
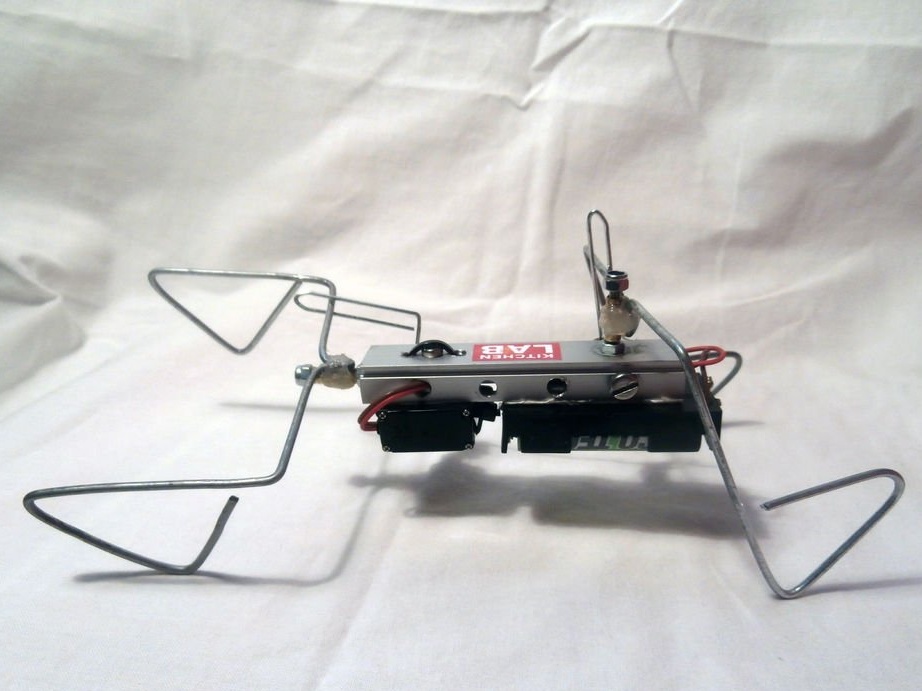
Helló mindenkinek! Arra inspiráltam, hogy készítsem a BEAM-robotomat, miután eleget láttam az ilyen egymotoros és ikermotoros robotok csodáit az interneten. Az ötlet egy sétáló robot létrehozása volt, amely ugyanúgy lép fel, mint az egy- vagy kétmotoros BEAM járók. Több sikertelen kísérlet után megtettem azt, amit akartam!
