


Ebben a cikkben a varázsló megmutatja nekünk, hogyan készítette a színészi Lego 60193 Arctic Air Transport helikoptert a modell quadrocopter. A quadrocopter gyártásának fő feladata a repülési tulajdonságok mellett a lehető legtöbb eredeti alkatrész megtakarítása volt.
Nézzünk meg egy rövid videót, amely bemutatja a quadrocopter működését.
Tehát egy ilyen quadrocopter gyártásához a mester a következőket alkalmazta
Szerszámok és anyagok:
-LEGO városi sarkvidéki helikopter - 60193:
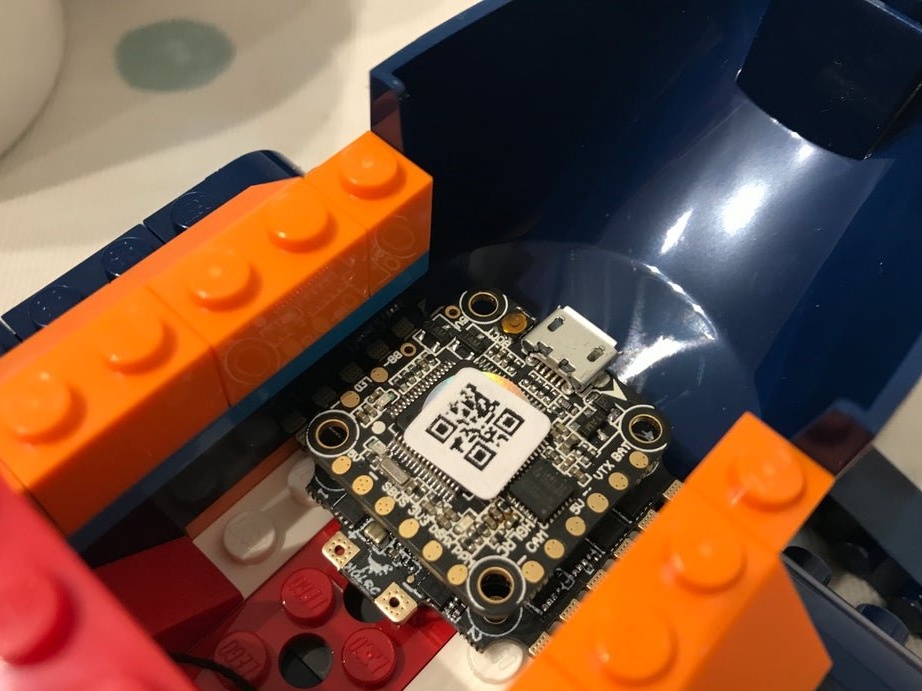
