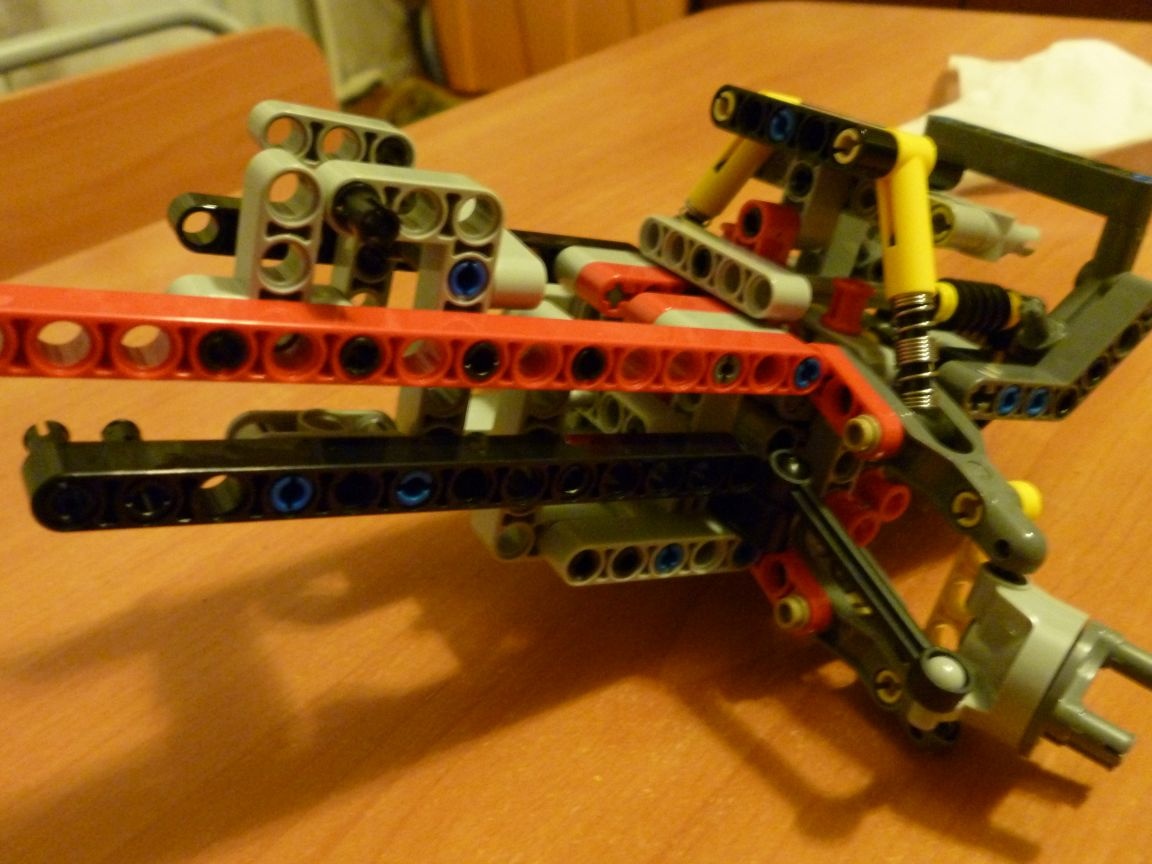
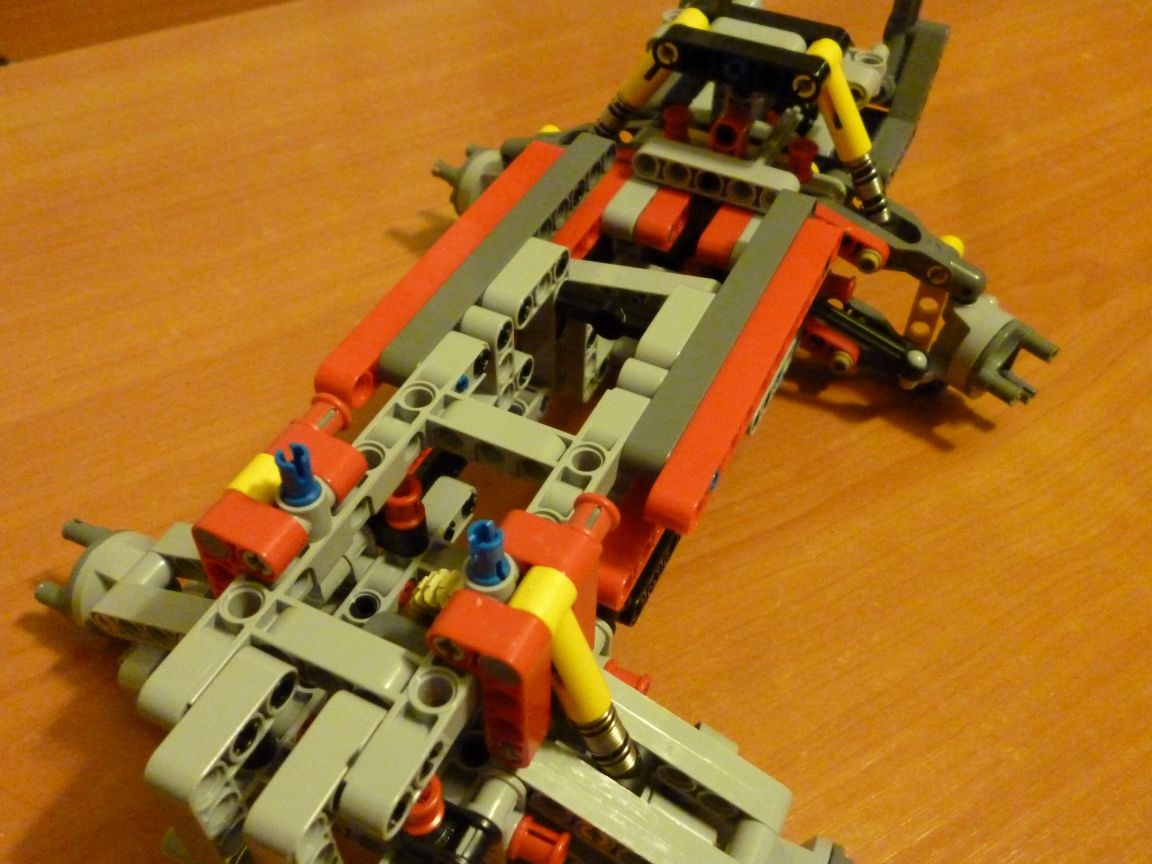
Szerelje fel az alvázra:
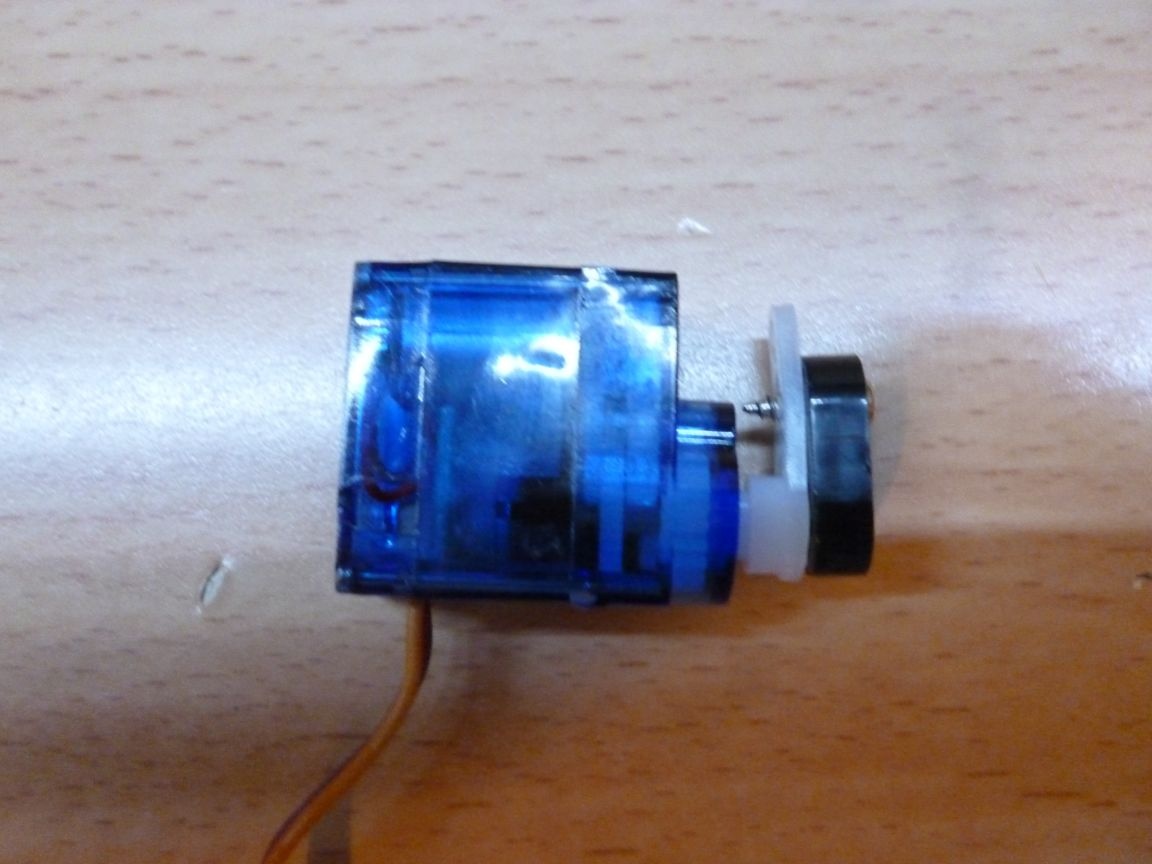
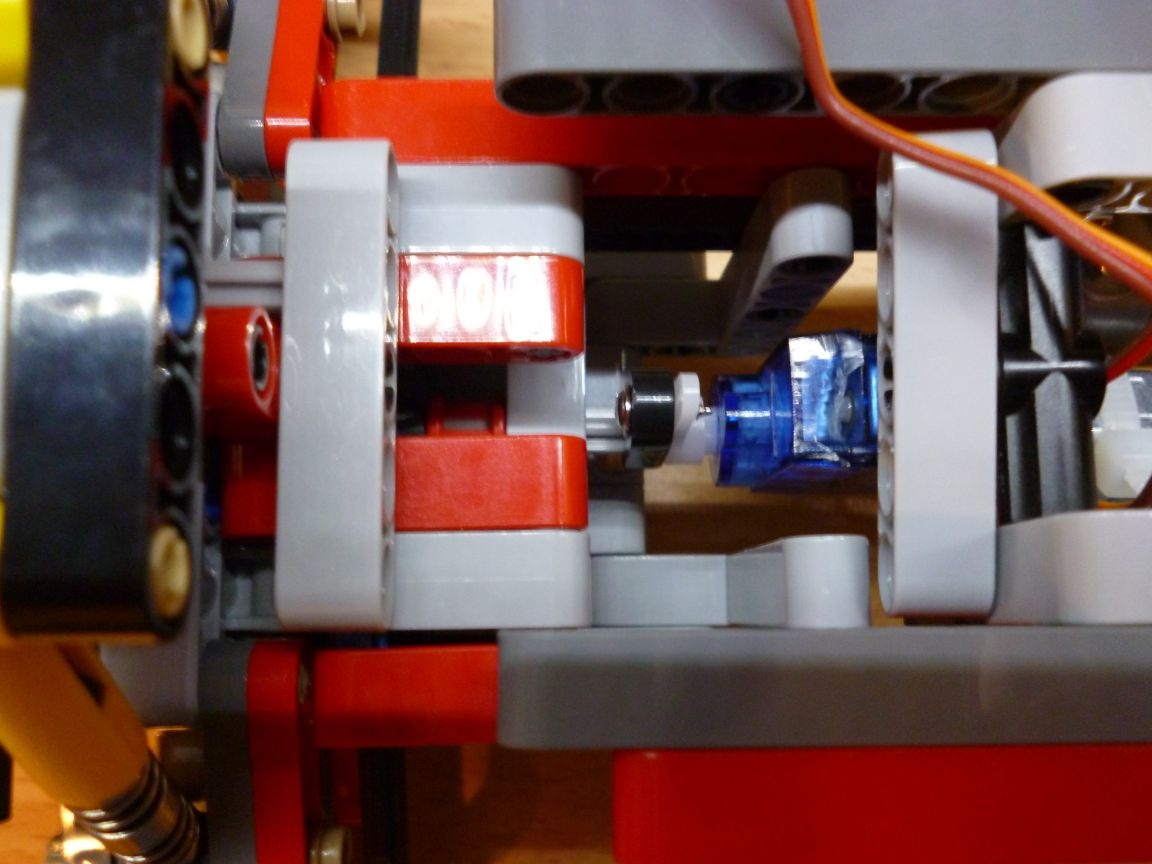
A forgatás elvégzéséhez az SG-90 szervót vettük igénybe. Óvatosan fúrni kell, hogy ne érintse meg a belső részeket, egy 3,2 mm átmérőjű átmenő lyukat vagy csak levágni egy levélpapír