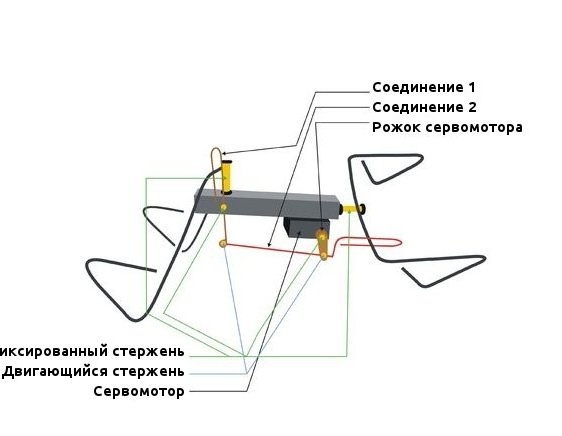
1. lépés: A mechanizmus
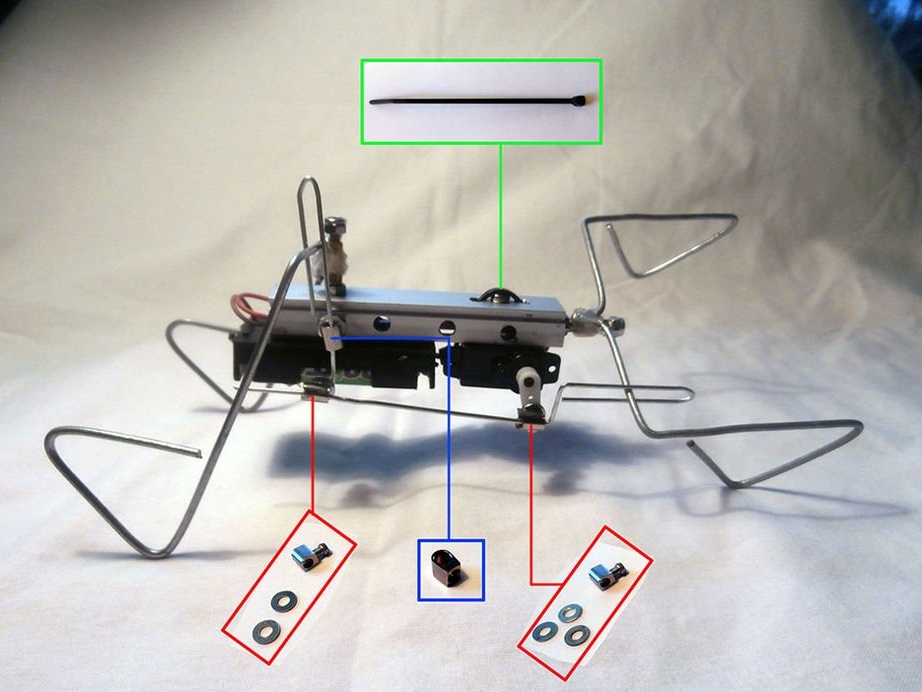
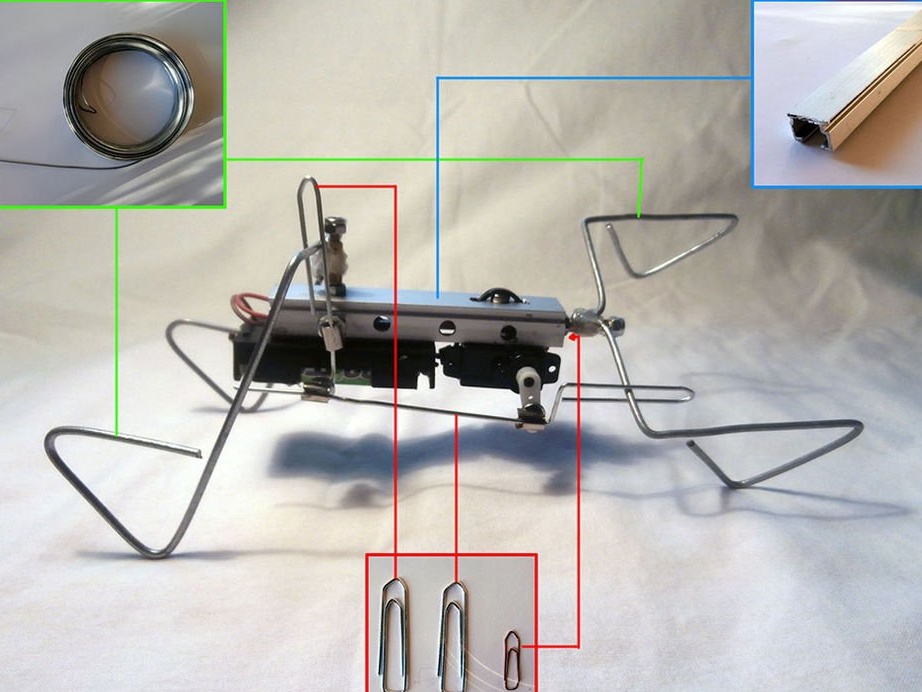
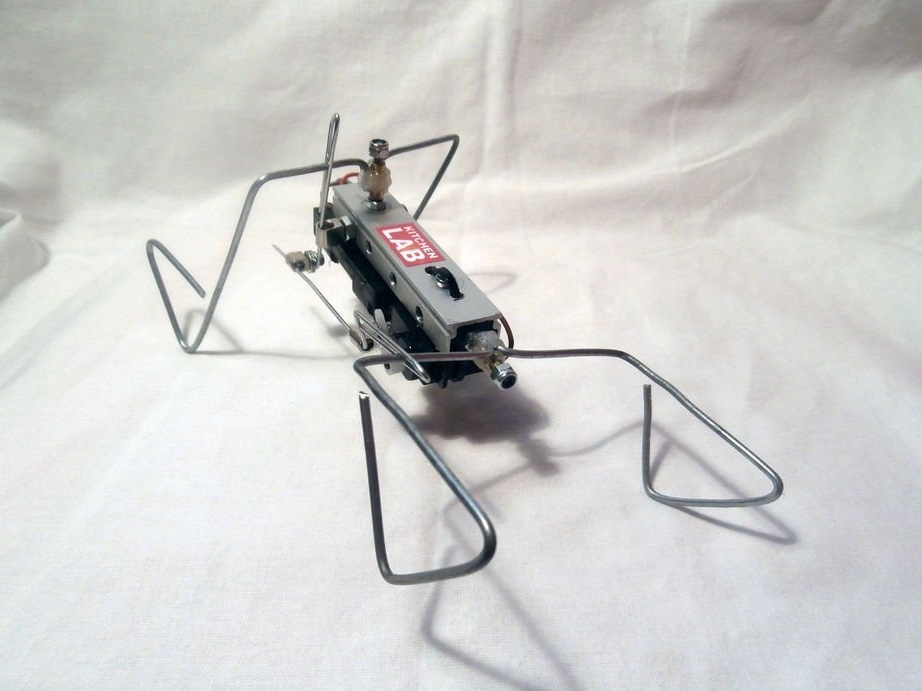
2. lépés: Szükséges alkatrészek

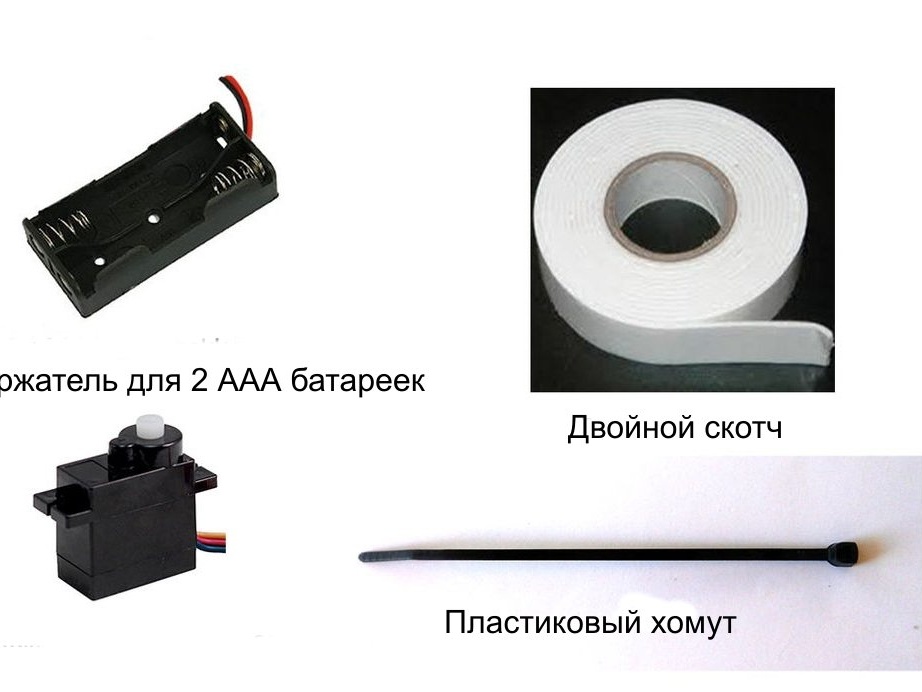



(1x) folyamatos forgatású szervo
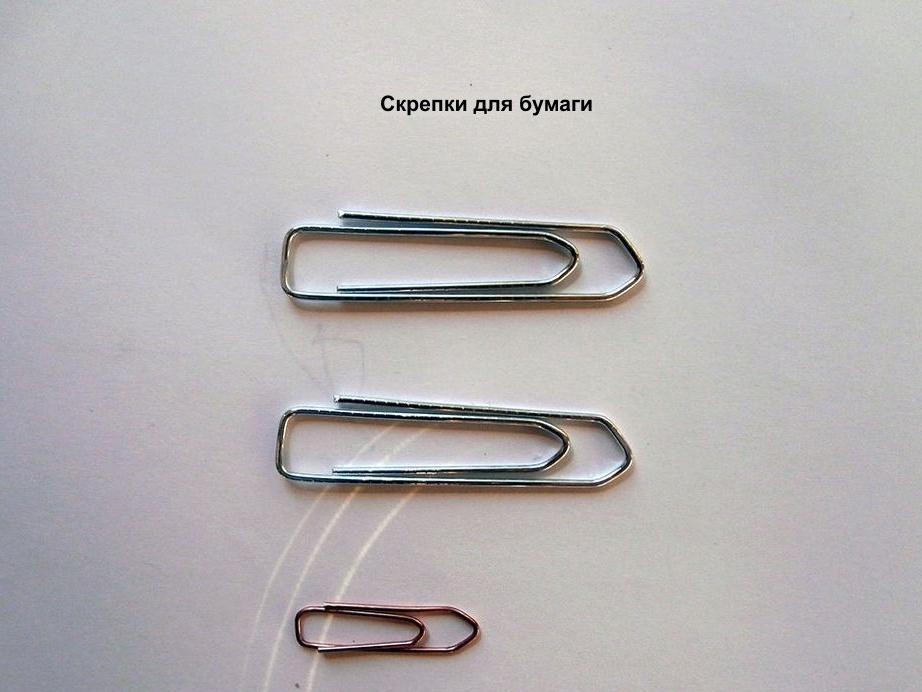