- Vezérlő és ESC 20x20 mm, például HGLRC XJB F428 Micro F4 AIO OSD;
- Kefe nélküli motorok - 4 db;
-Propellery;
-Akkumulátor 950 mAh;
-Razemy;
seeing-;
-Rádió modul (adó és vevő);
-Krepezh;
-Nozh;
- Forrasztópáka;
- Ragasztópisztoly;
- csavarhúzó;
-Drel;
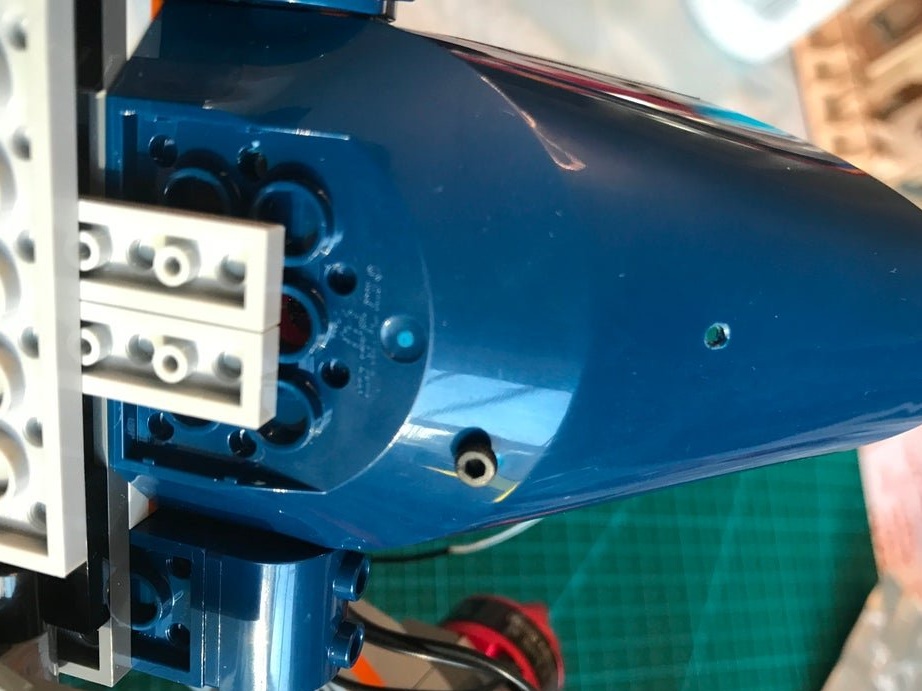
Első lépés: Lego Build
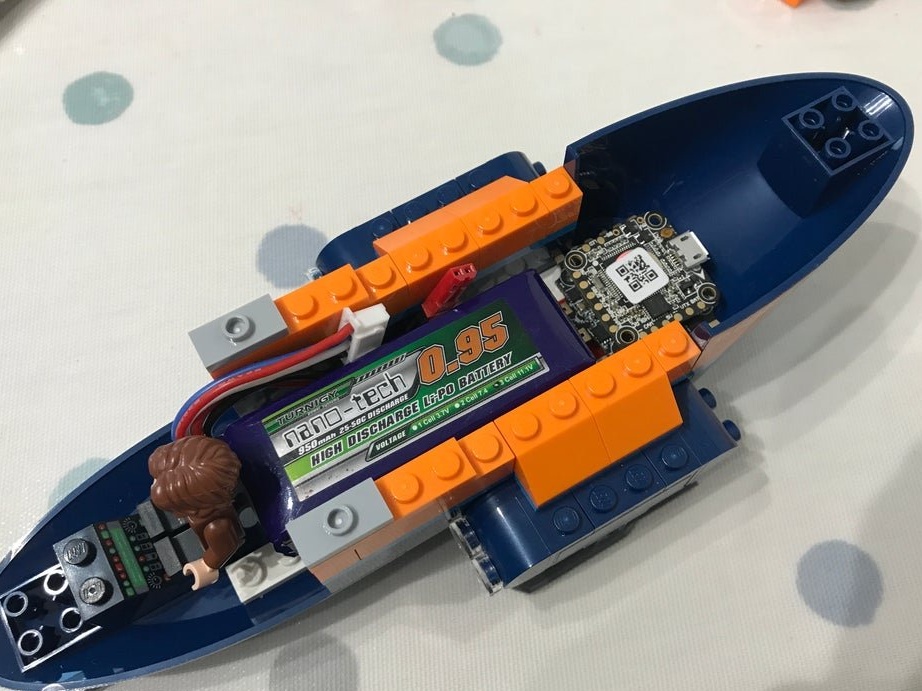
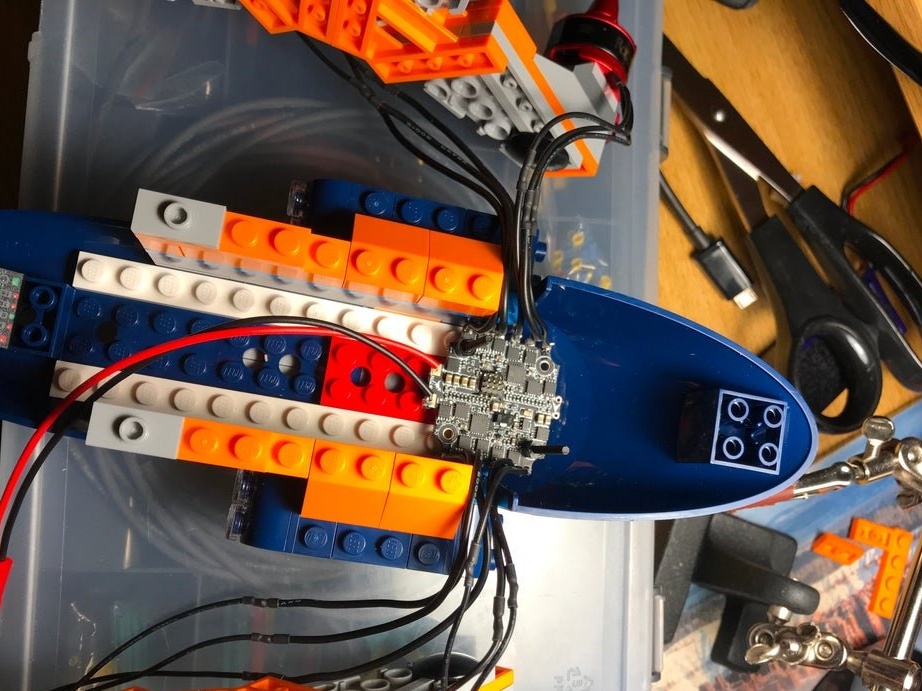
Először a mester összegyűjti a LEGO-sarkvidéket. Ezután a modell részleges szétszerelése. Belül helyeznie kell az elemet és a vezérlőt, figyelembe véve a modell kiegyensúlyozását.