kés segítségével. És vágja le a kiálló részeket („szárnyak” a rögzítéshez). Helyezzünk egy csavart a készített lyukba, és rögzítsük anyákkal. A szervótengelyre felteszünk egy kart egy lego csavarozott elemmel:
Set:
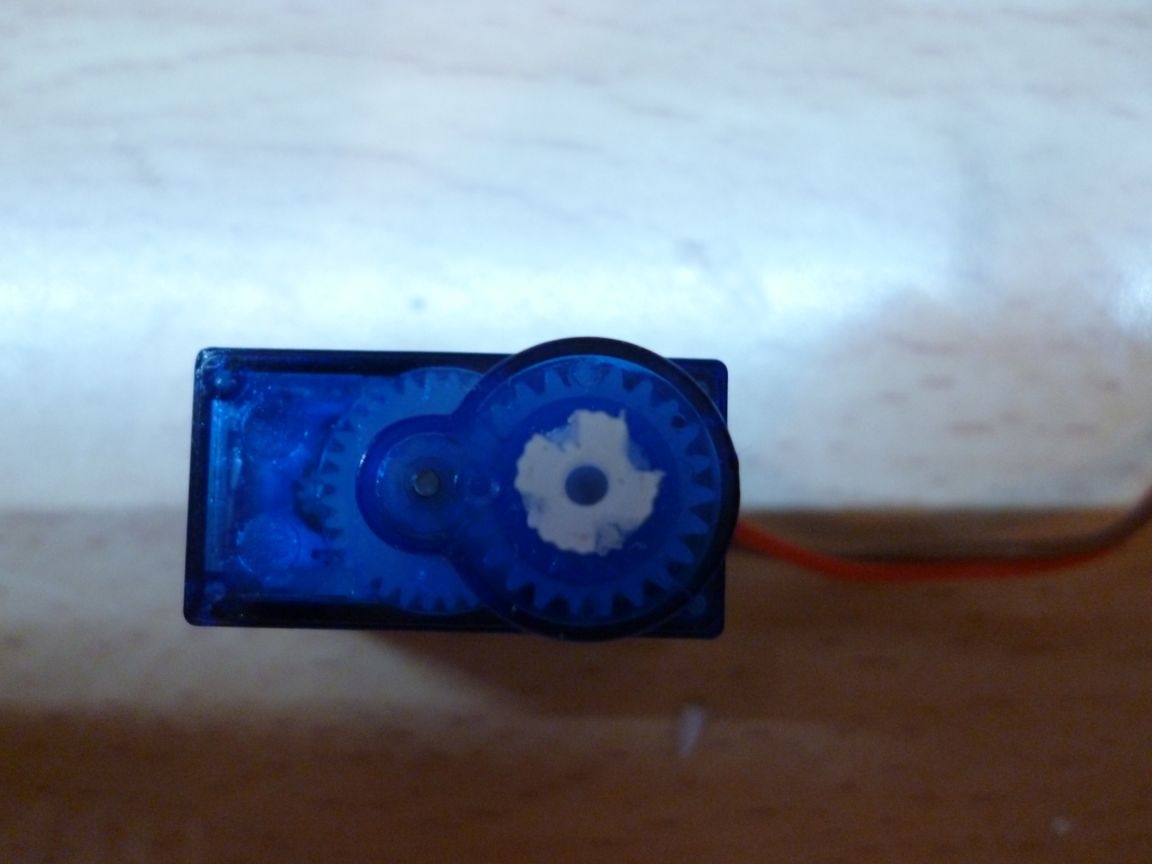
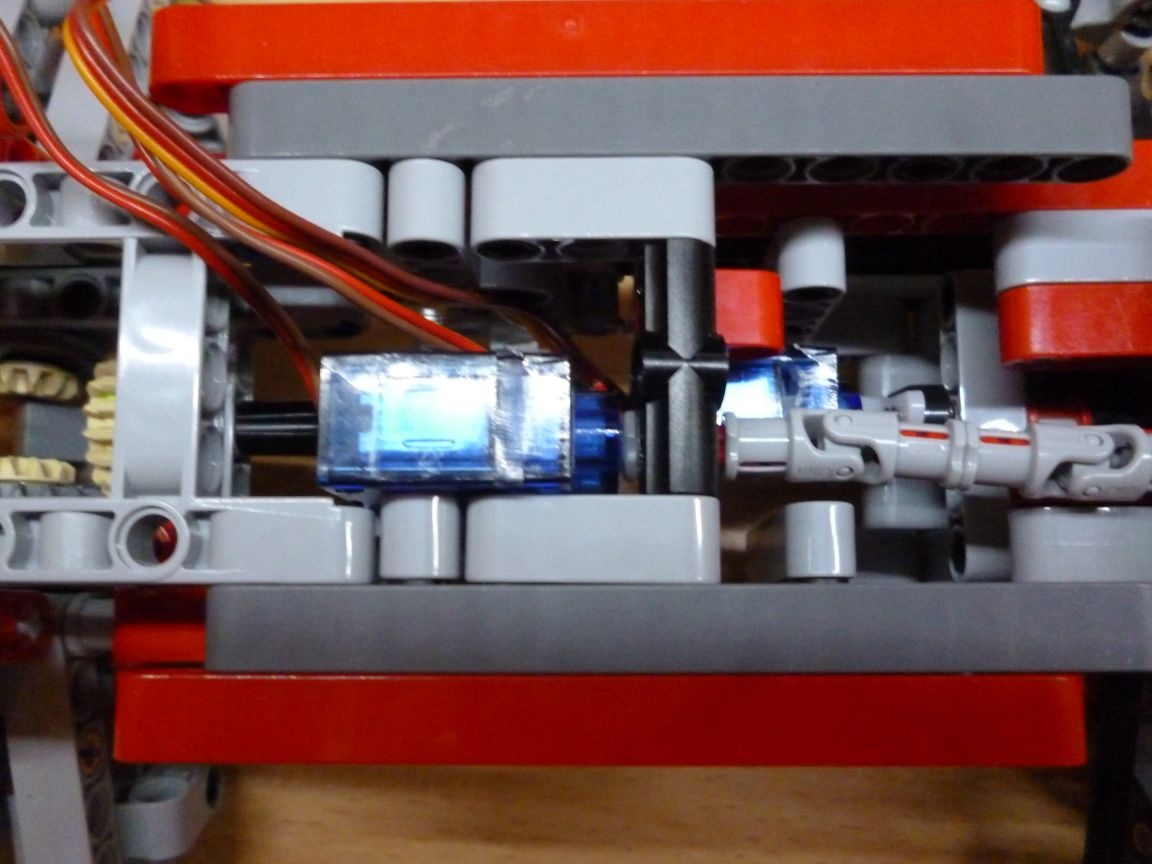
A második szervót fogjuk használni a csörlőhöz. Ugyanazt csináljuk, mint