A mestert már régóta érdekli a repülőgépmodellek. Eleinte repülőgép-modell volt, majd négykerekű. Ebben a cikkben a varázsló elmondja, milyen anyagokat jobb választani a quadrocopterhez, valamint arról, hogy miként készíthető keret rétegelt lemezből. Nézzük meg egy rövid bemutató videót.
Quadrocopter készítéséhez a mester a következőket alkalmazta
Szerszámok és anyagok:
- Nyír furnér;
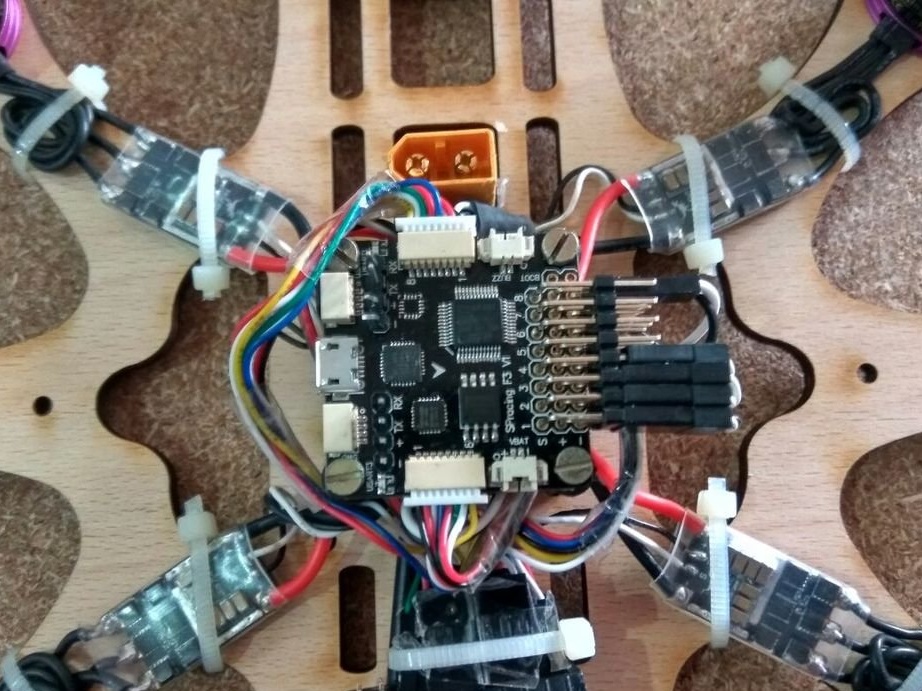
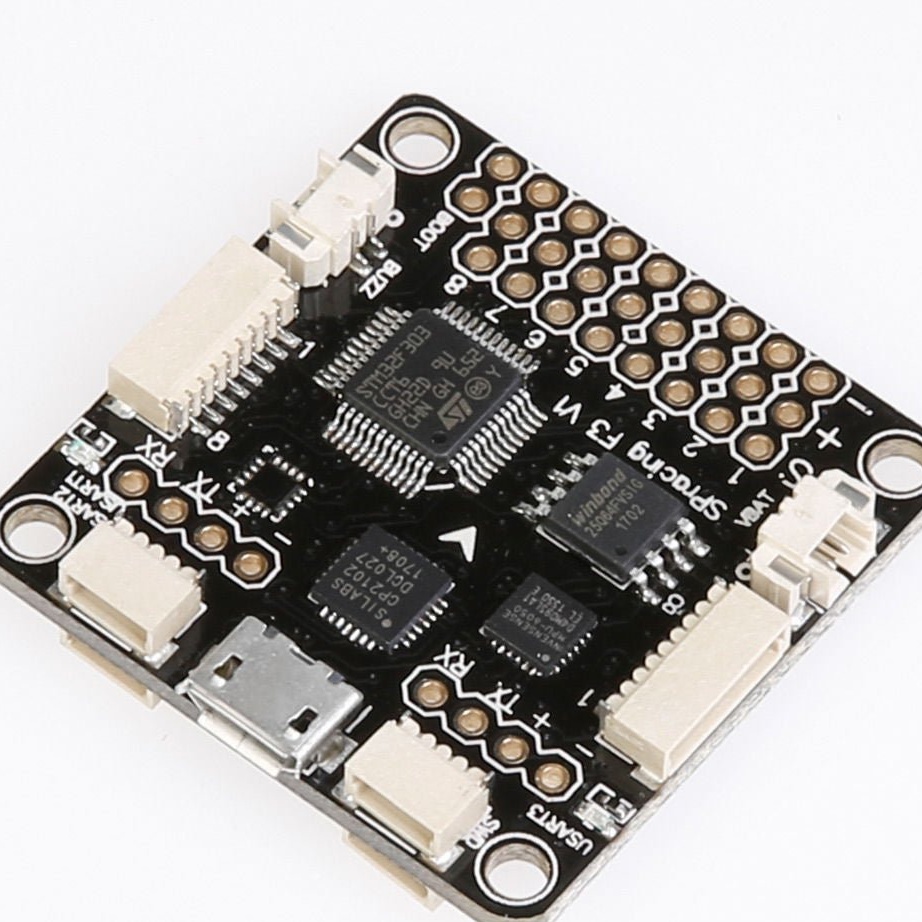
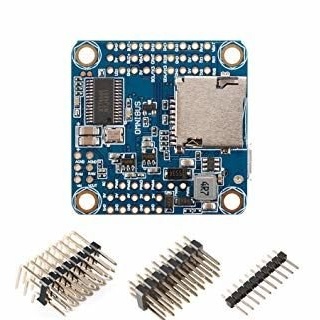
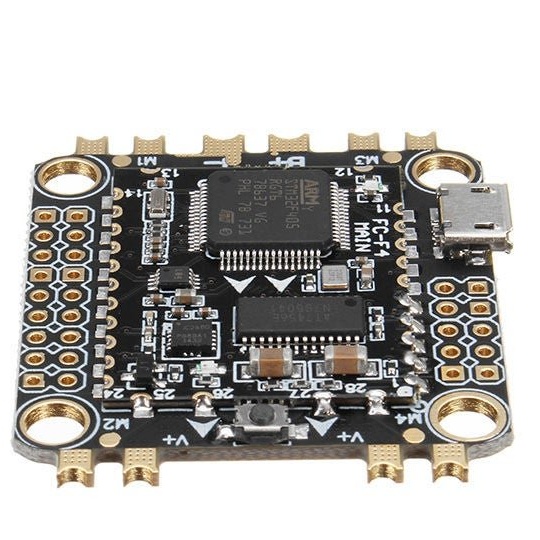
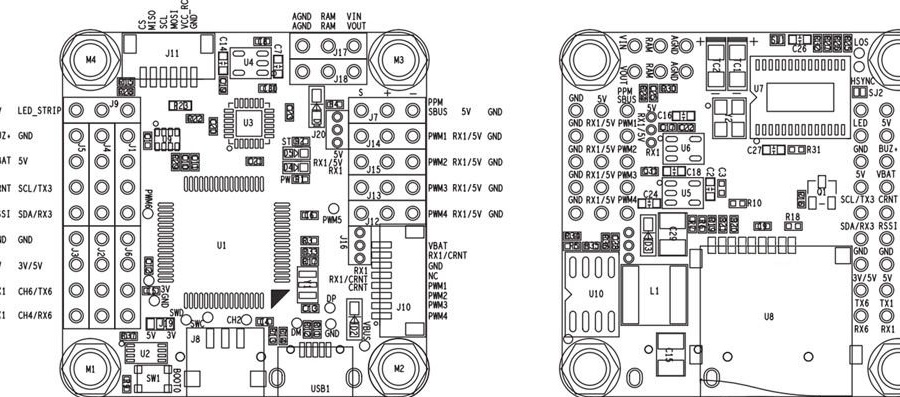
-Omnibus F4 vezérlő, SP Racing F3;
-Mateck tápegység;
- HGLRC 28A BLHeli ESC vezérlő - 4 db;
- Motor Racestar BR2204 2600Kv Racing Edition -4 db;
- KingKong 5X4X3 hajtócsavarok - 4 db;
- Flsky TH9X rádiómodul vevővel;
Akkumulátor objektíve: 3800 mAh;
ellenálló; - 16 db;
-Csavarok M3;
- csavarhúzó;
- Forrasztási kiegészítők;
-Nozh;
- CNC vágó;
Első lépés: Anyagkiválasztás
Frame.
A keret általában könnyű és merev alkatrészekből, például üvegszálból, szénszálból, fából, alumíniumból, stb. Készül. Sokféle típusú keret létezik, a mester négy motort keretet készít.
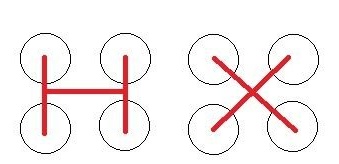
Az ilyen keretek elsősorban H-alakban vagy X-alakban vannak. Az X-alak jó egyensúlyt teremt a stabilitás és a manőverezhetőség között. Ezt a keretet fogja készíteni a mester.

Controller.