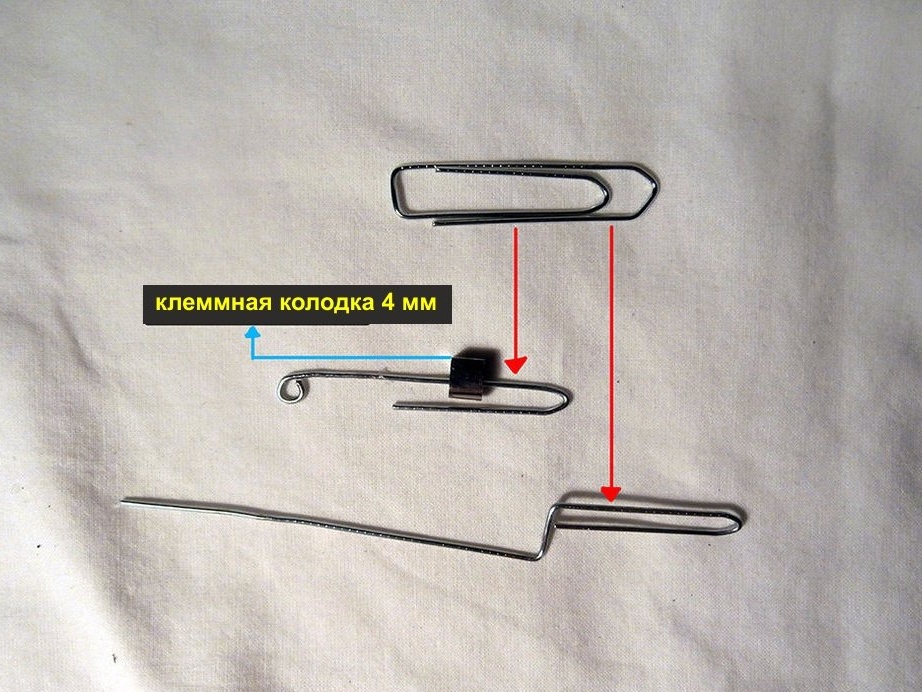
(2x) nagy gemkapcsok
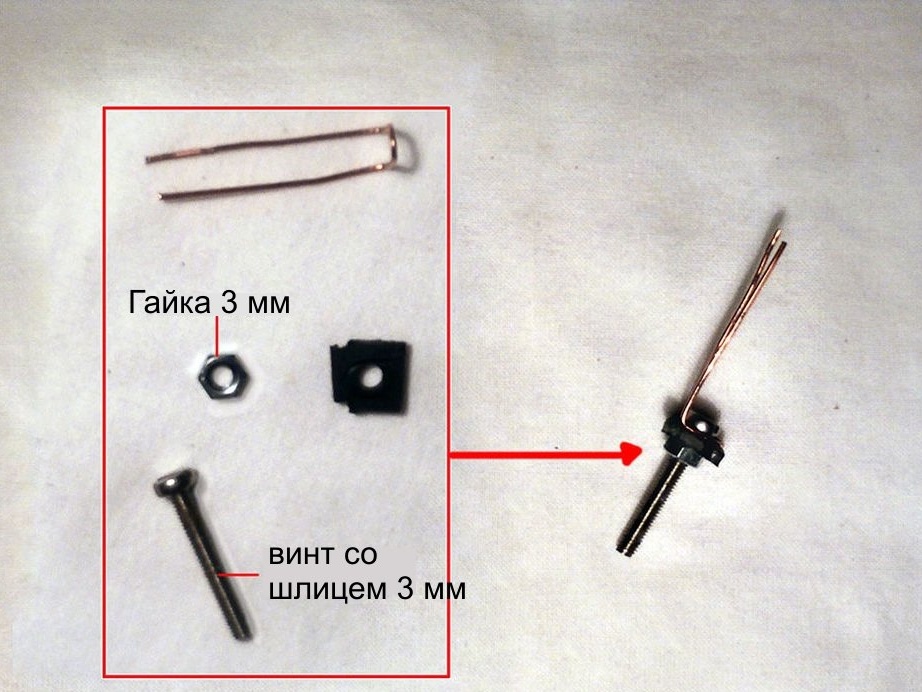
(1x) kis gemkapocs
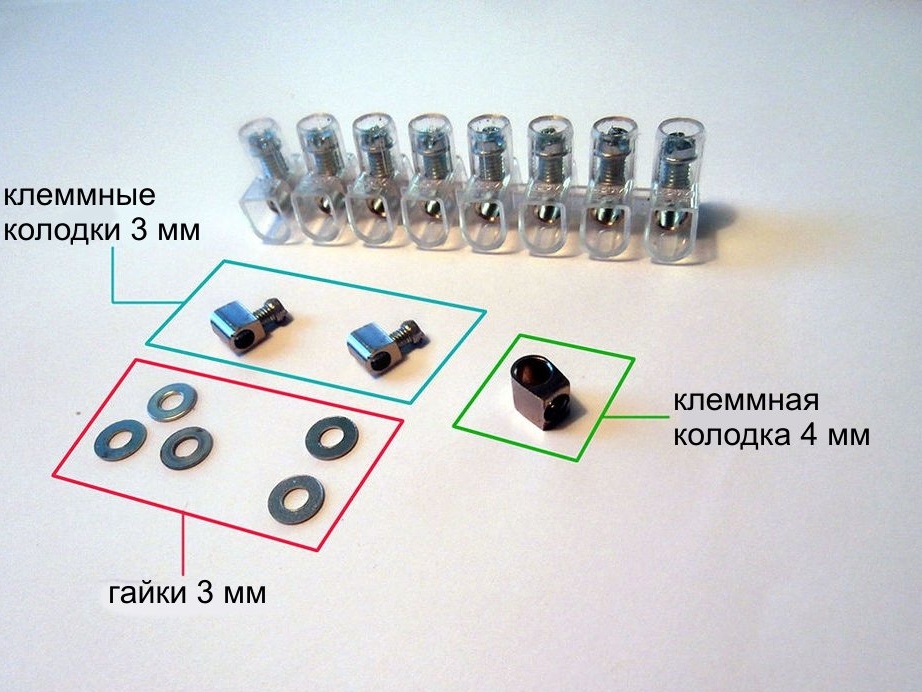
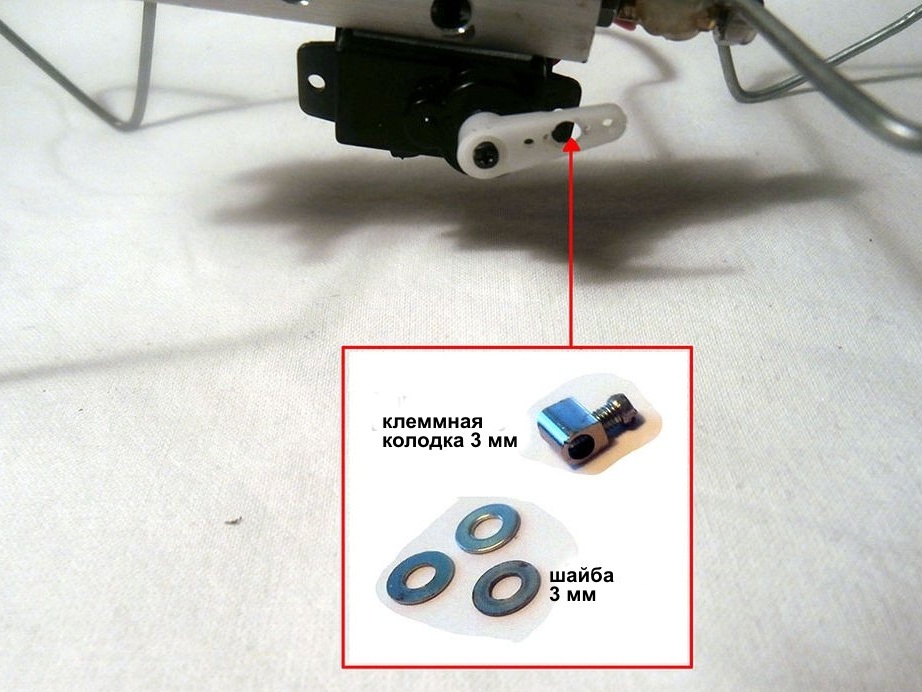
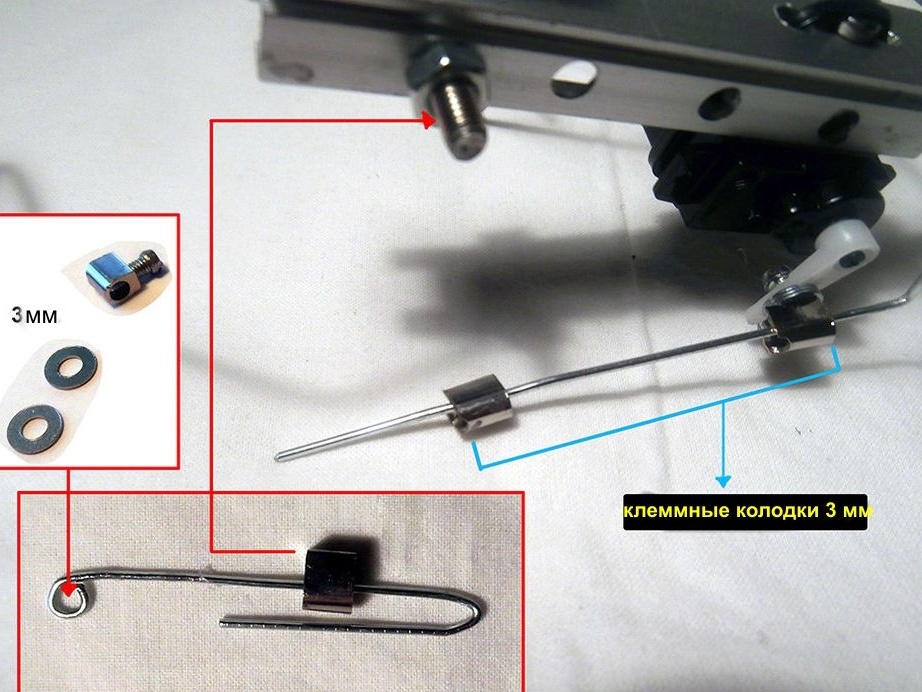
(2x) sorkapcsok (3mm)
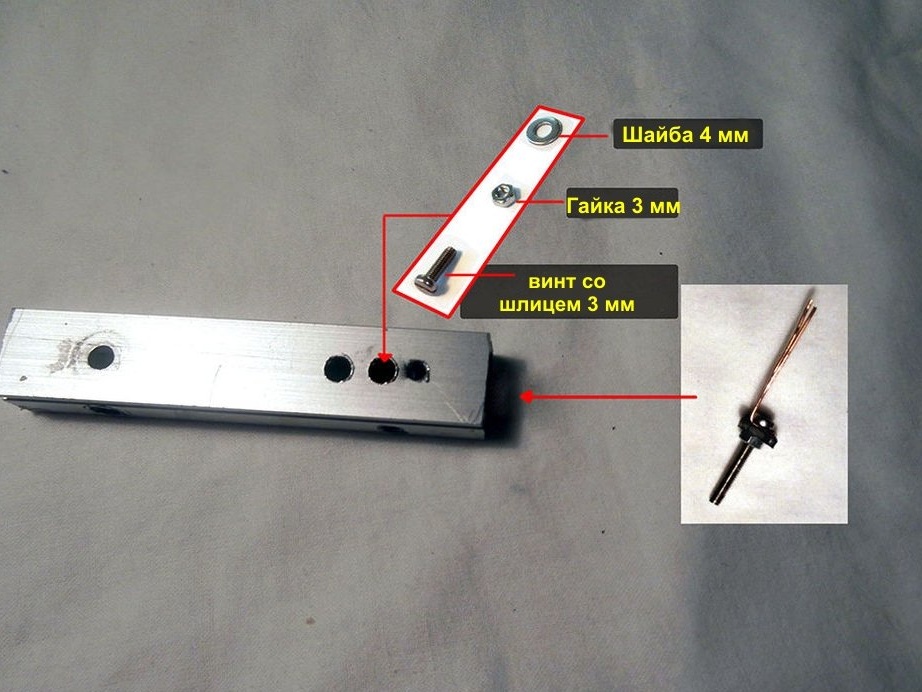
(1x) sorkapcsok (4mm)
(1X) Használt alumínium profilblokk