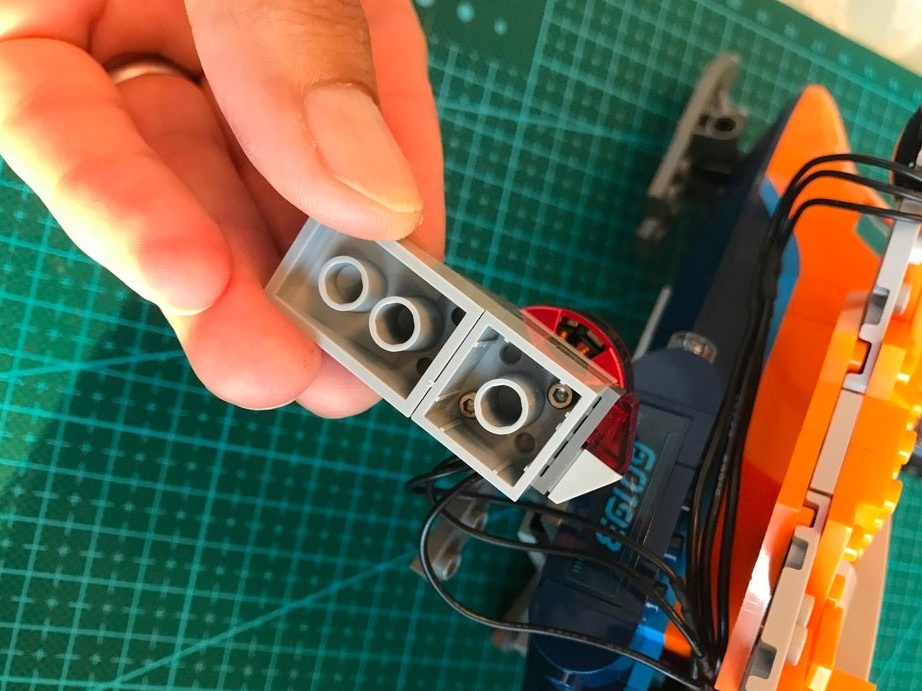
Második lépés: Motor felszerelése
A szabványos 1806 kefe nélküli motor rögzítőfuratai nagyjából megegyeznek a szabványos LEGO 2x2 lemez csapszegeivel. Minden, a quadrocopterre szerelt „motor” -tartónak van egy 2x2-es sötétszürke lapja (LEGO 3022) és egy 2x2-es világosszürke lapja függőleges csappal (LEGO 2460), amelyet általában a LEGO-hajtócsavarok tetején tartanak.
A mester fúrja a rögzítő lyukakat. A motorok közepén apály van. A csempe közepébe egy lyukat fúrunk. Biztosítja a motorokat.








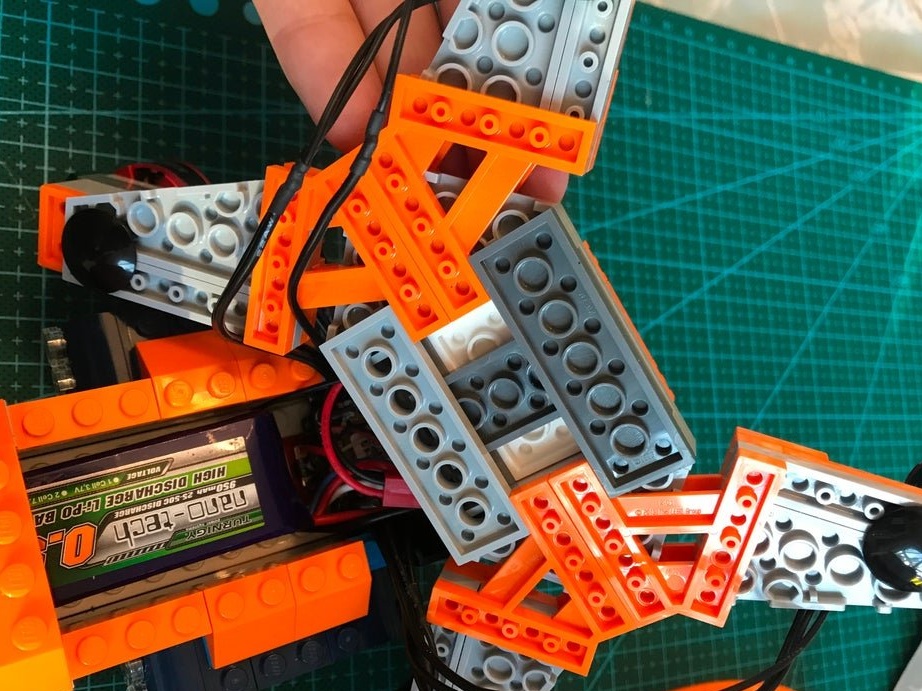
Harmadik lépés: Váll
Átrendezve a quadrocopter vállát, kissé megváltoztathatja az elrendezést, hogy szélesebb vagy szűkebb elrendezést biztosítson a motorok és a csavarok egymáshoz viszonyítva.
A szokásos LEGO szerelvénynek (az első fotó) „vállai” vannak és a motorok széles (vízszintesen) helyezkednek el, meglehetősen nagy csavaros átfedéssel. A mester újrakészíti a „vállakat”, és dobja a motort, és ennek megfelelően a csavarokat.



Negyedik lépés: elektronika
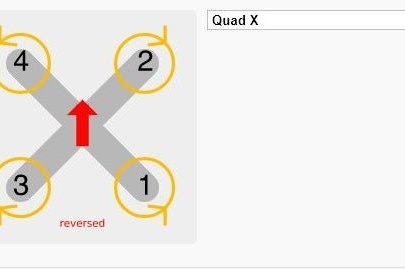
A rendszer szerint elektronikát telepít. Az első fotó a motorok forgásirányának vázlatát mutatja. A forgásirány a programozási szakaszban is megváltoztatható.