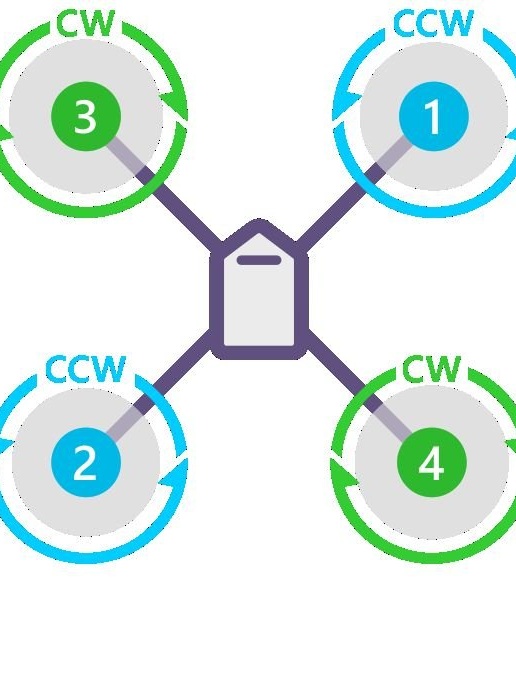
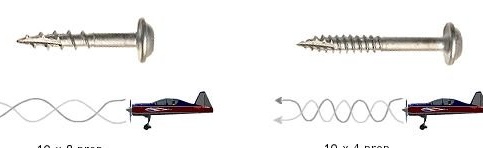
A vezérlő vezérli a motorok működését. A diagram azt mutatja, hogy az összes motor ellentétes irányba forog, hogy semlegesítse az egyes motorok által generált nyomatékot. A vezérlő a quadrocopter agya, alapvetően egy kicsi számítógép, amely érzékelőivel folyamatosan méri a szöget és a sebességet.
A repülésvezérlőket elsősorban a processzor specifikációi szerint osztályozzák.

Motorokhoz.
Kétféle motor létezik: kefe nélküli motorok és kefe nélküli motorok. A legtöbb quadrocopter kefe nélküli motorokat használ, amelyek nagyon gyorsan reagálnak a sebesség- és nyomatékigény változásaira. Kefe nélküli motorokhoz, speciális elektronikus sebességszabályozó (ESC).
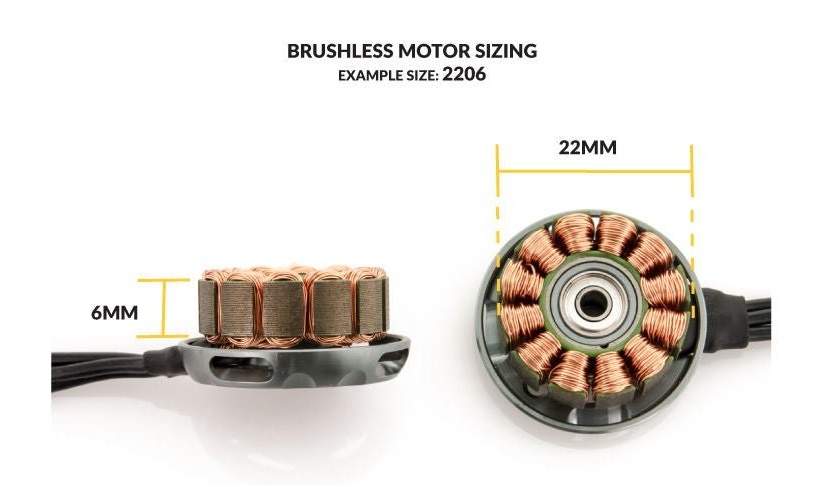
A kefe nélküli motorok méretét négyjegyű szám jelzi - AABB. „AA” az állórész szélessége, a „BB” pedig az állórész magassága vagy az állórész átmérője, mind mm-ben (milliméterben). Például a Racestar BR2205 állórésze körülbelül 22 mm átmérőjű és körülbelül 05 mm magas.
Valójában, minél magasabb az állórész, annál nagyobb az energia nagyobb sebességnél, és minél szélesebb az állórész, annál nagyobb a nyomaték alacsonyabb sebességeknél.
A motor KV értéke azt a sebességet jelzi, amellyel a motor forog, amikor 1 voltos tekercset alkalmaz.Ezt a rézhuzal tekercselésének száma a motor-állórészben és a mágnesek mágneses erő határozza meg.
A kevesebb tekercs kevesebb ellenállást jelent, ezért magasabb fordulatszámot jelent. Ez az oka annak, hogy a magasabb KV-vel rendelkező motorok kevesebb állórész-tekercset használnak.
A KV meghatározza, hogy melyik csavart használhatja a motorral. Minél alacsonyabb a KV, annál nagyobb a csavar képes forogni, és fordítva. Nem lehet növelni az emelési erőt egy nagyobb csavar behelyezésével a motorra, magasabb KV-vel, mivel a nyomatékkal szemben támasztott követelmények meghaladják a megengedett teljesítményt, és a motor túlmelegszik.
Például: A BR2205 2600 kV-os motorok 5x4 hüvelykes csavarokkal működhetnek, a BR2212 1000 kV-os motorok pedig 10x4,5 hüvelykes csavarokkal működhetnek.
A KV egyáltalán nem jelzi a motor teljesítményét; a nagyobb KV-vel rendelkező motorok nem feltétlenül erősebbek, mint az alacsonyabb KV-vel rendelkező motorok.


Elektronikus sebességszabályozók (ESC).
A mini quadrocopterekben a közelmúltban elért haladást lehetővé tette olyan kicsi elektronikus sebességszabályozók megjelenése, amelyek lehetővé teszik az ecset nélküli motorok működését. Az elektronikus fordulatszám-szabályozók úgy működnek, hogy a fojtószelep jelet fogadják a repülési irányítótól, és fenntartják a motor forgását a kívánt sebességgel.