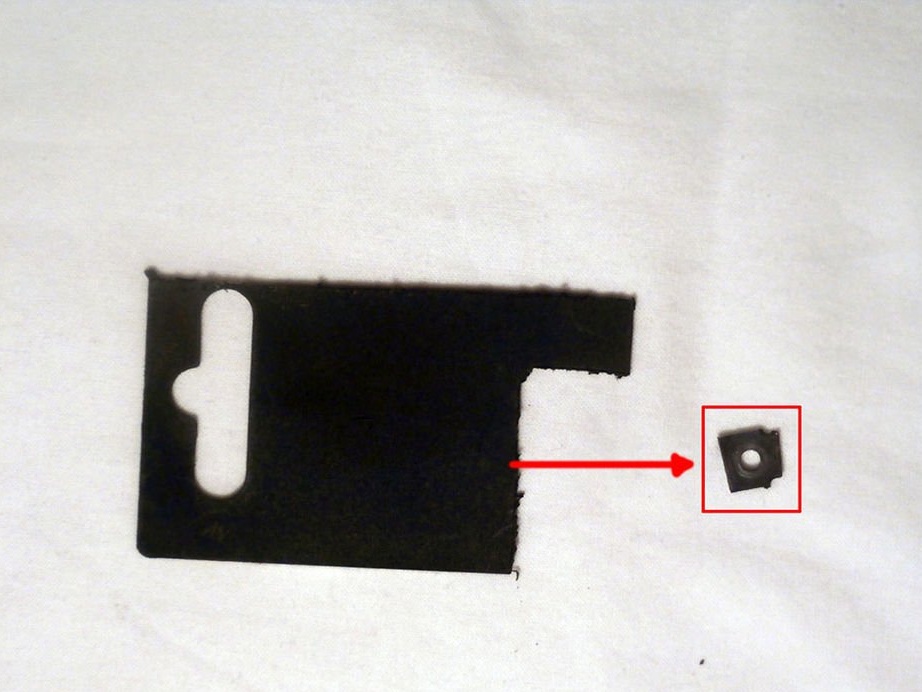
(1X) műanyag darab
Acélhuzal (2 mm)
Dupla ragasztószalag
Sárgaréz cső
(1X) kis bilincs
(1X) akkumulátor (2 x AAA)
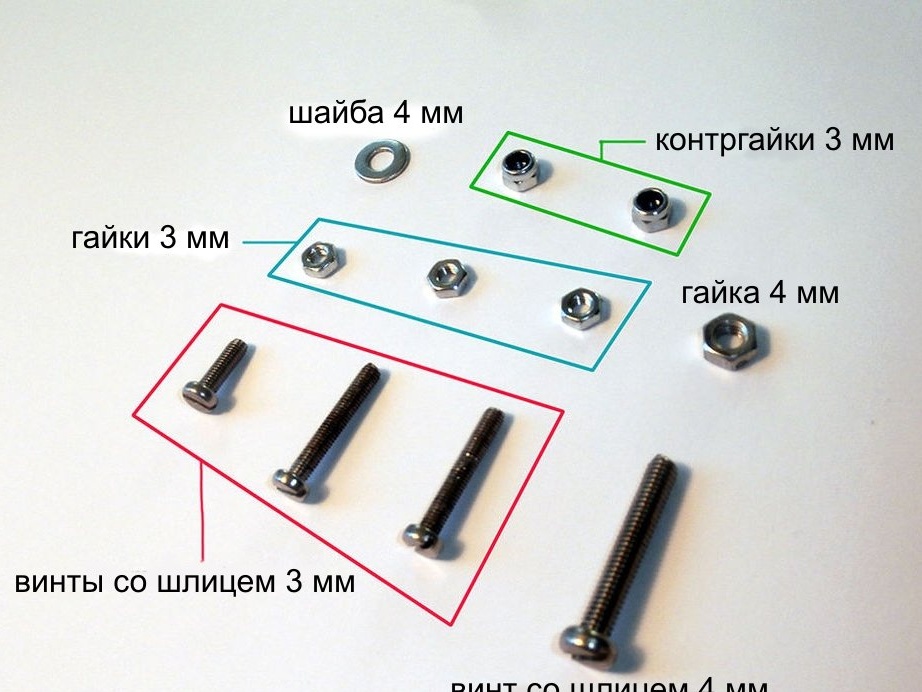
(2X) ellenanyák (3 mm)
(3X) anyák és csavarok (3 mm)
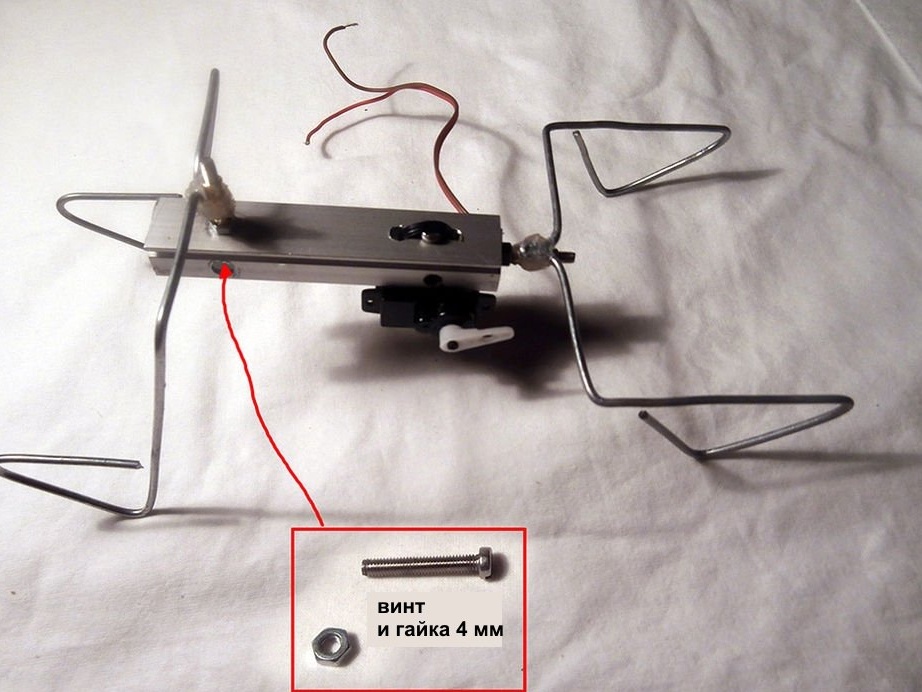
(1x) anyák és csavarok (4 mm)
(5x) alátét (3mm)