az elsővel. És most azt modernizálni kell, hogy szabadon forogjon. Ehhez szétszereljük a szervómeghajtót, távolítsuk el az alaplapot és a vezetékeket közvetlenül a motorhoz forrasztjuk. Kihúzzuk a főberendezést, és levágjuk az utazási megállókat.És végül, ahogy a képen is készítünk egy nyílást papírterheléssel a főberendezéshez:
Csatlakozunk a csörlőhöz és feltesszük az alvázra:

4. lépés: A vezérlő kezelése
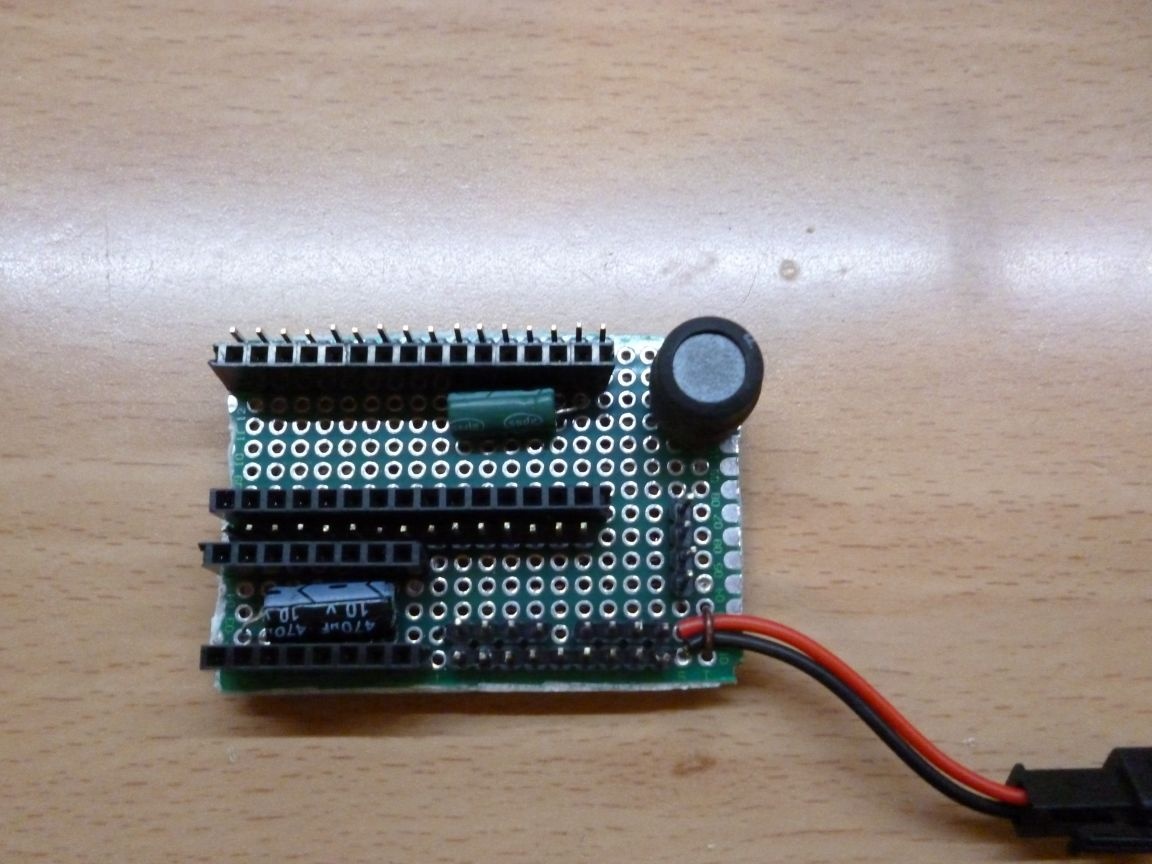
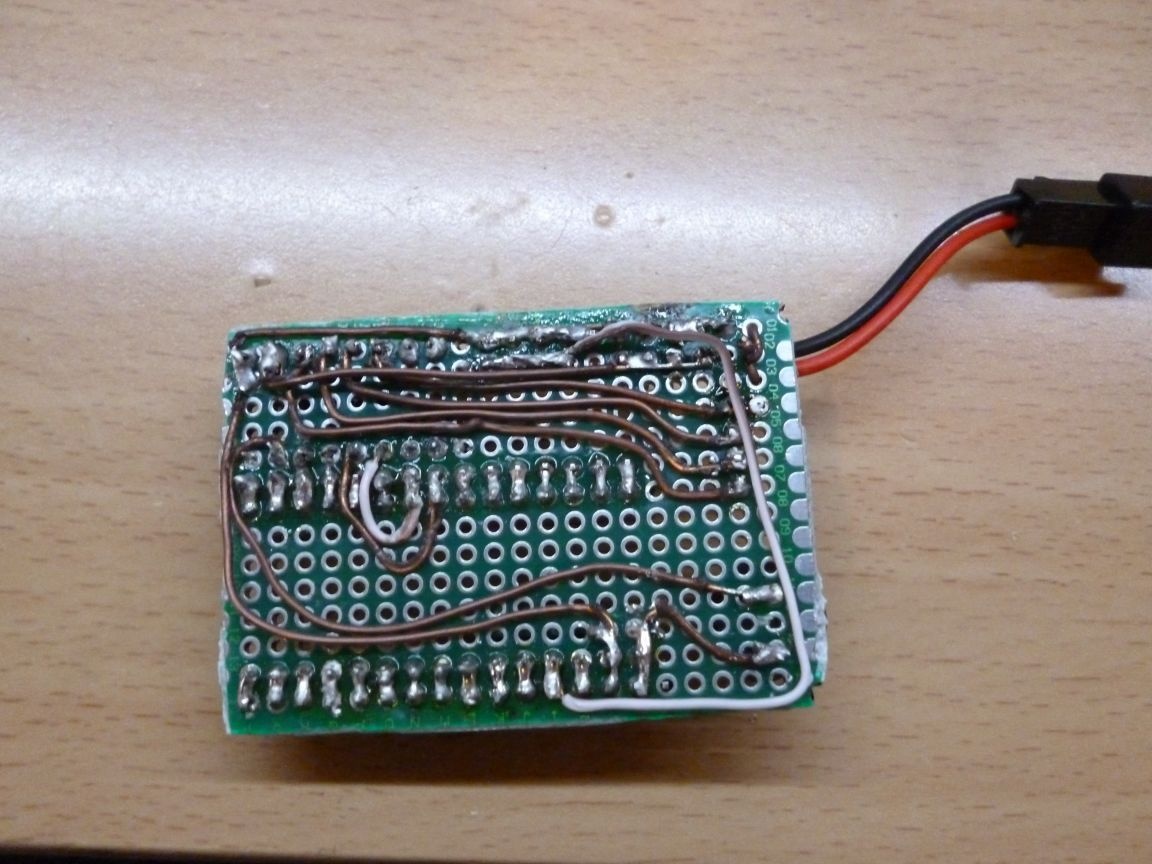
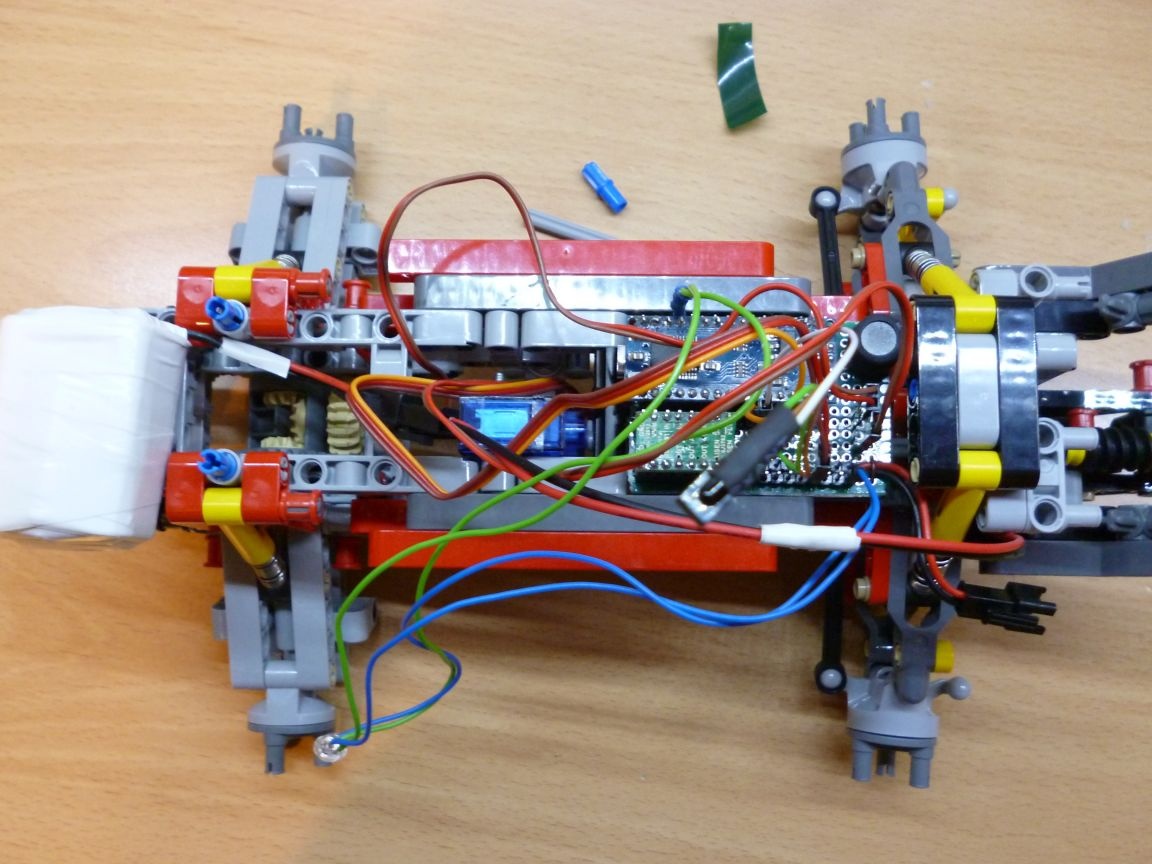
A vezérléshez Arduino és IR vevőket fogunk használni. Vegyünk egy forrasztópárat, és a következőket összeszereljük az áramköri lapra:
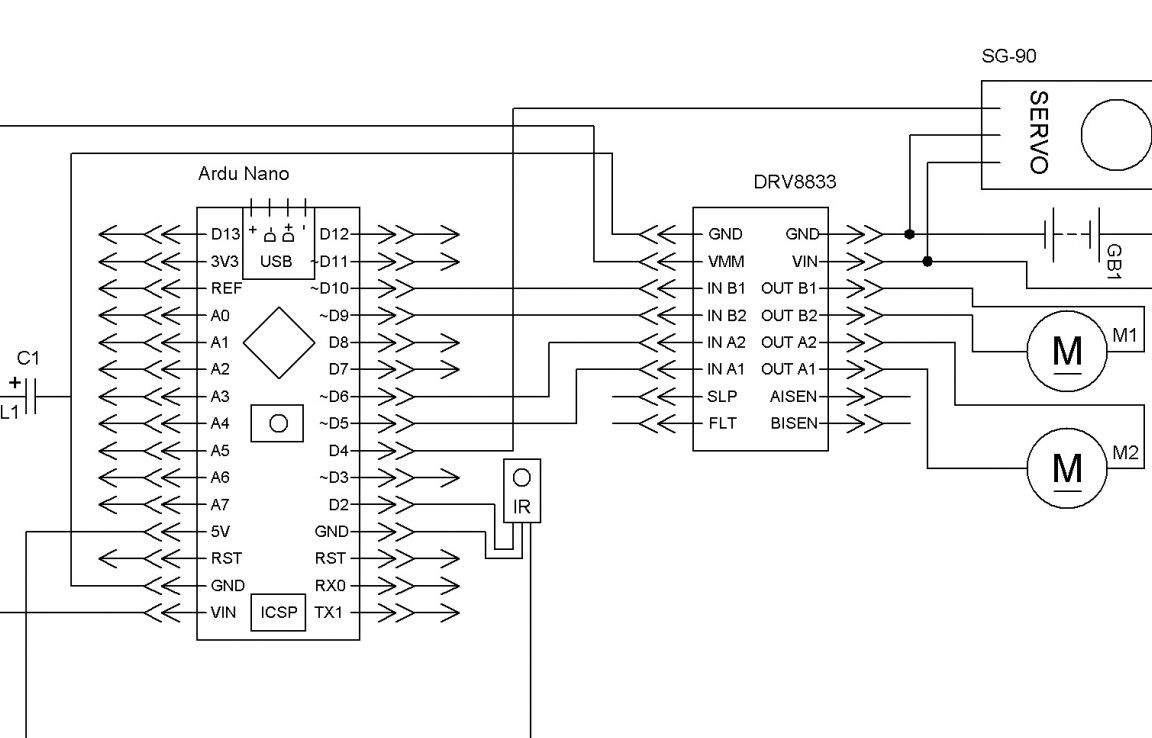
Magyarázzam: bármilyen kis teljesítményű kondenzátor, az induktivitás tekercs is megtalálható, stabilizálnia kell a mikrovezérlő feszültségét. Az ellenállásokat az alkalmazott LED-ek kiválasztják. Az infravörös vevőt vagy a TSOP-t egy régi játékszerből lehet elvenni, vagy rádióüzletben vásárolni. Erõs interferencia esetén adjon hozzá egy kondenzátort az infravörös vevõ tápáramköréhez.