Számos technológia működik ezekben a kis eszközökben, amelyek kívül esnek a kézikönyv hatályán. Vásárláskor válasszon egy olyan ESC-t, amelynek névleges egyenárama legalább 20% -kal nagyobb, mint a számított.


Propellerek.
A légcsavarok a motorok mechanikus energiáját vontatóvá alakítják. A légcsavar mérete és alakja óriási szerepet játszik a repülés hatékonyságában.
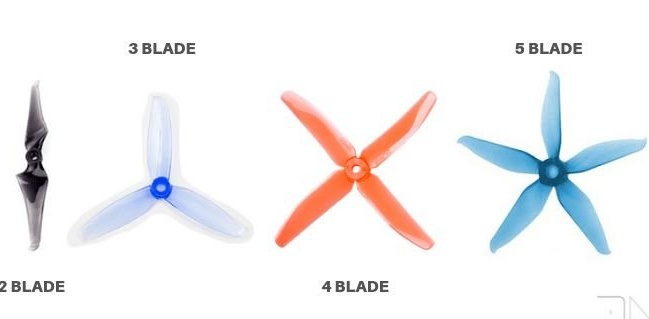
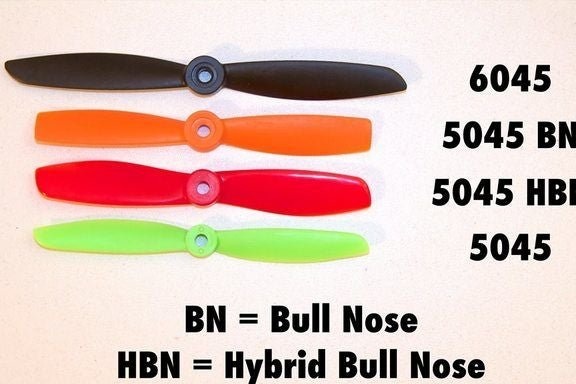
Kétféle formátum létezik, amelyeket a gyártók használnak: L x P x B | LLPP x B. Hol, L a hosszúság, P a hangmagasság, B a pengék száma.
A hajócsavarok különféle anyagokból készülhetnek, például műanyag kompozitból, szénszálból, fából stb. Az egyes anyagtípusok egyedi tulajdonságokkal rendelkeznek, például a szénszál és a fa valóban merev, sima működésükről ismertek, és néhány műanyag rendkívül tartós. A mini quadrocopterekben használt csavarok többsége műanyag kompozitokból készül.
A felhasználható légcsavar méretét korlátozza a keret mérete, valamint a motor nagy teljesítményű teljesítménye. Általános szabály, hogy minél több légcsavart használhat egy bizonyos tolóerő létrehozásához, annál hatékonyabb lesz. A mini quadrocopterek esetében 5-6 hüvelykes csavarok között változhatnak, 4-5 hüvelyk lépésekben.
A pengék száma befolyásolja a tapadást és az energiafogyasztást. Minél több penge van, annál több a tapadás és annál több energiát pazarol el.

Akkumulátort.
Jelenleg a legtöbb drón lítium polimer akkumulátort használ, azaz Lipo akkumulátort ismert. Az akkumulátor, az ESC-vel és a motorral együtt négykerekű energiaellátó rendszer.
Ne gondolja az akkumulátort mint az energiatárolót, mert a motorok rendkívül sok ampert tudnak húzni nagyon rövid időközönként. A LiPo akkumulátorok cellákból állnak, amelyek mindegyikének névleges feszültsége 3,7 V. Ha nagyobb feszültségre van szükség, ezeket az elemeket sorosan össze lehet kapcsolni egy elem létrehozásához. A sorba kapcsolt akkumulátorokat „S” betűvel és a „P” betűvel párhuzamosan jelölik.
Minél több cellát sorba kapcsolnak, annál nagyobb a feszültség és minél több cellát párhuzamosan, annál nagyobb a kapacitás.
Például:
1S = 1 cella = 3,7 V
2S = 2 sejt = 7,4 V
3S = 3 cella = 11,1 V
4S = 4 sejt = 14,8 V
5S = 5 sejt = 18,5 V
6S = 6 sejt = 22,2 V
A kapacitást milliamperben vagy „mAh-ban” kell megadni. Ez az akkumulátor töltöttsége amperben, amely egy óra alatt képes kiszolgálni. Például egy 3S 2000 mAh akkumulátor 2 A-t képes biztosítani 1 órán keresztül. tehát ha a quadcopter 20A-t húz, akkor repülése 2/20 * 60 perc = 6 percig folytatódik.
A névleges kisülés azt a maximális sebességet jelzi, amellyel áramot lehet venni az akkumulátorról. A tetején a "C" szám jelzi. Minél magasabb a C besorolás, annál nagyobb az akkumulátor által biztosított áram.