(1X) alátét (4mm)
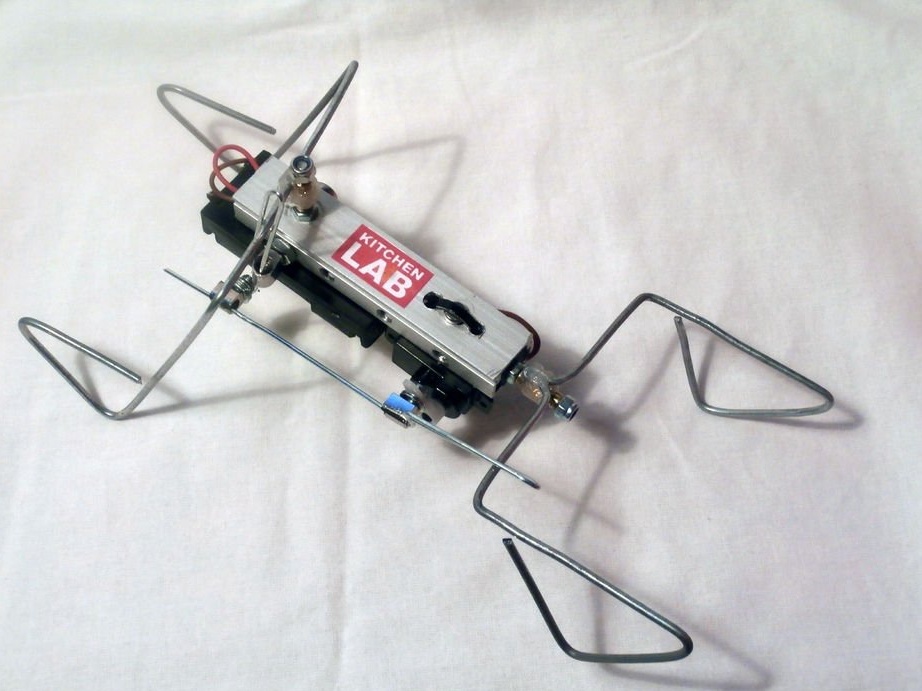
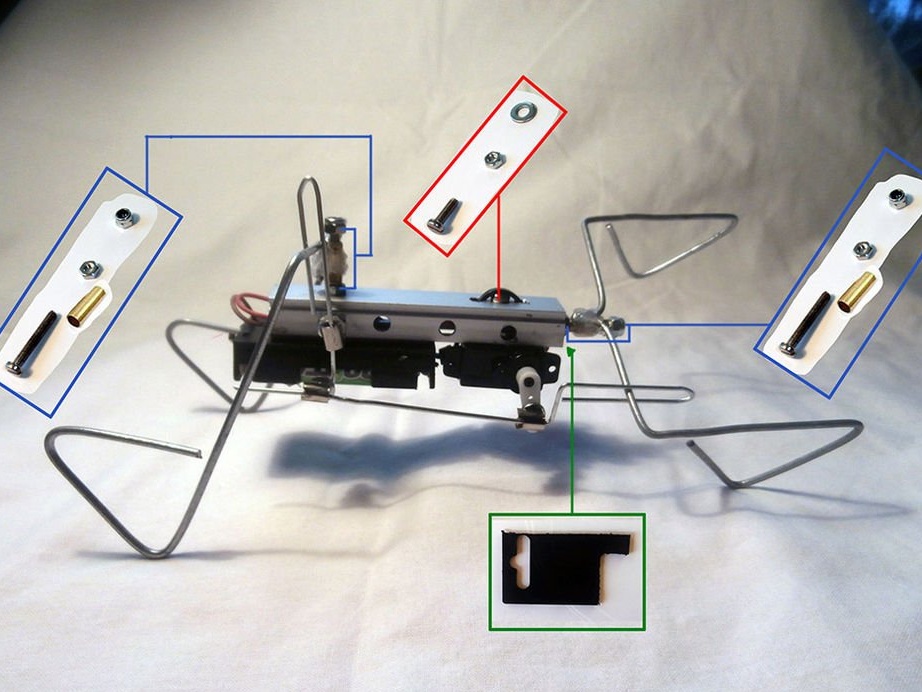
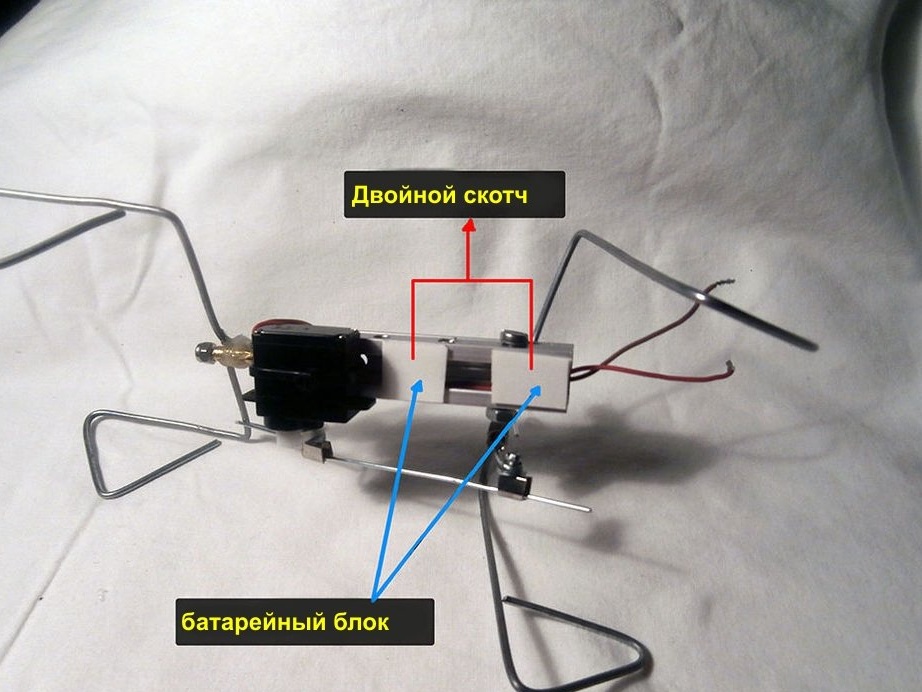
3. lépés: Alkatrészek összeszerelése
4. lépés: Eszközök
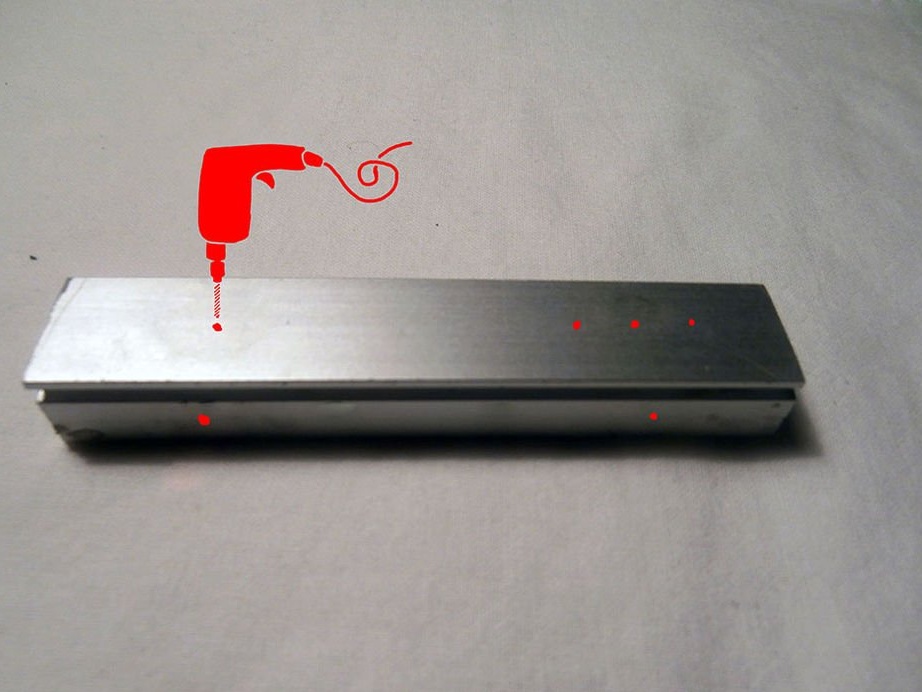
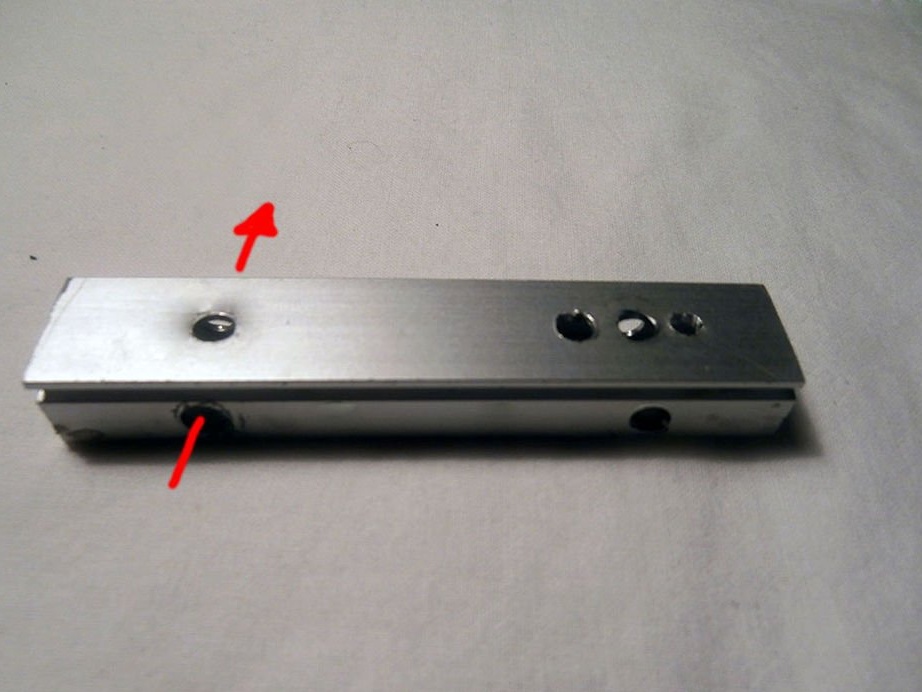
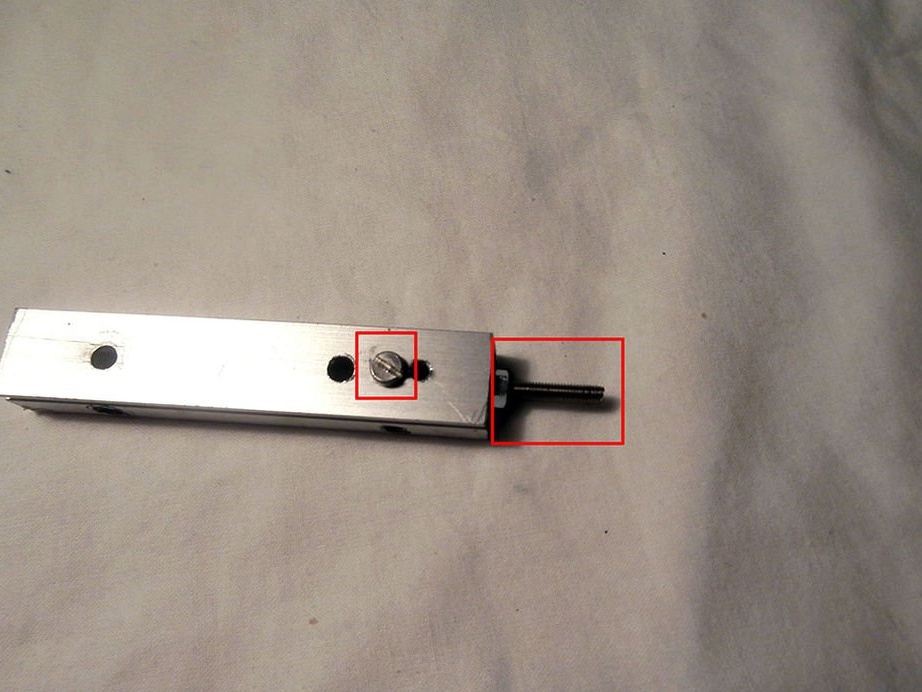
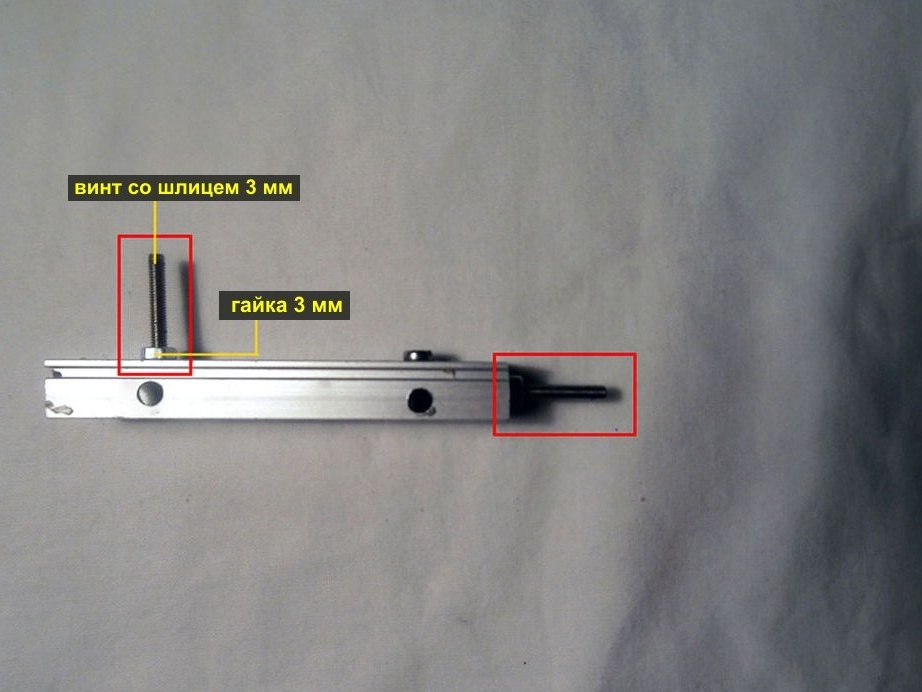
