


A tervezésem részét a Lego Technic 42049 összeszerelési útmutatóból vettem át, a fennmaradó rész az én improvizációm. A felügyelethez egy androidos eszközhöz vagy számítógéphez csatlakoztatott Bluetooth modult fogok használni.
Szüksége van tehát:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 L9110S motormeghajtó
- 1 szervohajtás SG-90
- Bluetooth-modul HC-05 vagy azzal egyenértékű
- USB-UART arduino firmware-hez
- Mini sebességváltó motor 50 fordulat / perc
- Mini motoros sebességváltó 100 fordulat / perc
- Motoros váltó 6v 150 ford / perc
- 2 LED
- 2 ellenállás 150 ohm
- Kondenzátor 10v 1000uF
- 2 egysoros fésű PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA elem
- Csatlakozó apa-anya két érintkezővel a vezetékhez
- Homutik
- Különböző színű vezetékek
- forrasztható
- Rosin
- forrasztópáka
- 3x20 csavarok, anyák és alátétek számukra
- Csavarok 3x40
- Csavarok 3x60
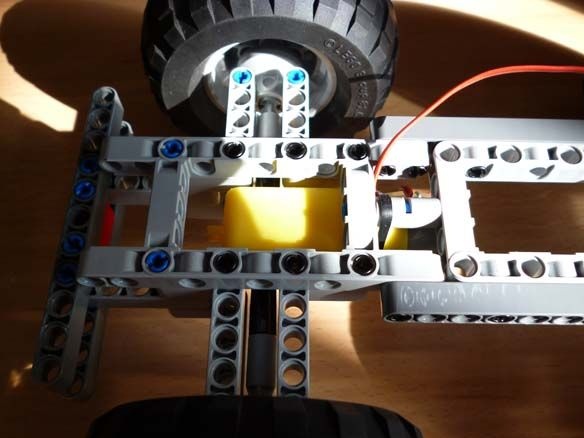
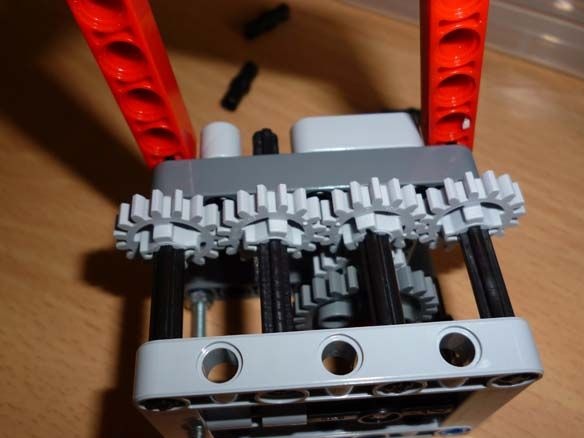
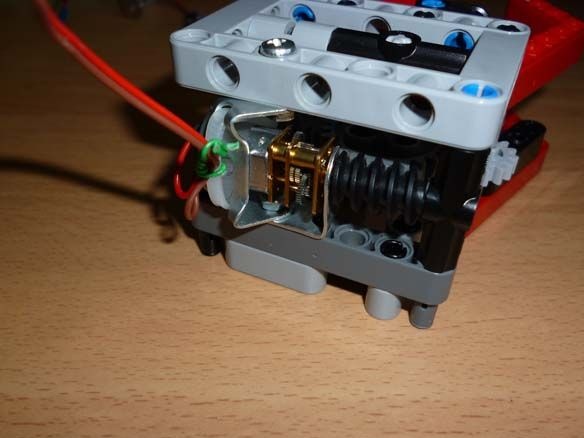
1. lépés Hátsó tengely szerelvény
A mozgáshoz hajtóműves motort használunk, amelynek 6 voltos motorja van, 150 fordulat / perc sebességgel. A sebességváltó tengelyét mindkét oldalról meg kell vágni, és rá kell helyezni a lego alkatrészekre. A hátsó tengelyt az alábbiak szerint szereljük össze:
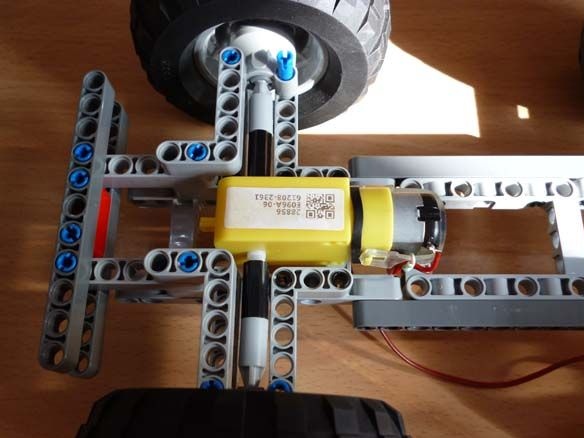
És a másik oldalról:
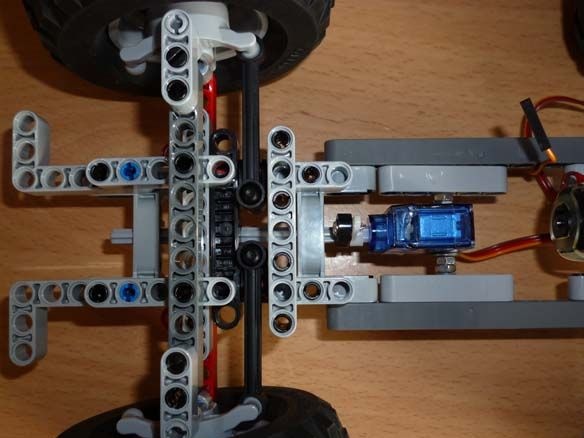
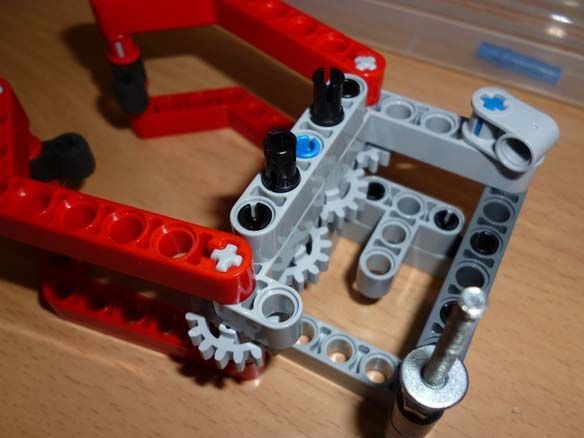
2. lépés Az első tengely összeszerelése
A kerekek forgatásához az SG-90 szervo jól használható. A modellre való rögzítéshez óvatosan fúrni kell, hogy ne érintse meg a szervó belső részeit, egy 3,2 mm átmérőjű átmenő lyukat, vagy csak vágja levélpapír késével. És vágja le a kiálló részeket („szárnyak” a rögzítéshez). Helyezzünk egy csavart a készített lyukba, és rögzítsük anyákkal. A szervótengelyre felteszünk egy kart egy lego csavarozott elemmel:

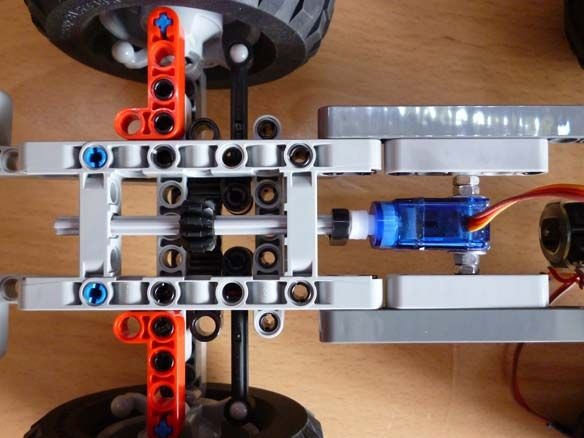
És a másik oldalról:
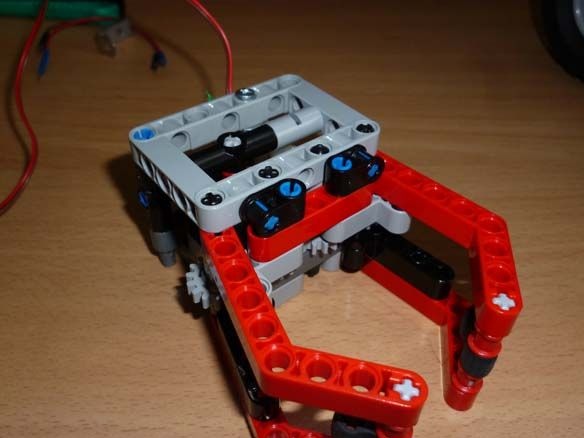
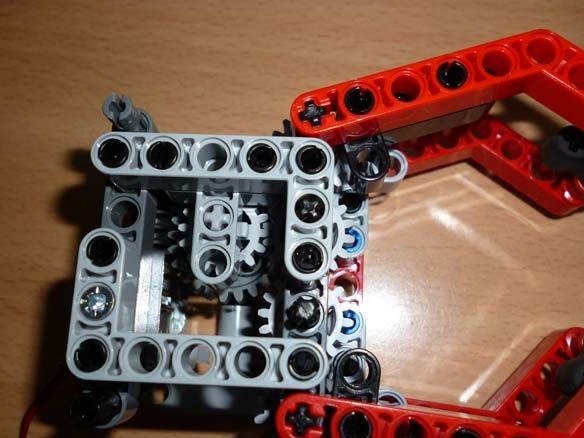
3. lépés Az alap és a fülke összeszerelése
Mindkét hidat a képen látható módon összekapcsoljuk:

Összeállítjuk a kabinot (a szépséghez szükséges):
A kabinot az alábbiak alapján alakítottuk:

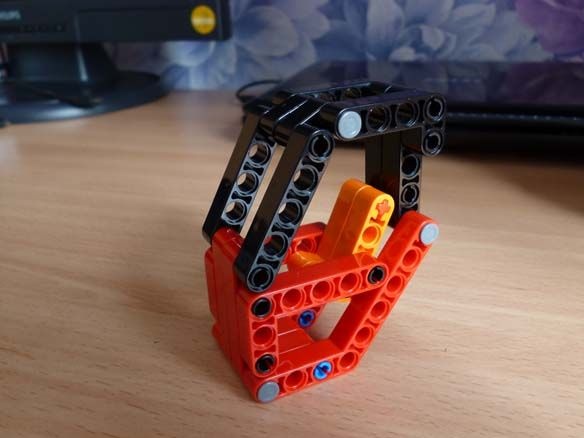
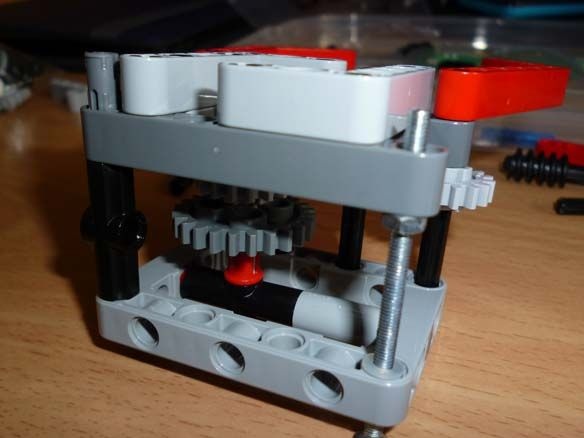
4. lépés Kupak vagy karom felhelyezése
A karomot egy mini motor sebességváltó hajtja, 50 fordulat / perc sebességgel. A hajtóműves motor és a tervező részei összekapcsolásának problémáját az alábbiak szerint oldottam meg: A hajtómotor tengelyére egy összekötő hüvelyt tettem, és egy rögzítőelemhez illesztett egy darabot. A felszereléshez a hajtómotor fém műanyagból és vasalóból készül. Kiderült, hogy a következő:

Ezután magát a karomot gyűjtjük a fotóból:

Rögzítjük az alaphoz:

A karom emeléséhez egy 100 fordulat / perc sebességű mini motor-váltó használható:


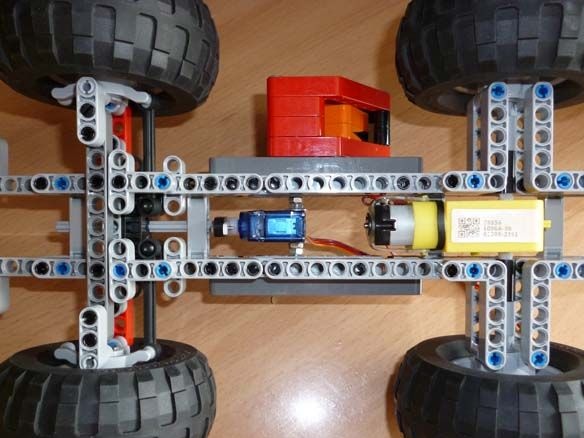
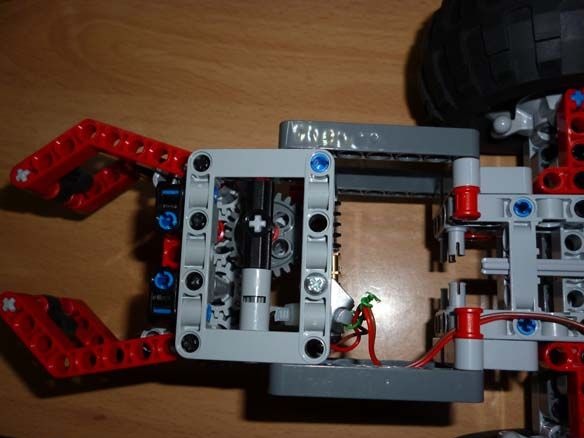
5. lépés Villanyszerelő
Az irányításhoz az Arduino Pro Mini-t és a Bluetooth modult fogjuk használni. A motorok csatlakoztatásához motormeghajtókra van szükség.
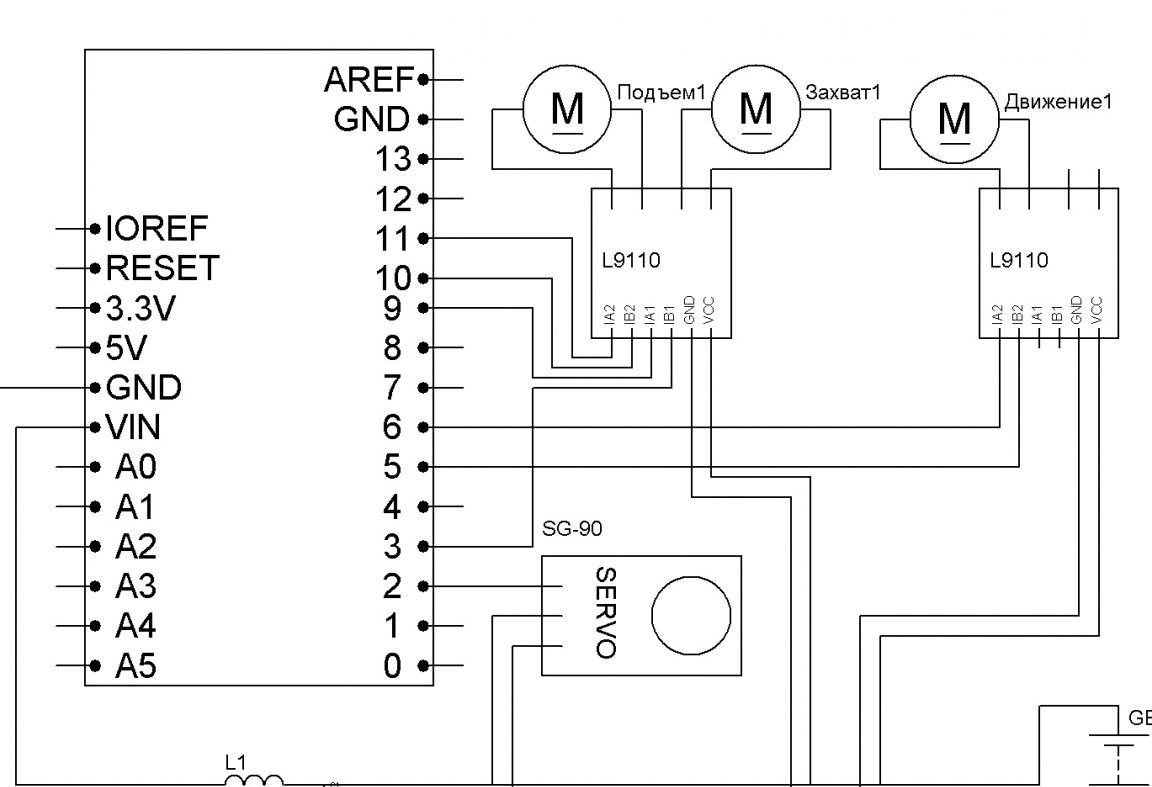
Minden alkatrész csatlakoztatása a Dupont anya-anya vezetékekkel.Teljesítmény - 6 NI-Mn 1.2v 1000mA elem sorba csatlakoztatva. Bármilyen alacsony teljesítményű kondenzátornak, valamint induktornak is megtalálnia kell a mikrokontroller teljesítményét. A két LED anódjai 4 tűs arduino-hoz, a katódok a GND-hez vannak csatlakoztatva. Az ellenállásokat az alkalmazott LED-ek kiválasztják. A kényelem kedvéért tekercselje le az elemeket szalaggal.