Például egy 2000 mAh-os 25C akkumulátor akár 2000x25 = 50 000 mA vagy 50 A teljesítményre képes.



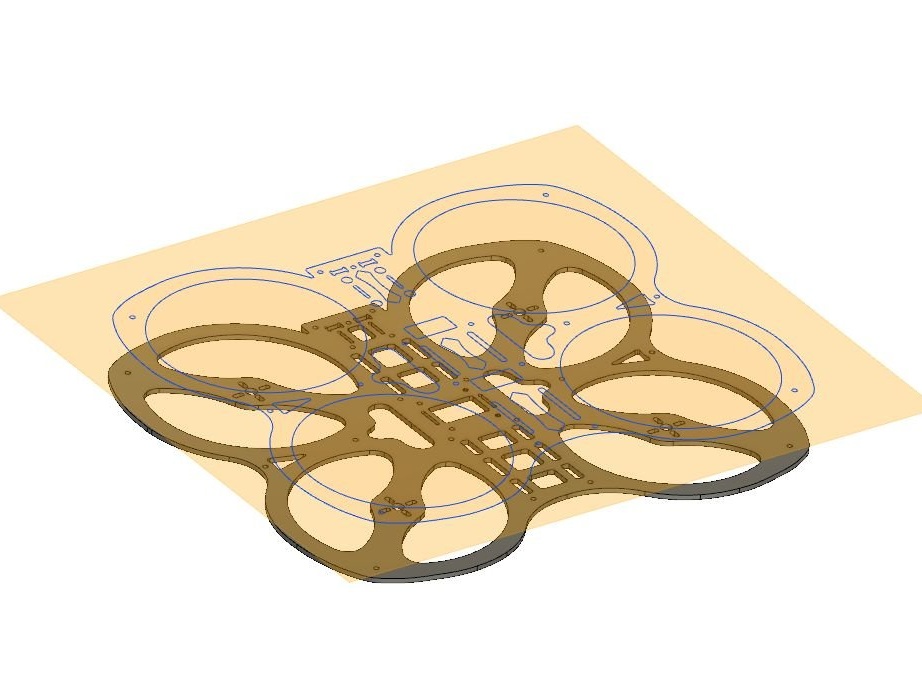
Második lépés: a keret tervezése és összeszerelése
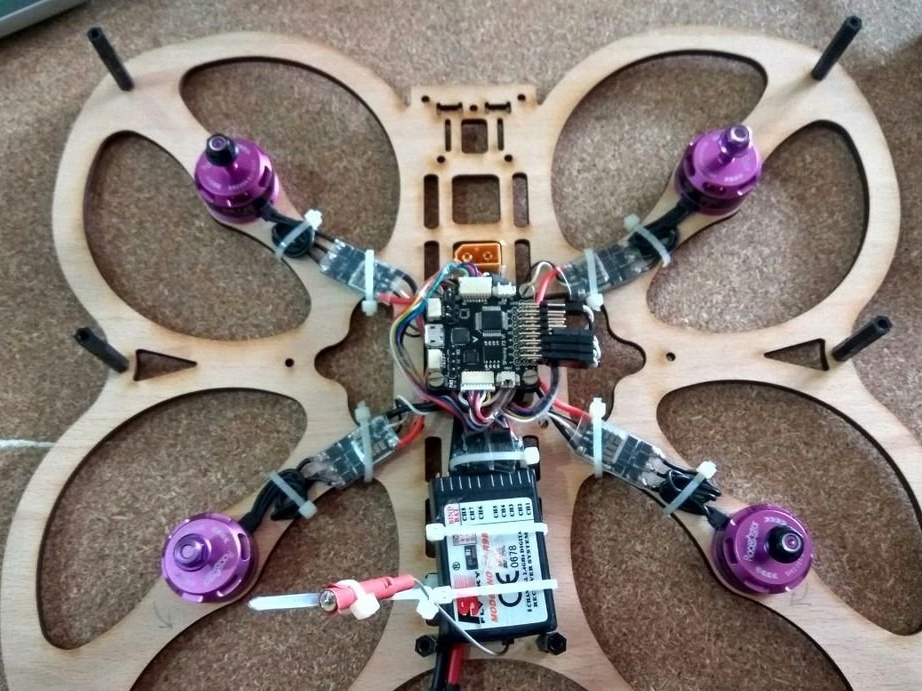
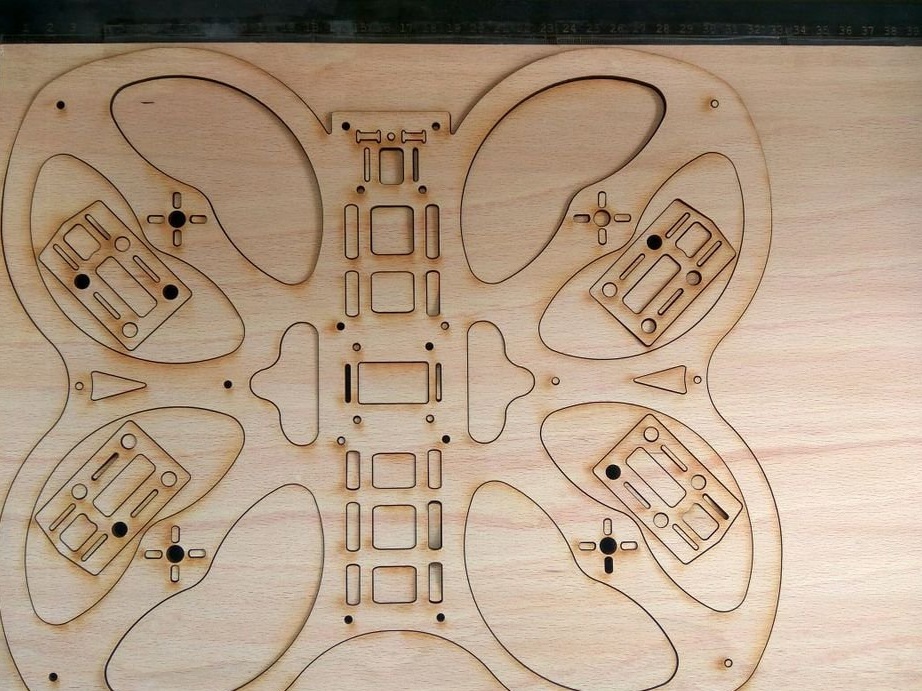
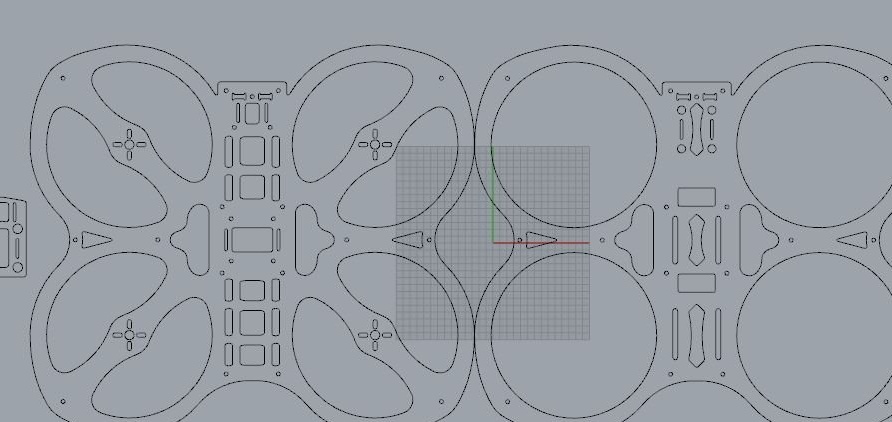
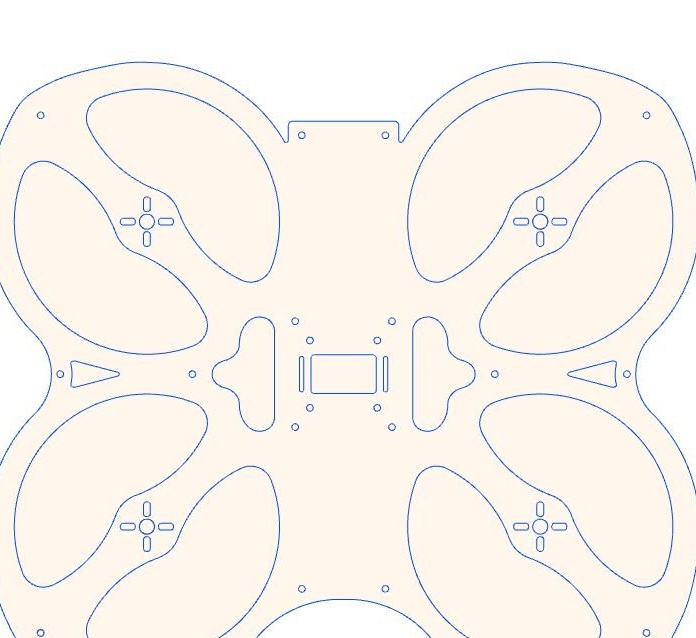
A keret kialakítását az uralkodó pillangó alak ihlette.Ha felülről nézi a keretet, úgy néz ki, mint két szárny.
A varázsló rajzolta a mintát a Fusion 360-ban és a Rhino CAD-ben. A keret mérete körülbelül 230 mm, annak oka az, hogy az egyik motorkeréktől a másikig átlós távolság van. A legnépszerűbb vázméret 210 mm, 250 mm stb. Miután beállította a keret méretét, húzza fel a motortartókat.