Ennek eredményeként kapjuk:
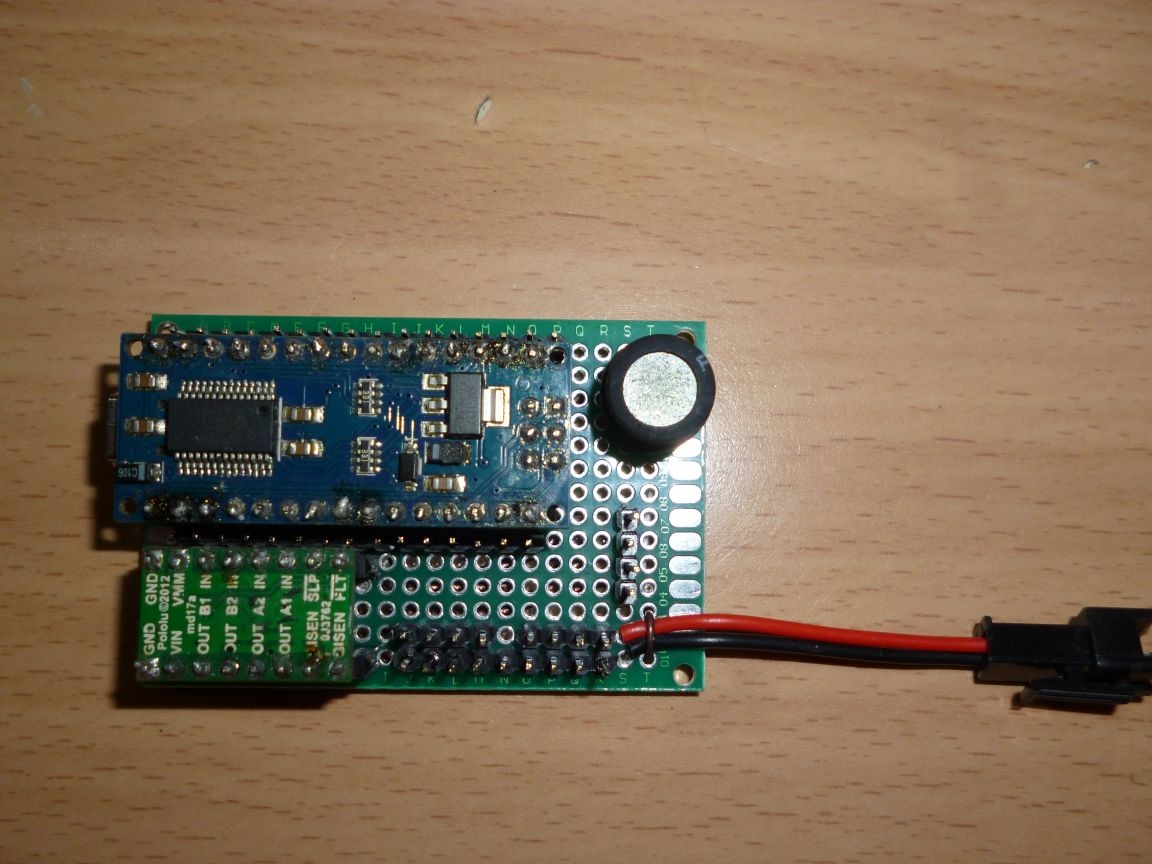
Telepítjük az Arduino Nano-t és a DRV 8833-at a helyükre:
És tedd a deszkát az alvázra:
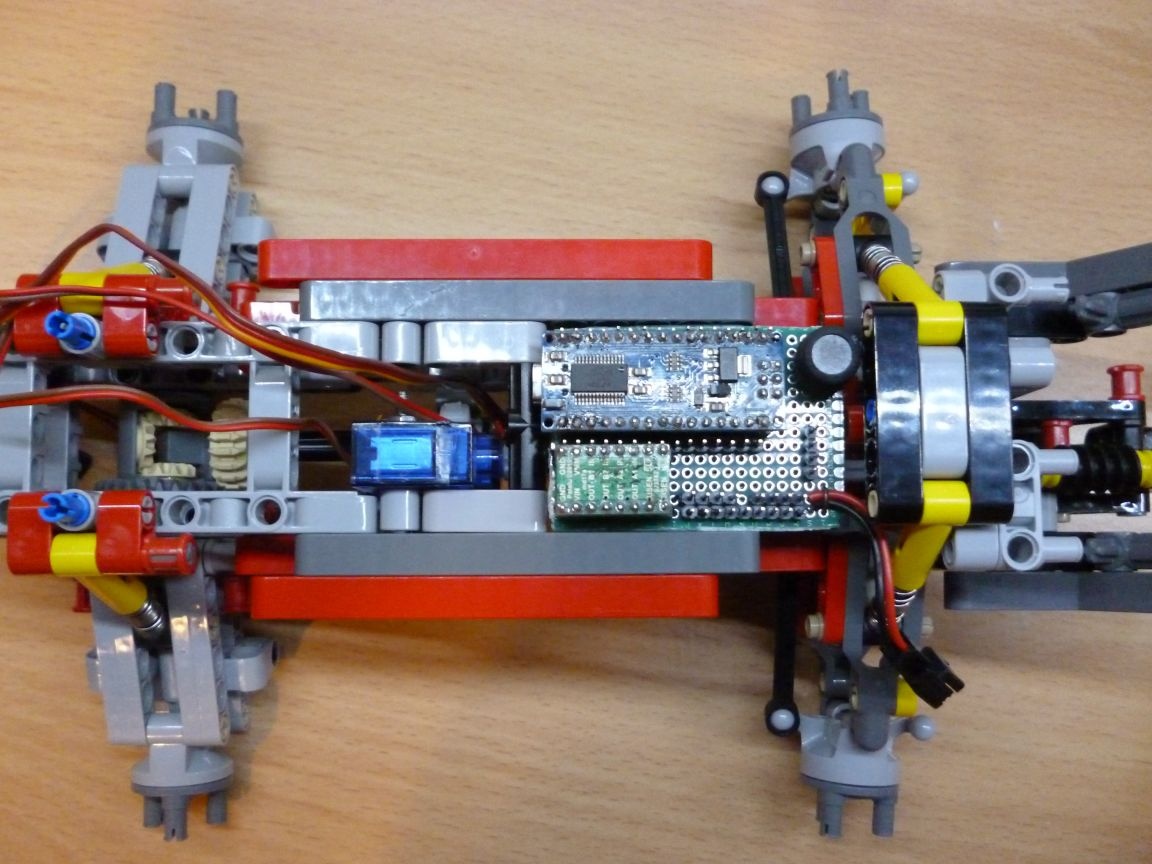
Tápegység - 6 Ni-Mn 1.2v 1000mA elem. Szükség van sorba forrasztani és elektromos szalaggal feltekerni őket. Ragasztjon kétoldalas szalagra az alváz hátuljában.