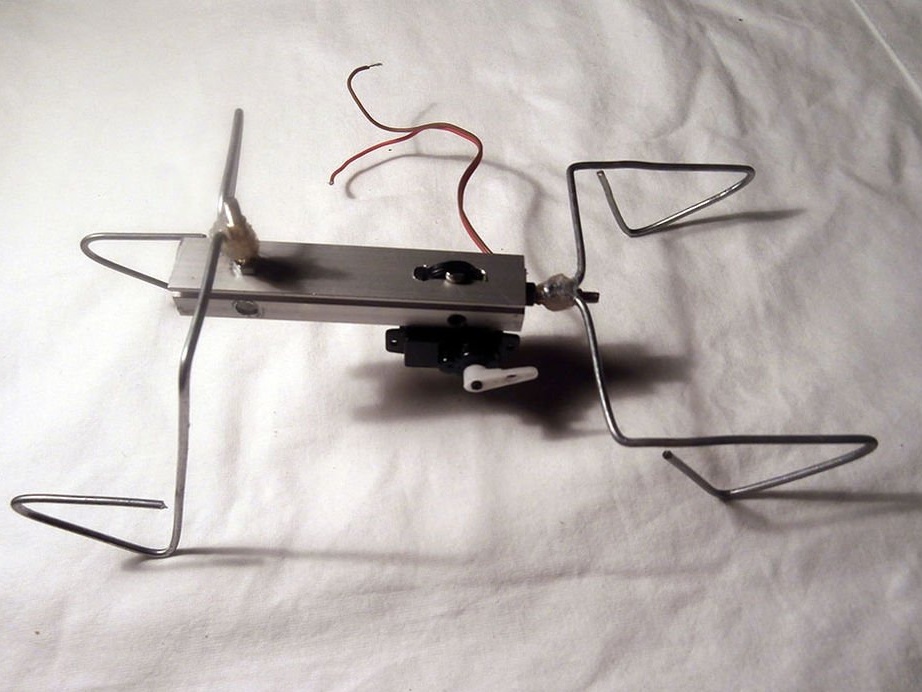
5. lépés: Lakás

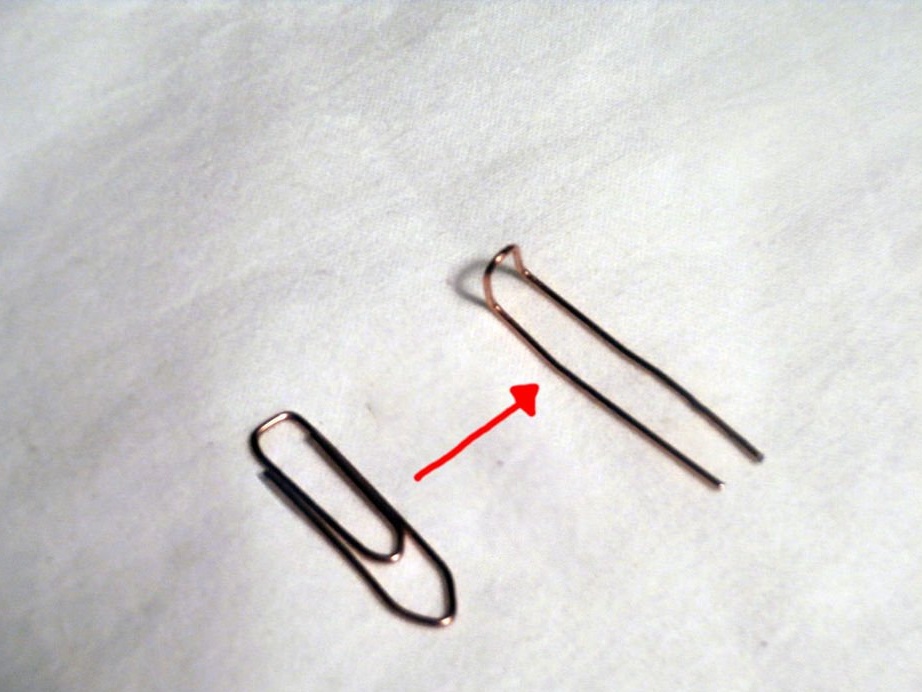

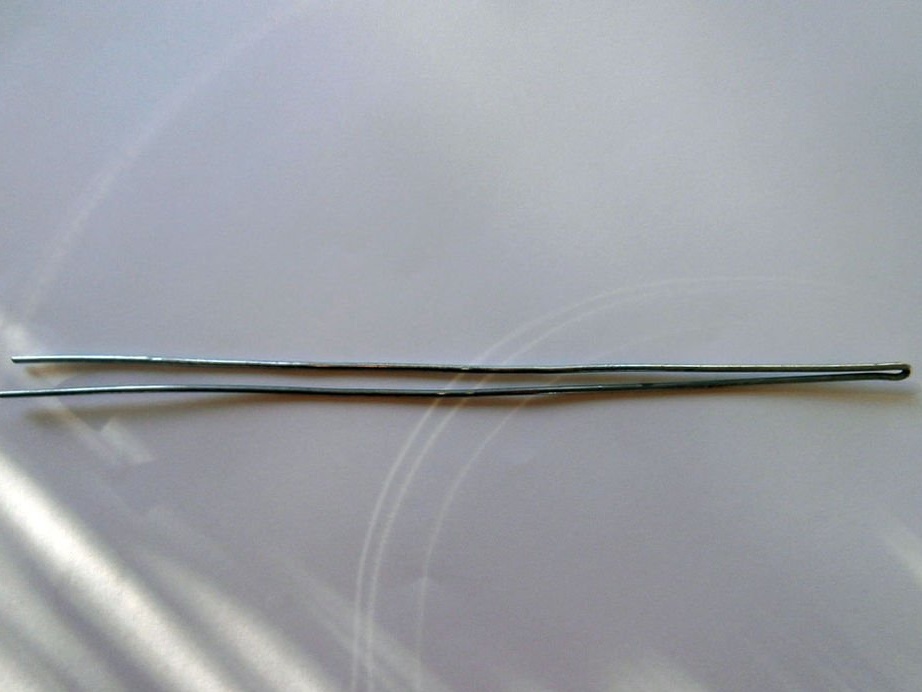
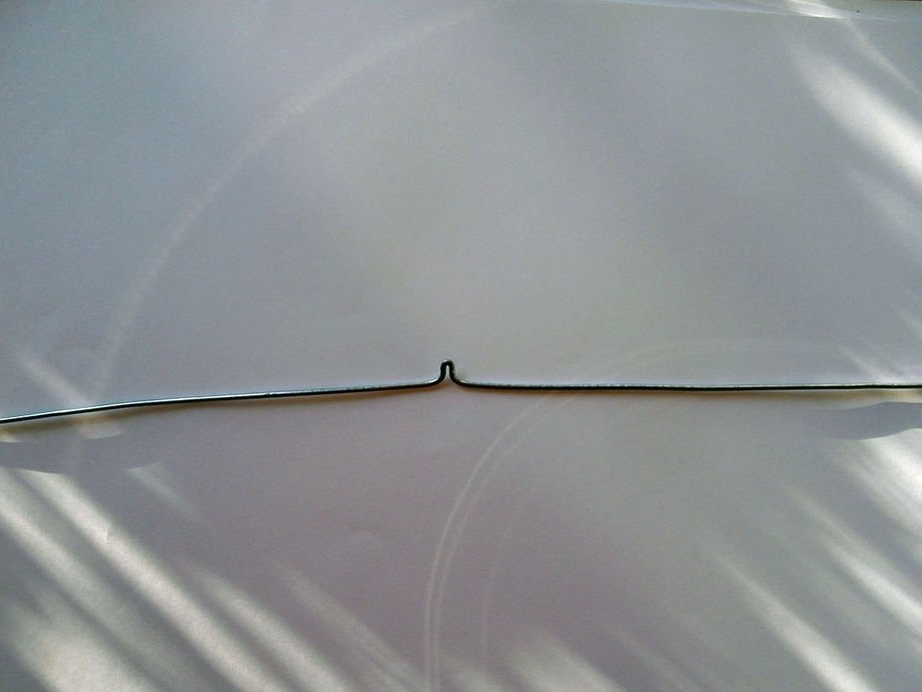
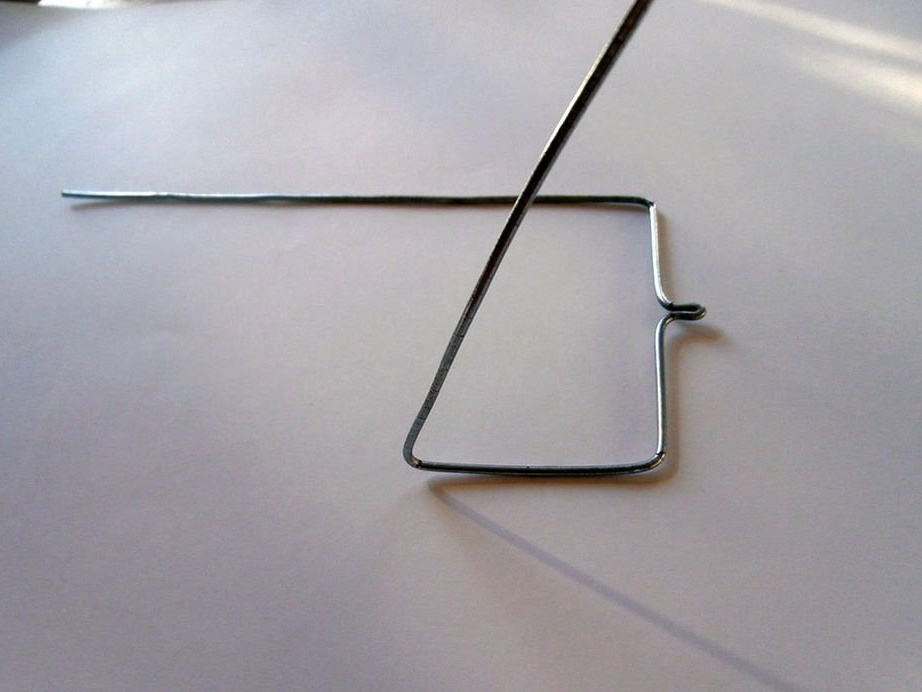
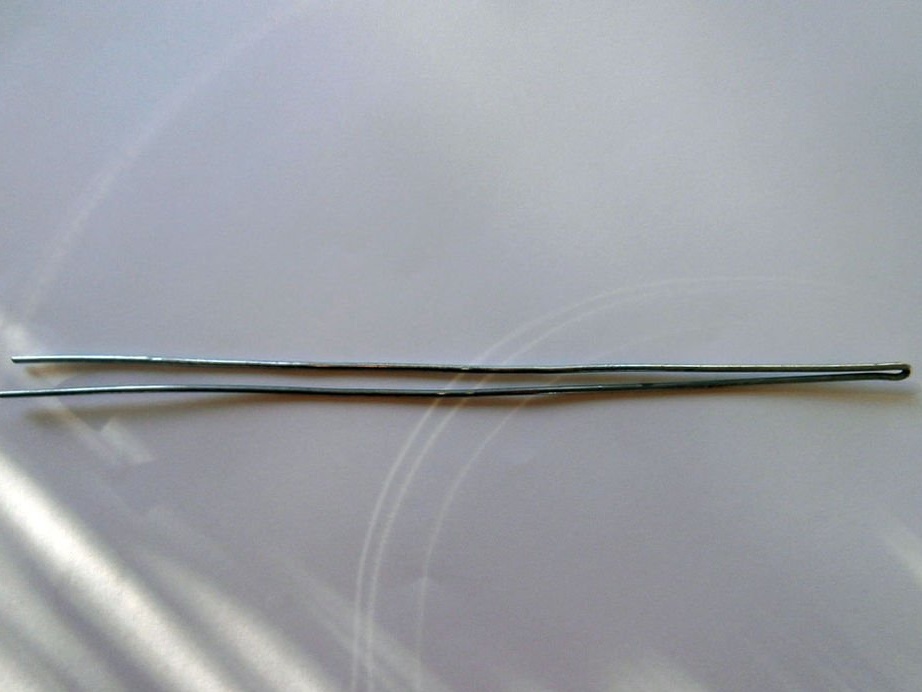
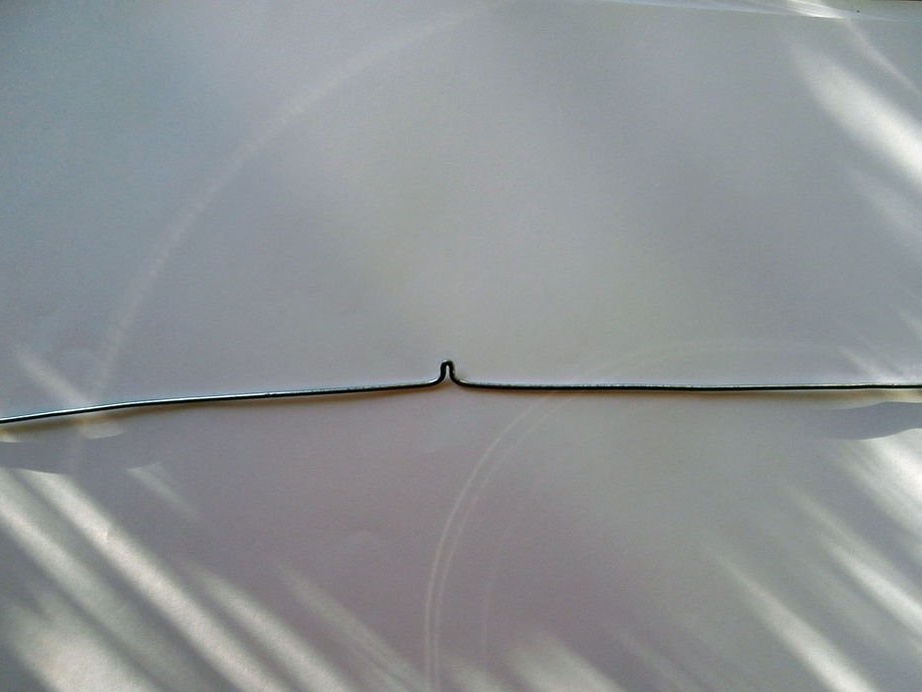
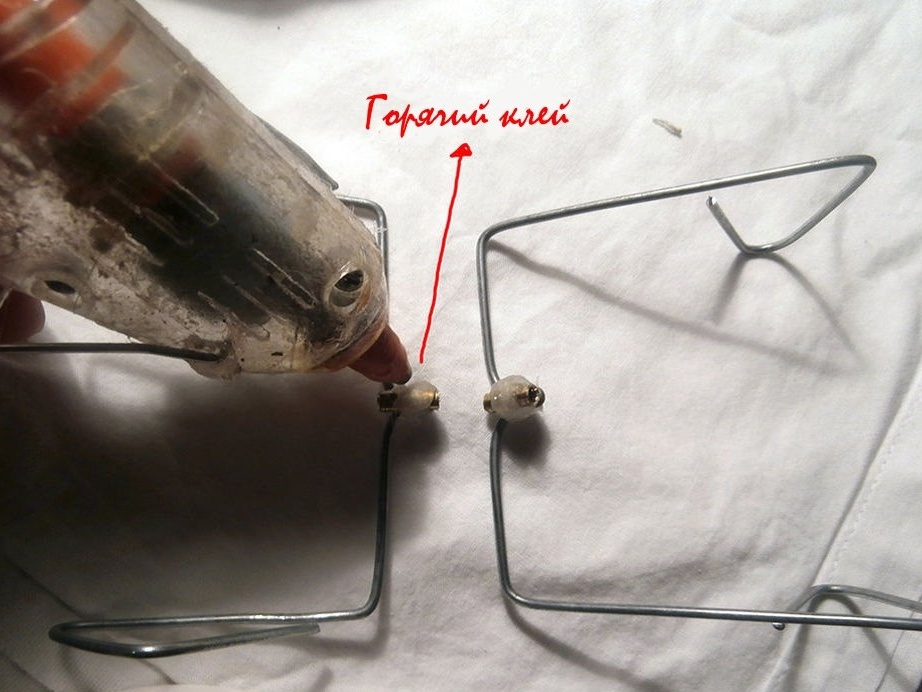