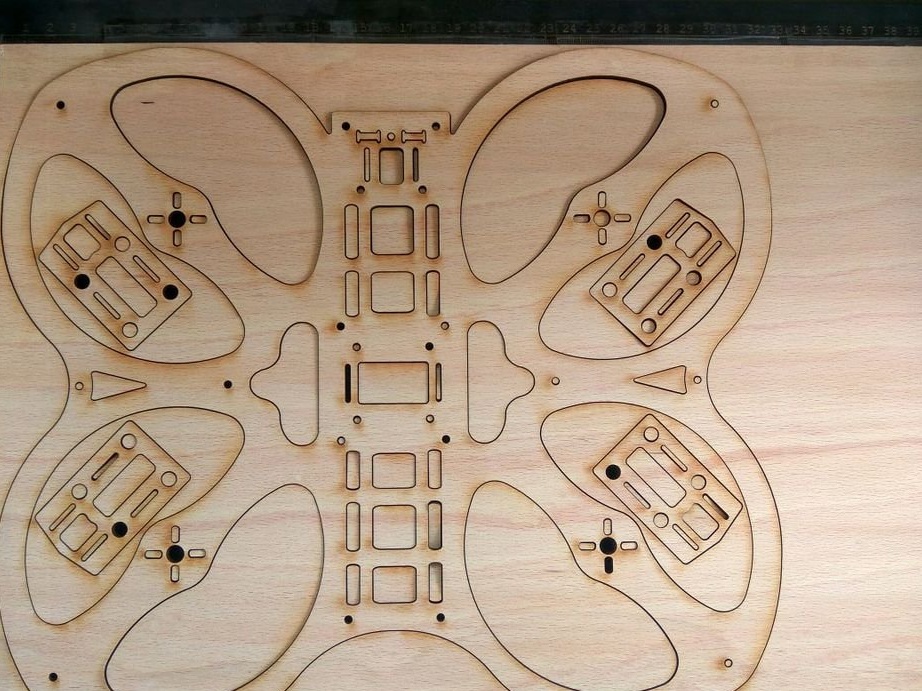
A központi épület az a hely, ahol az összes elektronikát fel kell szerelni, ideértve a repülési irányítót, a vevőt, az akkumulátort stb.
A cikk lézervágással készül. Ha nincs vágó, vághat a műhelyben. A vágási fájl letölthető alább.
File.rar fájl









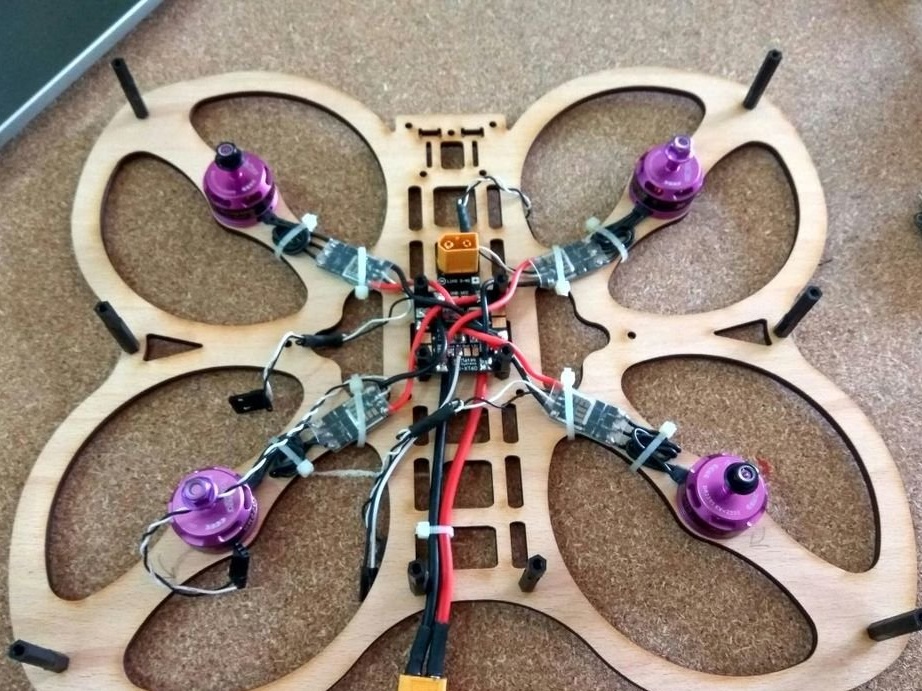
Harmadik lépés: Építsd
Most össze kell szerelnie egy quadrocoptert.