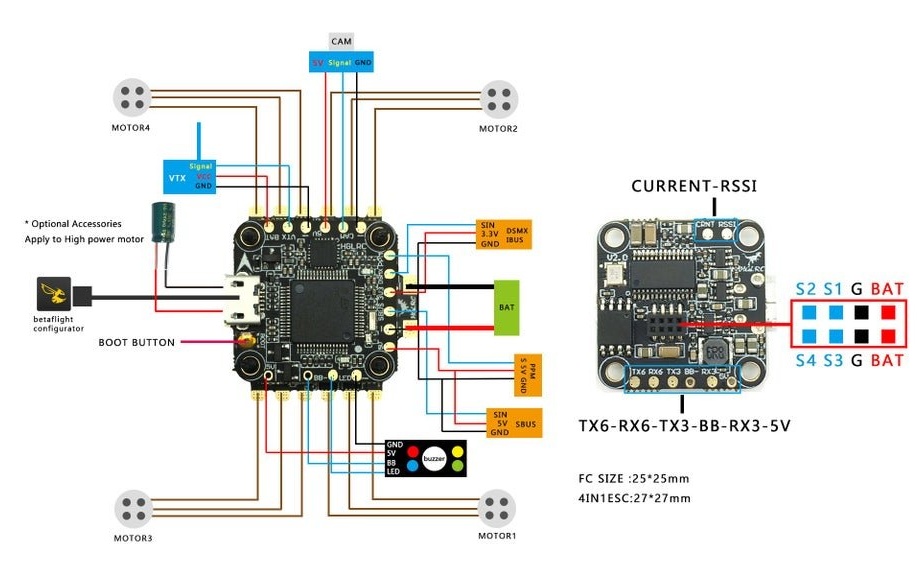

A telepítés befejezése után és az akkumulátor csatlakoztatása előtt a varázsló ellenőrzi a csatlakozásokat, hogy elkerülje a törést vagy a rövidzárlatot.
Amikor bekapcsolja a készüléket, látnia kell a repülõgép irányítófényeit és néhány sípolást az ESC-tõl.
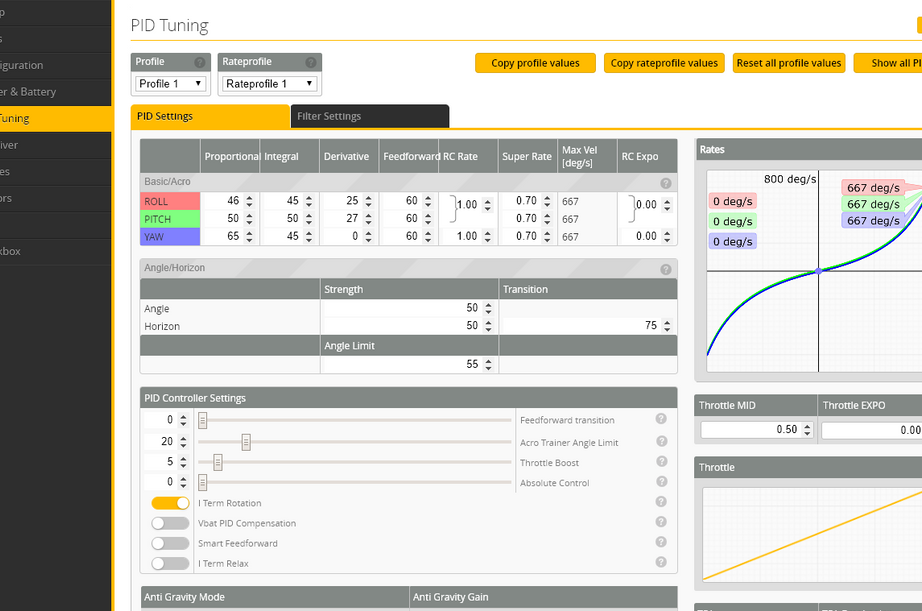
Ötödik lépés: Beállítás
Most, hogy minden csatlakoztatva van, ideje konfigurálni a vezérlőt.Ez azt jelenti, hogy letölti a szoftvert (beágyazott szoftvert), amely elvégzi a vezérlőjelek dekódolását az RC adóról, feldolgozza az érzékelő bemeneti jelét (gyorsító, giroszkópok), és vezérlőjeleket biztosít az ESC számára a motorok adott fordulatszámon történő forgatásához.
A biztonság érdekében vegye le a légcsavarokat! Az akkumulátor nem szükséges az első néhány beállítási lépéshez, csak USB tápellátás szükséges.