6. lépés: első lábak
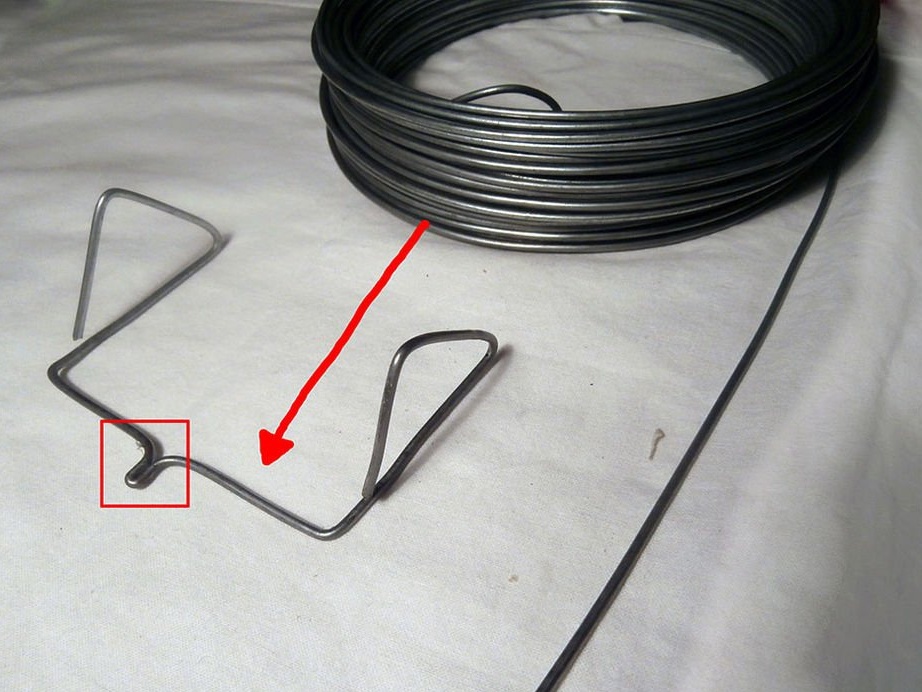
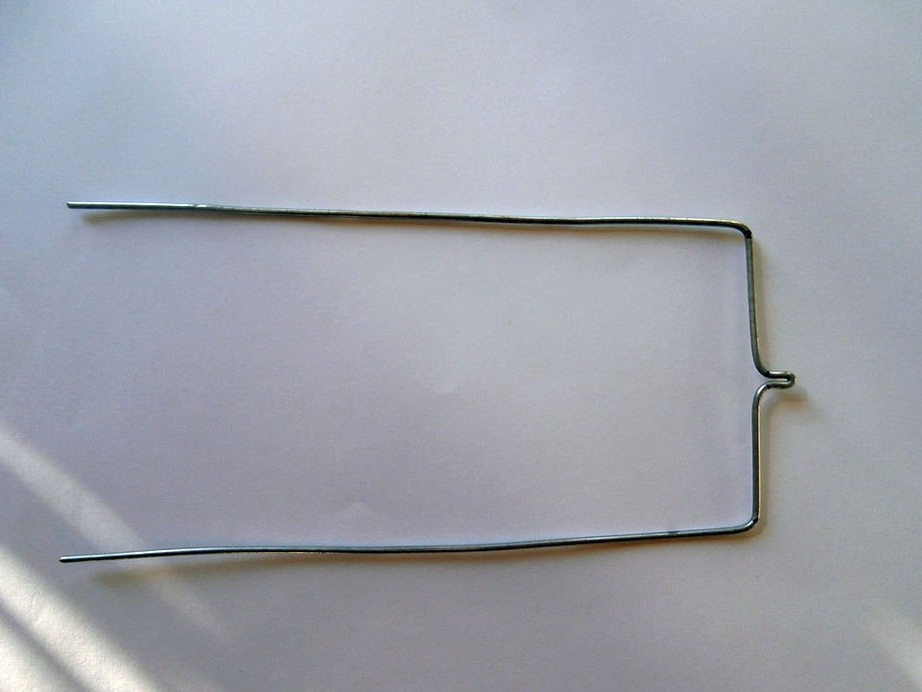
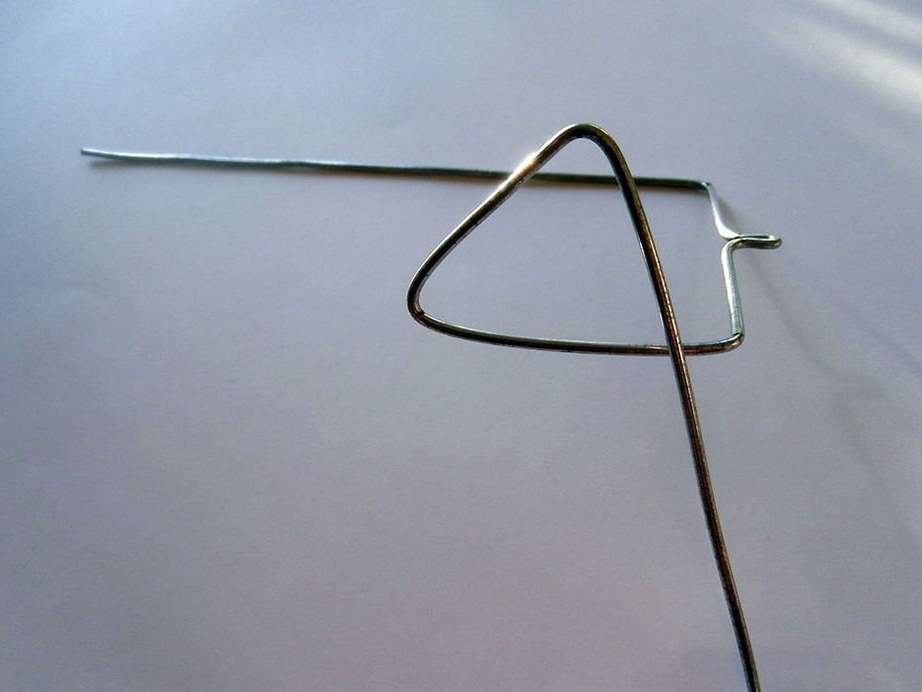
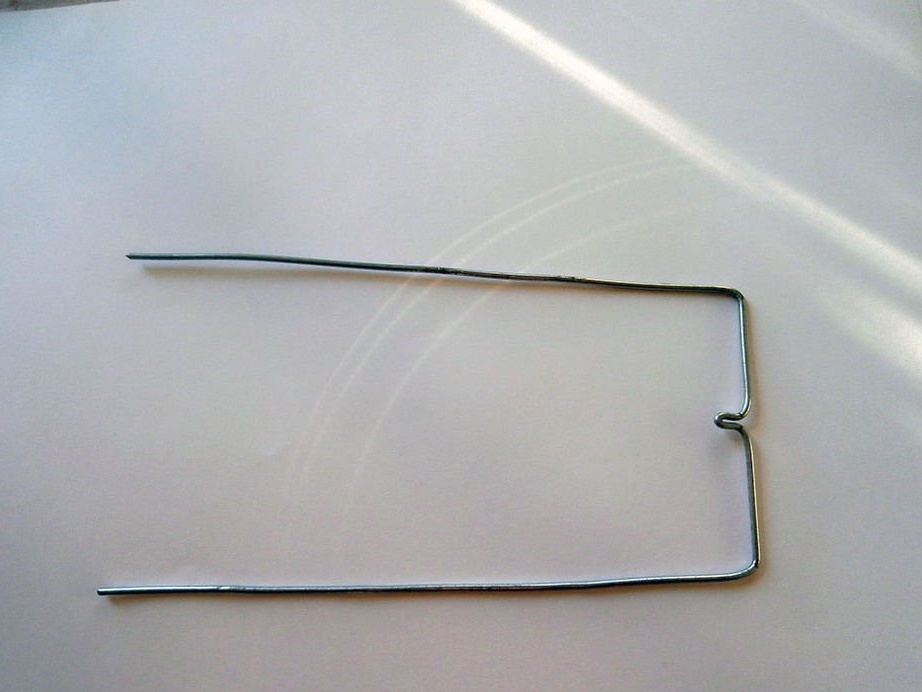
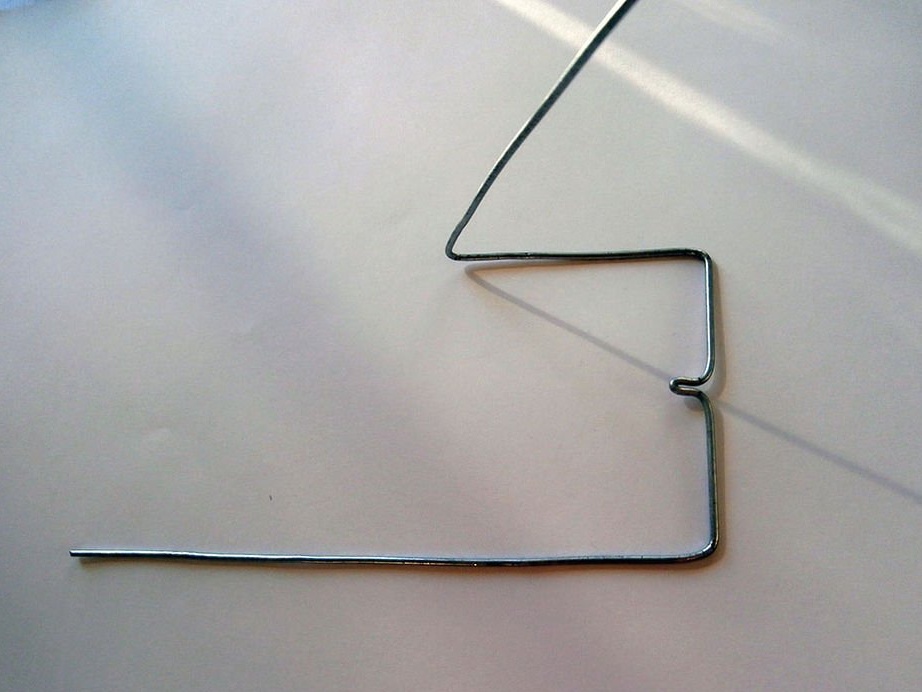
7. lépés: Hátsó lábak
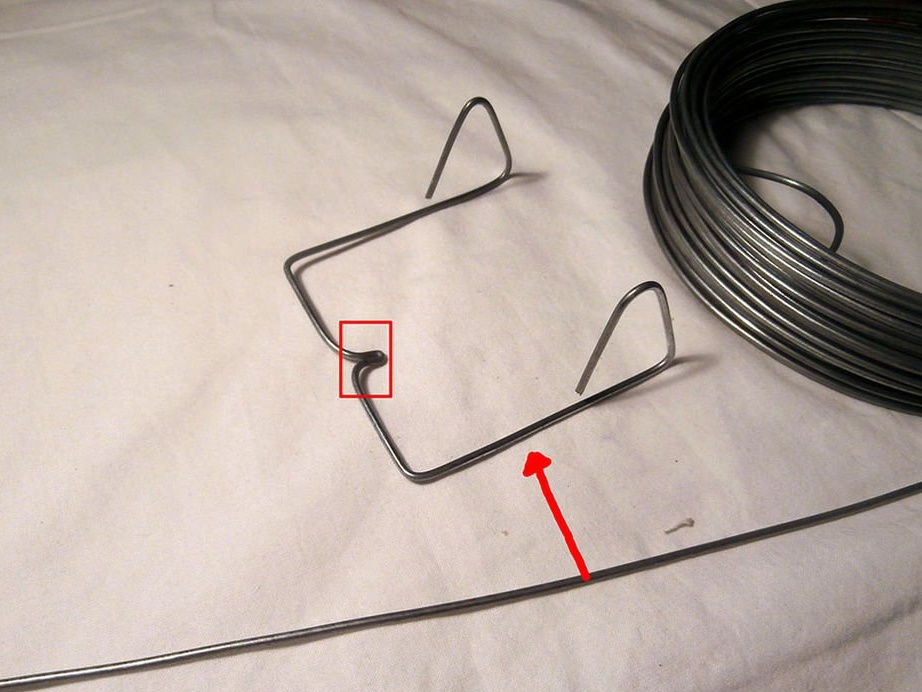
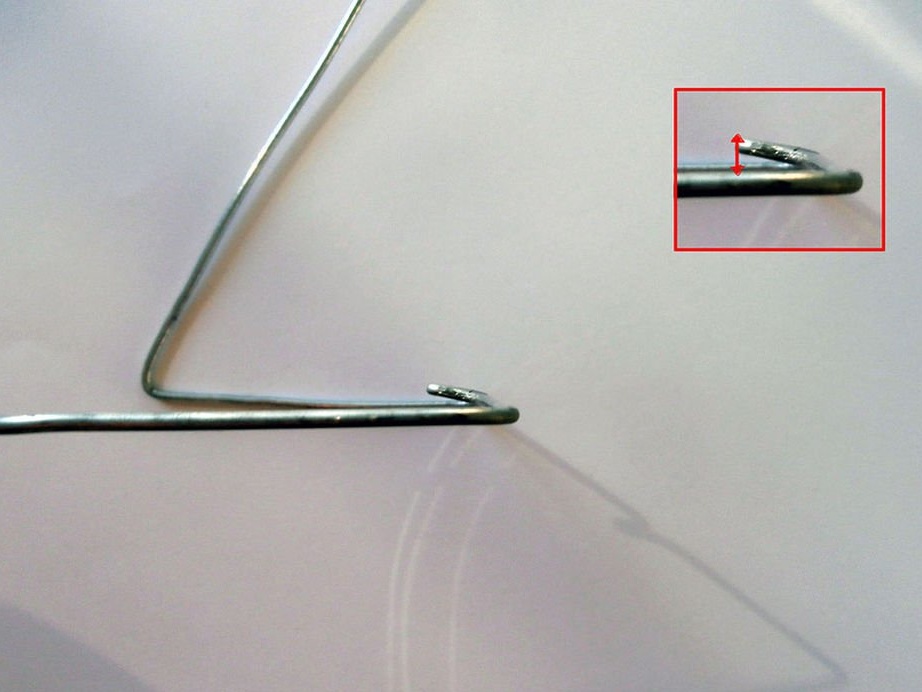