Összekapcsoljuk a teljes szerkezetet:
5. lépés Kabin
A kabin személyesen az én improvizációm, nincsenek kész utasítások, ezért össze kell gyűjtenie a fényképeket.



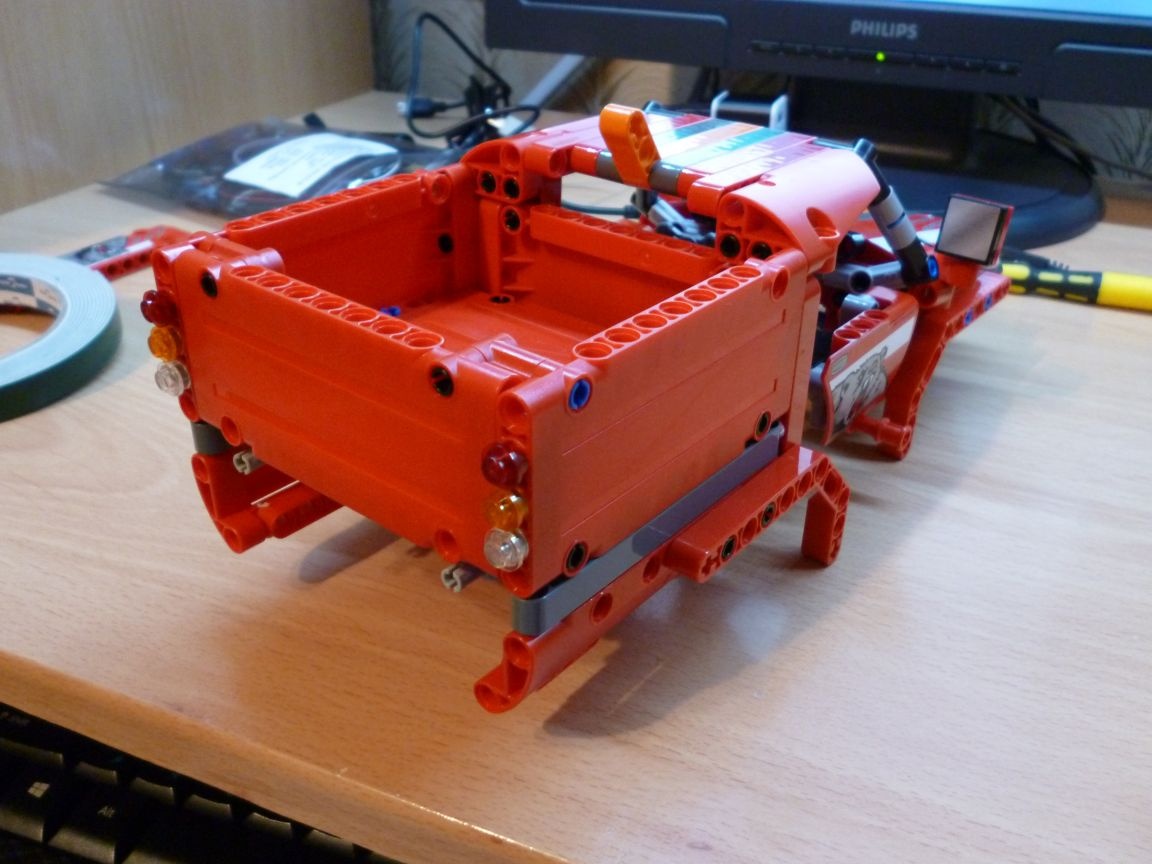
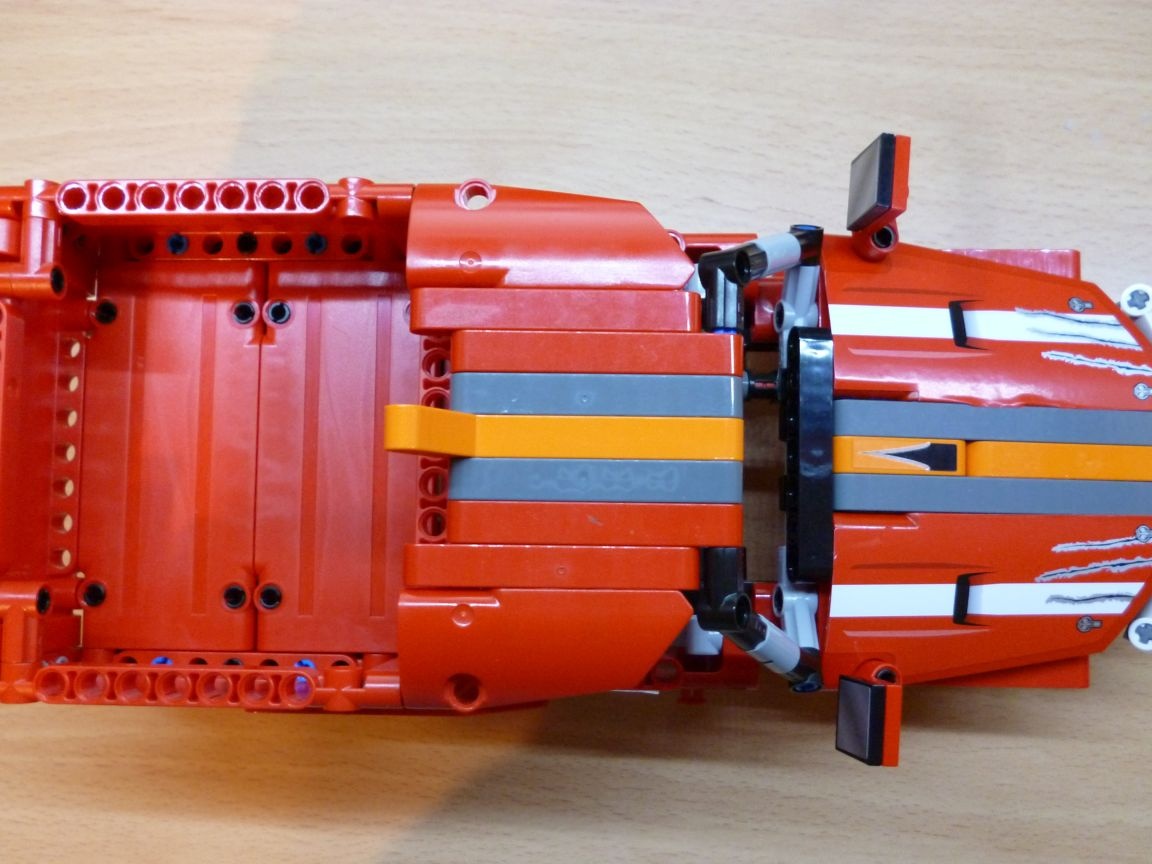
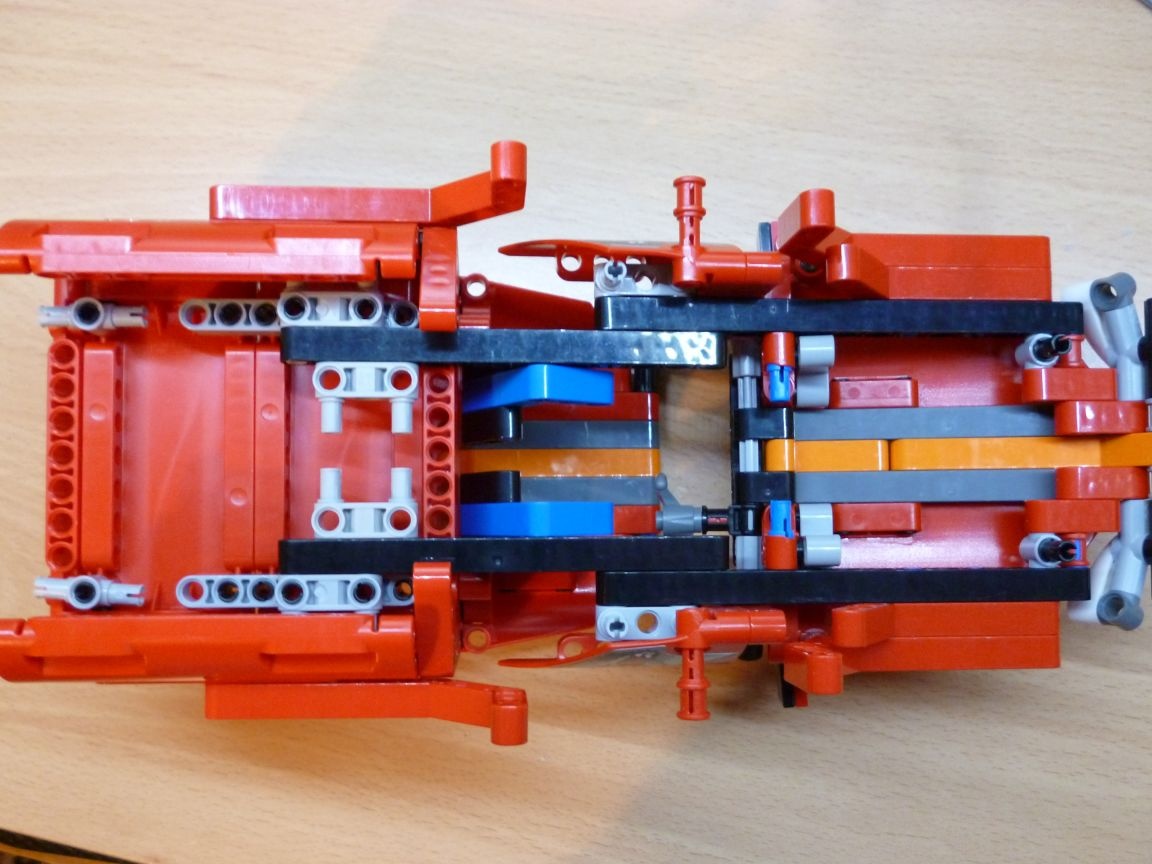
Összeállíthatja saját verzióját, csak be kell illesztenie az alváz alá. A lényeg itt az, hogy illeszkedjen a szereléshez az alvázhoz. Négyük van, és a fülke aljától jól láthatóan látszik a képen.
6. lépés firmware.
Ma azonban, mint mindig, az Arduino IDE-ben programozom. Először ki kell töltenie a firmware-t, és a terminálon át kell néznie a távirányító kódjait, amelyeket használni fog. Bármely infravörös távirányítót vehet, például TV-vel, DVD-lejátszóval, vagy összeszerelheti sajátját (van házi készítésű távirányítóm a Sega joystickról). Egy gomb megnyomásával a terminálban meglátjuk a megnyomott gomb kódját, és ráírjuk egy darab papírra. Ezt az összes gombbal megtesszük, amelyen programozni akarjuk a műveleteket. Ezután szerkessze a vázlatot. Írjuk bele a kódjainkat a szükséges műveletekhez, és újra villogjuk. Ez a firmware a Sega joystick távirányítóján van konfigurálva. A gépen való játék közben néhány árnyalattal vagy kellemetlenséggel vettem észre. Az IR parancsok megbízható vételét mozgás közben nehéz elérni. És ez is így történik: nyomja meg a nyíl előre, a gép parancsot kapott, hogy menjen, és előrerohant, elengedte a nyílot, de nem kapott stop parancsot, és tovább hajt, amíg összeomlik vagy elakad, és tele van hibákkal. Részben ezt a problémát úgy lehet megoldani, hogy megnöveljük a parancs elküldésének újbóli számát, azonban ez csak akkor lehetséges, ha saját maga használja a távirányítót. De egy kardinálisabb megoldást választok - átváltom a 433MHz adó-vevő használatára. Erről a következő cikkben fogok írni.
7. lépés: tegye fel a kerekeket.
Tehát egyszerűen le kell helyeznünk a fülkét az alvázra, feltenni a kerekeket és ellenőrizni kell a terepjáró működését.