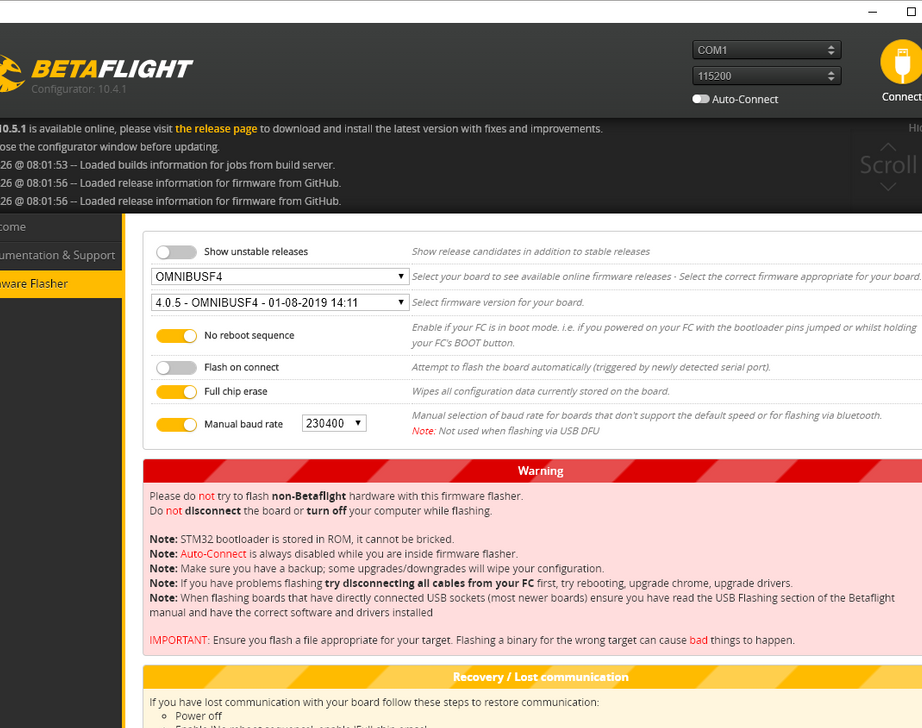
Töltse le a Beta Configurator alkalmazást
Csatlakoztassa a mikro-USB-kábelt a repülési irányítóhoz. Felhívjuk figyelmét, hogy ezt könnyebben lehet megtenni, ha a vezérlőt nem csavarják be az alvázra.
Töltse le és töltse fel a megfelelő vezérlőprogramot a repülési irányító számára.
betaflight-settings-legoquad.txt
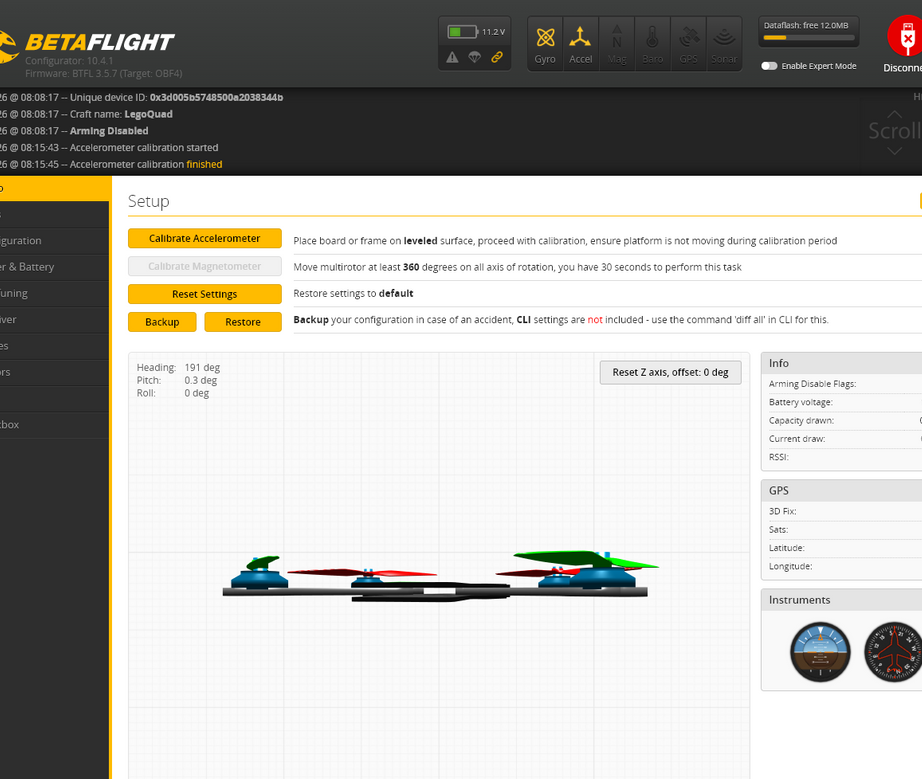