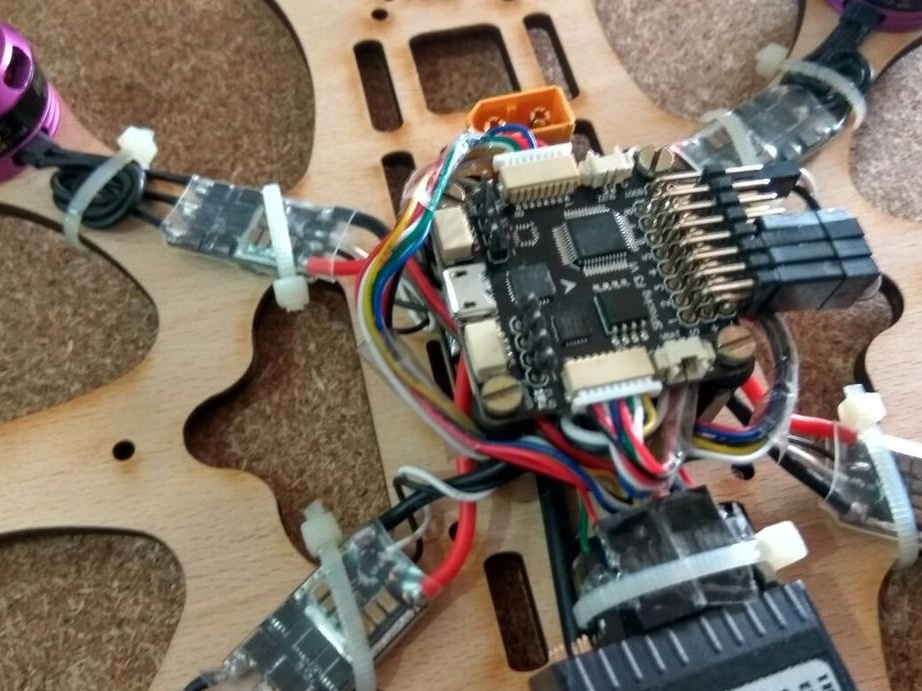
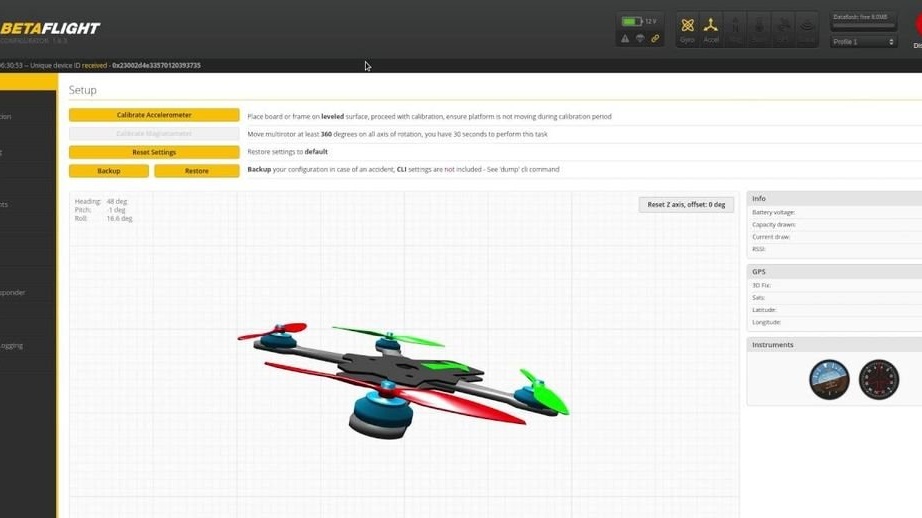
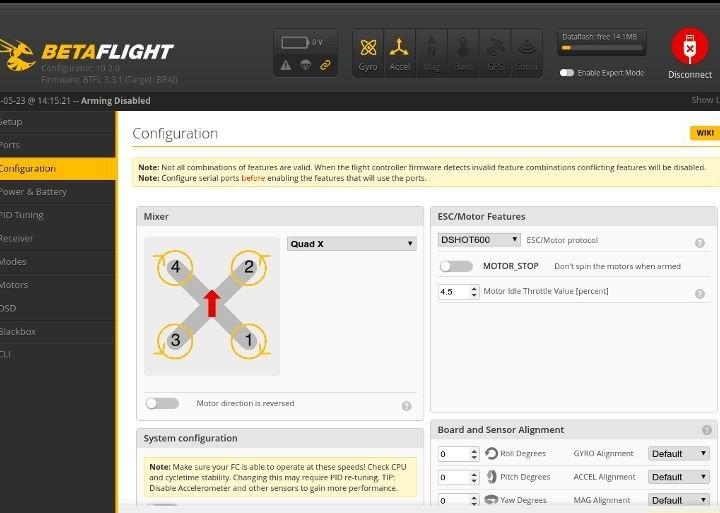
Először meg kell villannia a vezérlőt a Betaflight firmware-ével. Ezután kalibrálja az érzékelőt. Csatlakoztassa a rádió modult és ellenőrizze annak működését. Szerelje fel a motorokat a keretre az X-keret diagramjának megfelelően, a helyes forgásiránnyal. Forrasztjuk meg a motort az ESC csatlakozókhoz és rögzítsük az ESC-t a tartóhoz. Csatlakoztassa az áramelosztó kártyát és forrasztja az ESC párnákat. Csatlakoztassa a Soler XT60-at a tápkábelre, majd az áramelosztó kártyára. Rögzítse a vezérlőt. Csatlakoztassa az ESC vezetékeit a repülési irányítóhoz. Szerelje fel a vevőt a keretre. Helyezze fel a felső fedelet.