Az egészet kétoldalas ragasztóra ragasztjuk:

6. lépés: A Bluetooth beállítása
Ma a legolcsóbb Bluetooth modulok a HC-05 és a HC-06. Rengeteg a kínai online áruházakban. A különbség közöttük az, hogy az első egyaránt működhet master módban (slave) és slave módban (master). A második tisztán rabszolga eszköz. Más szavakkal, a HC-06 nem képes felismerni egy párosított eszközt, és nem tud vele kapcsolatot létesíteni, csak engedelmeskedik a mesternek.
A modulok rövid jellemzői:
- Bluetooth chip - BC417143, gyártó
- kommunikációs protokoll - Bluetooth specifikáció v2.0 + EDR;
- a hatás sugara - legfeljebb 10 méter (2. teljesítményszint);
- Kompatibilis az összes SPP-t támogató Bluetooth adapterrel;
- A flash memória mennyisége (a firmware és a beállítások tárolására) - 8 Mbit;
- a rádiójel frekvenciája - 2,40 .. 2,48 GHz;
- host interfész - USB 1.1 / 2.0 vagy UART;
- energiafogyasztás - a kommunikáció során az áram 30-40 mA. Az átlagos áramérték körülbelül 25 mA. A kapcsolat létrehozása után a felhasznált áram 8 mA. Nincs alvó üzemmód.
A modulokat általában két, egymással összeforrasztott lapként értékesítik. A kisebb egy gyári modul, amelyet széles körben használnak különféle rendszerekben elektronikus eszközöket. Nagy - speciális kenyérlemez barkácsoláshoz. Úgy néz ki, mint egy kisebb deszka egy BC417 chippel:

Tehát maguk is a HC-05 és a HC-06 barkács modulok:
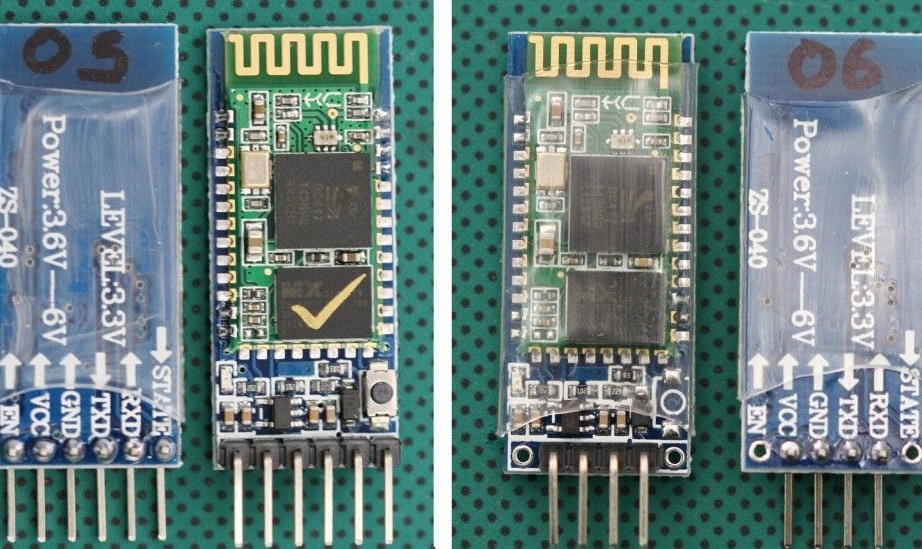
Alapvetően bármilyen modult használhat. A kenyérlemez nélküli modul kevesebbet fizet, de akkor a modul 3,3 V-os áramellátásáról gondoskodnia kell, és magának kell kínoznia a modulhoz vezetékek forrasztásával. Választottam az optimálisnak, véleményem szerint a HC-06 ár / funkcionális arányban.
Összekapcsoljuk az alábbiak szerint:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND –GND
A megfelelő működéshez a modult konfigurálni kell. A terminál ablakába bevitt AT parancsokat konfiguráljuk. Példát adok a HC-05 modul beállítására. Ha más van a beállítás, akkor más is lehet. Annak érdekében, hogy modulunk parancsokat kapjon, először az Arduino-t a következő firmware-lel villogjuk:
Ebben az esetben Arduino hídként szolgál a számítógépek és a modul között. A firmware-ben a SoftwareSerial könyvtárat használom. Nagy sebességgel instabil módon működik. Ha nagy sebességre van szüksége, akkor közvetlenül csatlakoztathatja a modult az Arduino RX és TX kapcsolatokhoz, és átírhatja a firmware-t. De az én esetemben a modullal 9600 sebességgel fogunk dolgozni. Tehát a firmware után nyissuk meg a terminált és írjuk be:
„AT” (idézőjelek nélkül) az „OK” válasznak kell lennie (akkor minden jól csatlakozik, és a modul működik)
„AT + BAUD96000” (idézőjelek nélkül) az „OK9600” választ kell adni.
Ha a helyes válasz van, folytassa a következő lépéssel.
7. lépés Firmware
A firmware és a firmware írására az Arduino IDE készüléket használom. A mai jelenlegi változat 1.8. Valójában firmware:
8. lépés Állítsa be a telefont.
Android-telefonon telepítenie kell egy programot a robot Bluetooth-on keresztüli vezérléséhez. Nagyon sok van ezek közül. Beírhatja a „Bluetooth Arduino” kifejezést a Google Playbe, és választhatja az ízlése szerint. Tetszett a BT vezérlő. Töltse le és telepítse Android telefonjára vagy táblagépére. Ezután az Android beállításokon keresztül kapcsolatot kell létesítenie a modulunkkal. A kapcsolat jelszava „1234” vagy „0000”. Ezután állítsa be a programot a megfelelő parancsokhoz. A lista az alábbiakban található.
9. lépés A számítógép beállítása (ha szükséges)
Szükség esetén, vagy csak az ellenőrzés érdekében, használhat számítógépet vagy laptopot. Ehhez a számítógépnek Bluetooth-nal kell rendelkeznie. Kommunikációt létesítünk modulunkkal a számítógép vezérlőelemein keresztül. Ezután szükségünk van egy terminálra a parancsok küldéséhez. Bármely kényelmes az Ön számára. A firmware rögzítése után a vezérlés a következő gombokkal (parancsokkal) történik:
W - előre
S - hát
A - balra
D - igaz
F - stop
G - kormánykerék
K - fényszórók
L - a fényszóró kikapcsolt
R - emelje fel
E - lefelé
Q - stop lift
T - rögzítés
Y - Engedje el
H - Stop Claw
A parancsok folyamatos bevitele kényelmetlen, ezért javaslom a program használatát parancsok küldésére. A Z-Controllert használom.A programban válassza ki a portot (azt a portot, amelyen keresztül a kapcsolat létrejön), és konfigurálja a parancsok gombjait. Állítsa alapjáraton és intuitív módon.