Kattintson a „Csatlakozás” gombra, és konfigurálja a következő beállításokat:
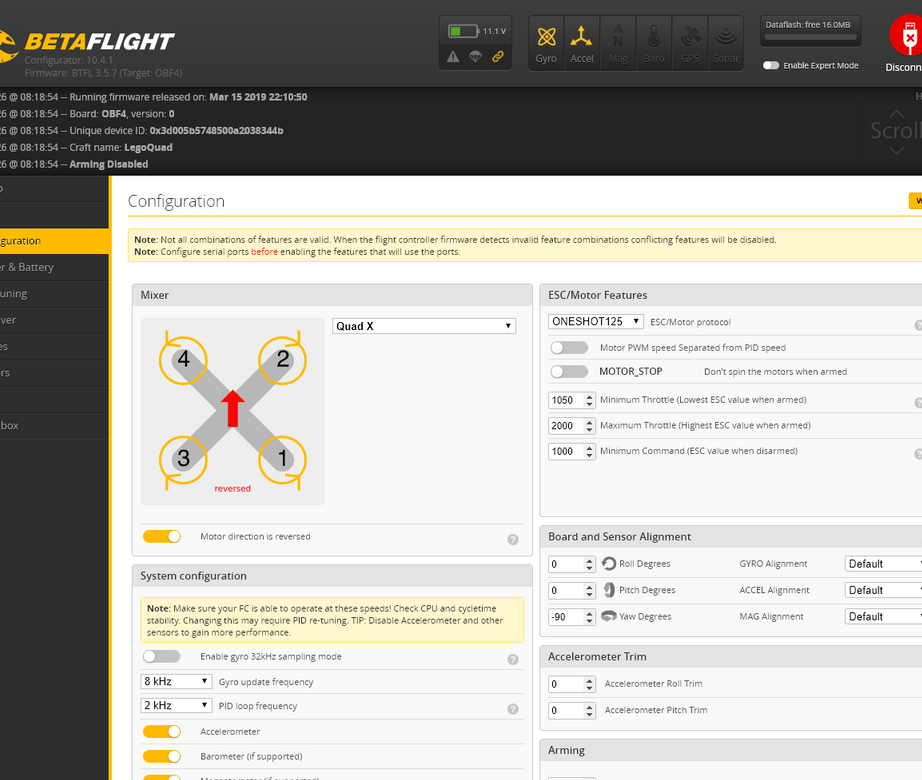
1. Beállítás - a motorok kalibrálása
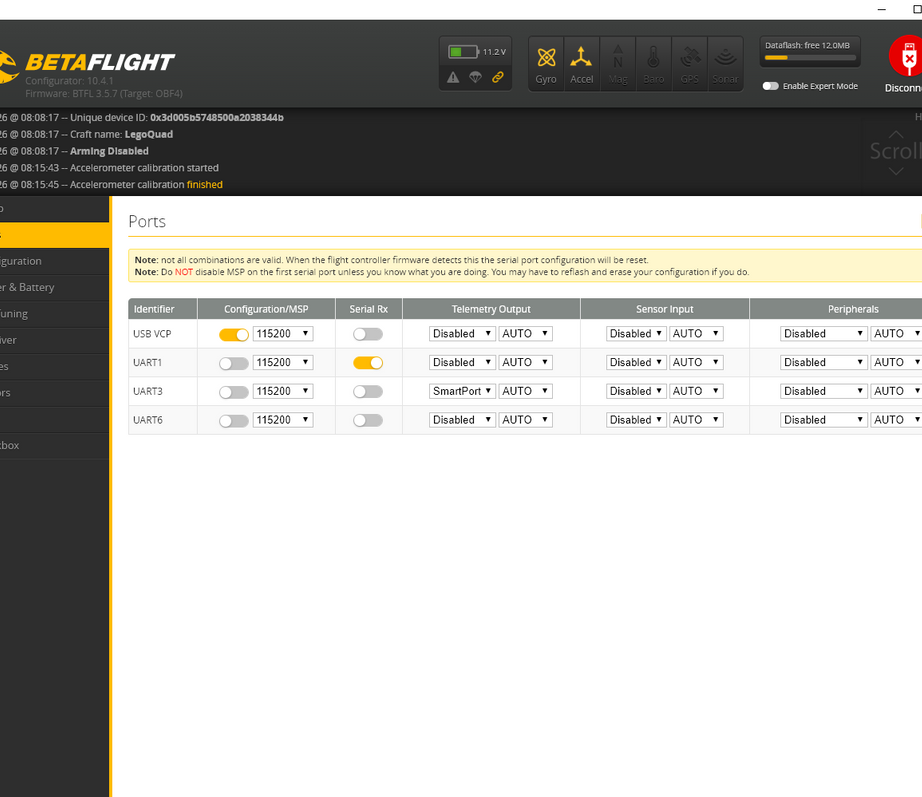
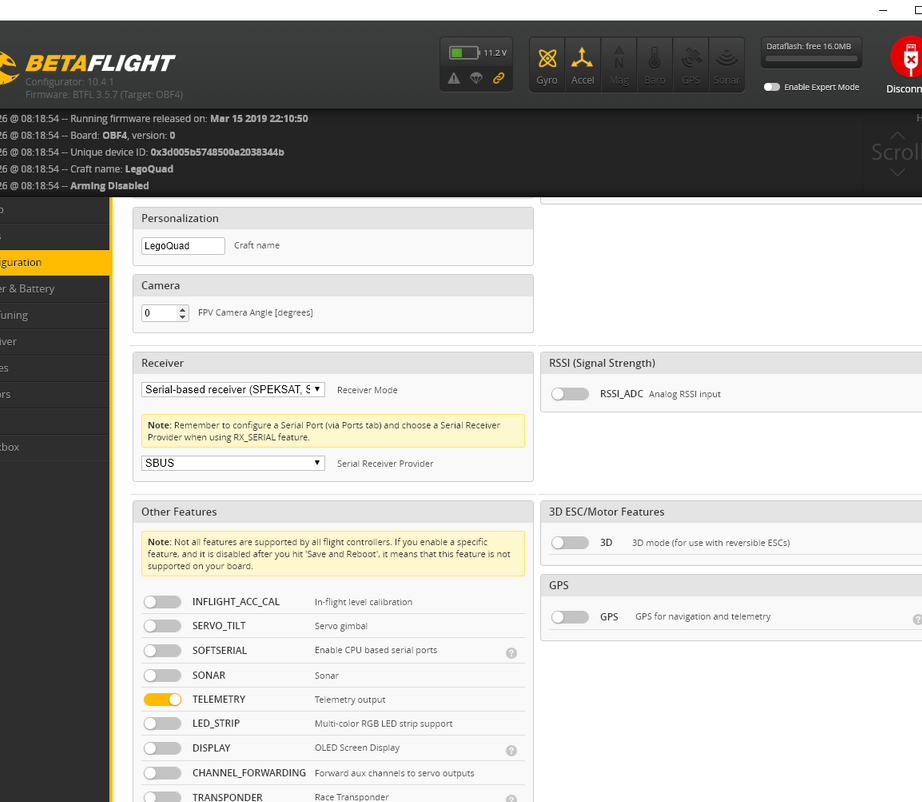
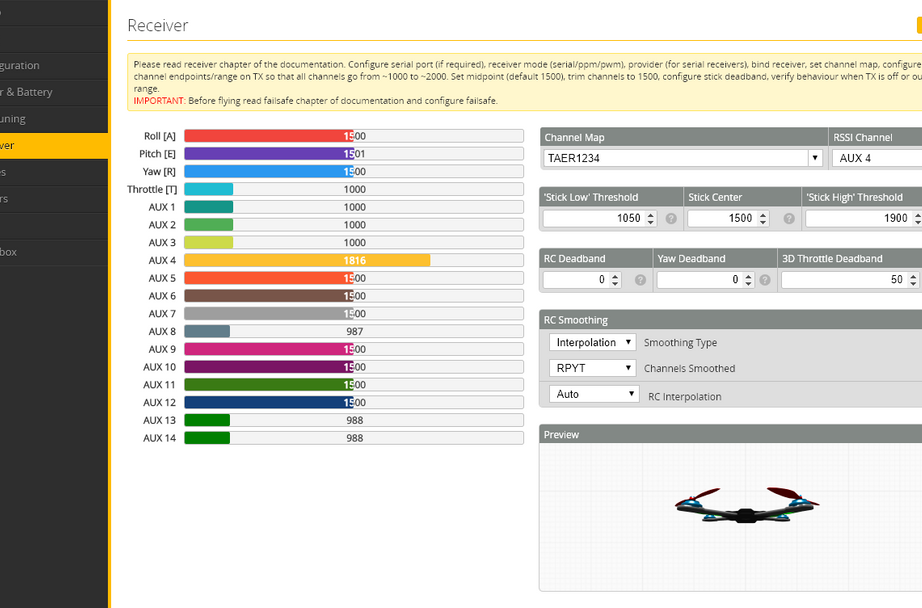
2. Adja meg a portokat - UART1 - Serial RX az SBUS RC vevő csatlakoztatásához
3. Mentés és újraindítás
4. Hozzon létre kapcsolatot a vevő és az adó között
5. Túlterhelés
6. A PID master értékét 250-re állítja
7 Csatlakoztassa az akkumulátort
8. Állítsa be a feszültséget.
9. Ellenőrizze, hogy a csatorna kijelzője és a vezérlő iránya megfelelő-e, amikor minden beállítva, a quadcopter modellképének a jobb alsó sarokban minden helyes irányba kell mozognia, amikor az RC vezérlőn a joystickot mozgatja.
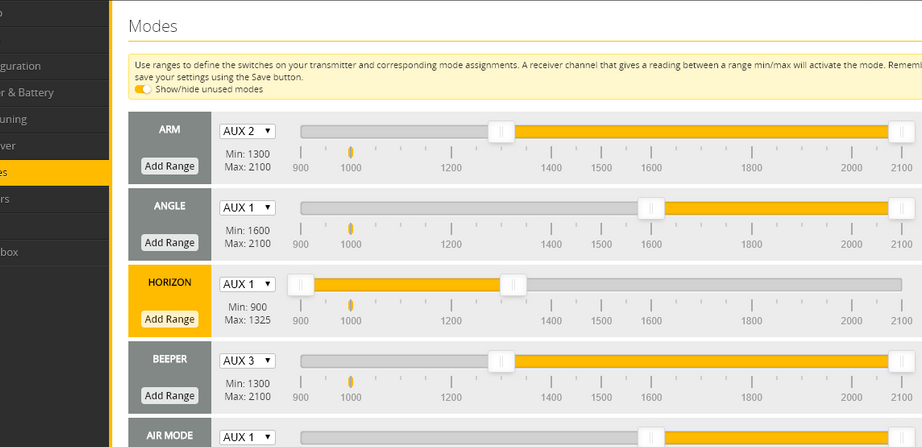
Konfigurálja az üzemmódokat.
ARM be / ki
HORIZON önterülő / ACRO a hagyományos FPV repüléshez
SIPER - Hasznos, ha a magas fűben vagy bokrokban elveszíti a modellt.
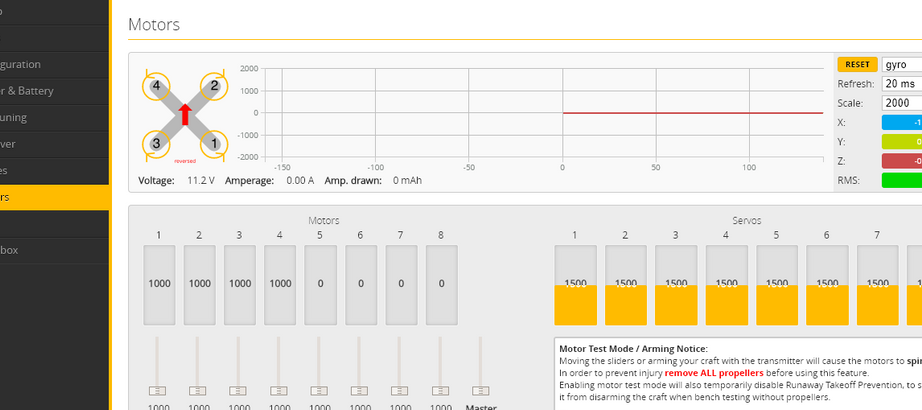
„Motorok” fül - használja ezt az opciót az egyes motorok külön-külön ellenőrzéséhez, és ami fontos, jelölje meg az egyes motorok forgásirányát
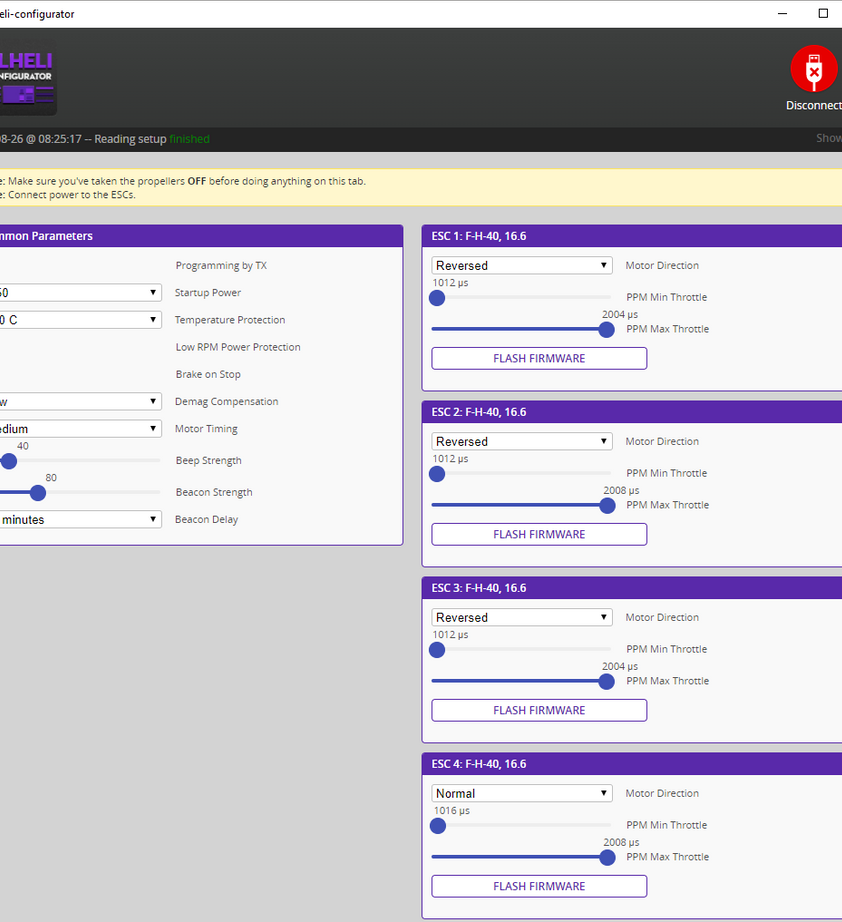
Javítsa ki a rossz forgásirányt a BLHELI konfigurátorral
A fenti lépések elvégzése után húzza ki az USB-t és az akkumulátort, majd kapcsolja be a készüléket és ellenőrizze, hogy minden működik-e:
Kapcsolja be az adót és a készüléket
Csatlakoztassa az akkumulátort, és szerelje fel a quadrocoptert egy sima felületre
Kapcsolja be az ARM kapcsolót, és a motoroknak alacsony fordulatszámon kell elindulniuk.
Ellenőrizze a fojtószelepet, miközben növeli a sebességet
Vízszintes üzemmódban próbáljon meg dönteni a quadrocoptert, és ellenőrizze, hogy a motorok megfelelően reagálnak - például döntse előre és az első motorok felgyorsulnak.

Hatodik lépés: Záró összeállítás
Gyakorlatilag az eset egészét rögzítő zárakkal tartják. A mester csak melegen olvadt ragasztót használ a motorok felszereléséhez.


Minden kész és kipróbálható.