8. lépés: A lábak rögzítése
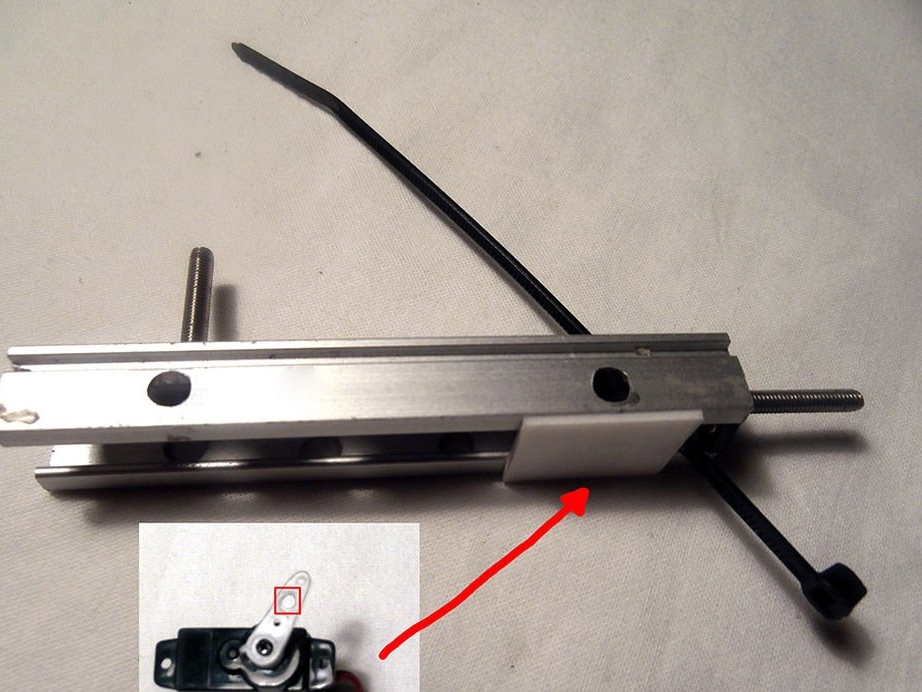
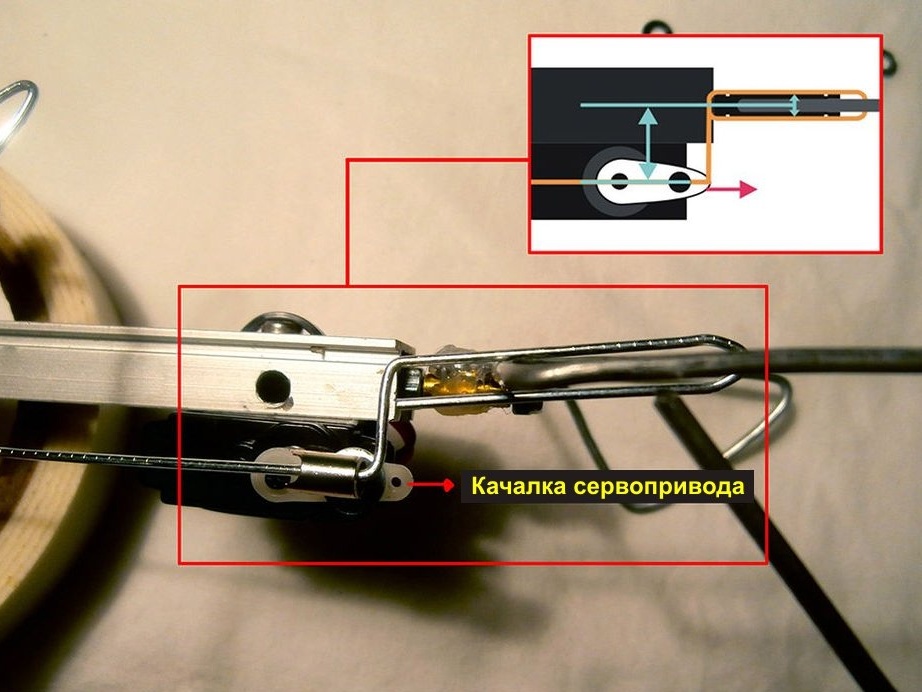
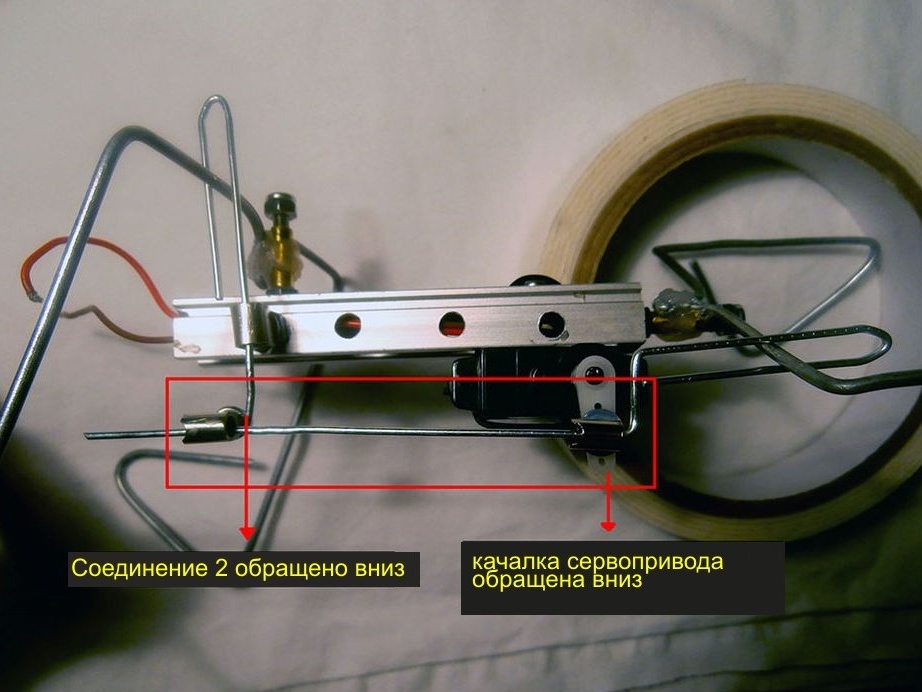
9. lépés: Tengelykapcsoló
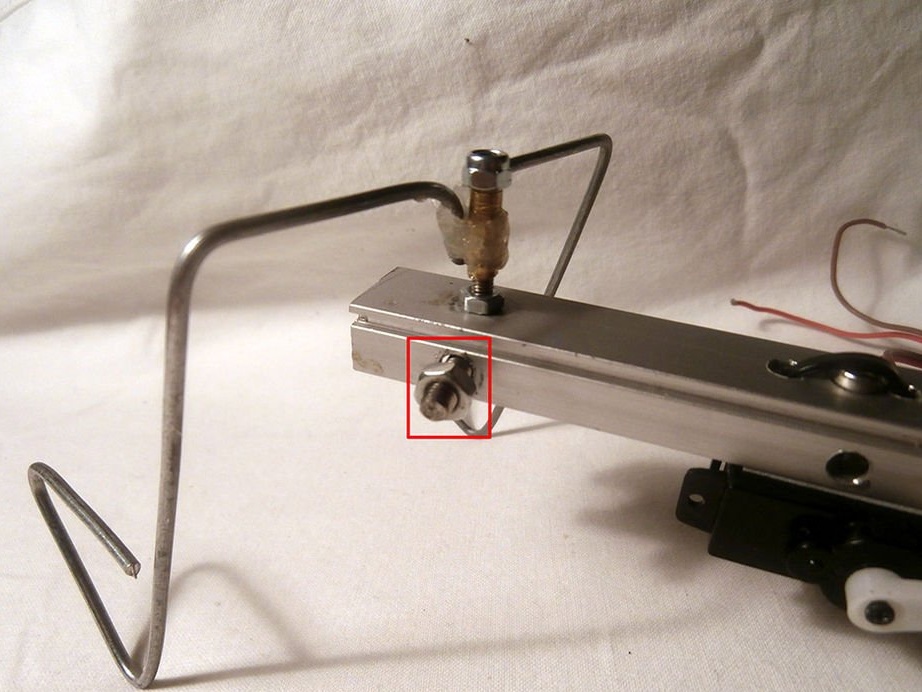
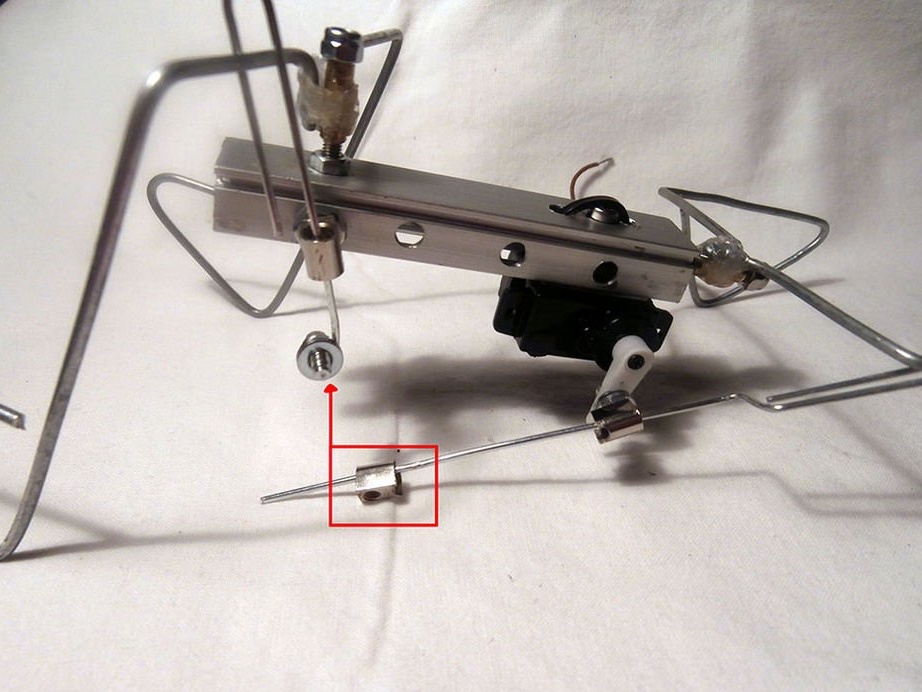
10. lépés: Tengelykapcsoló-rögzítés
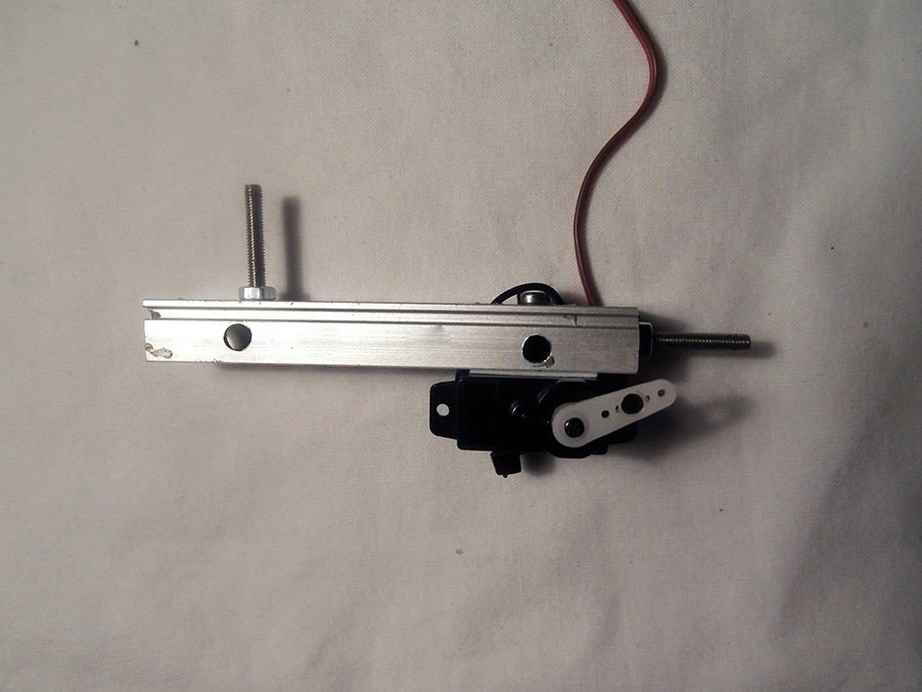
11. lépés: az utolsó érinti
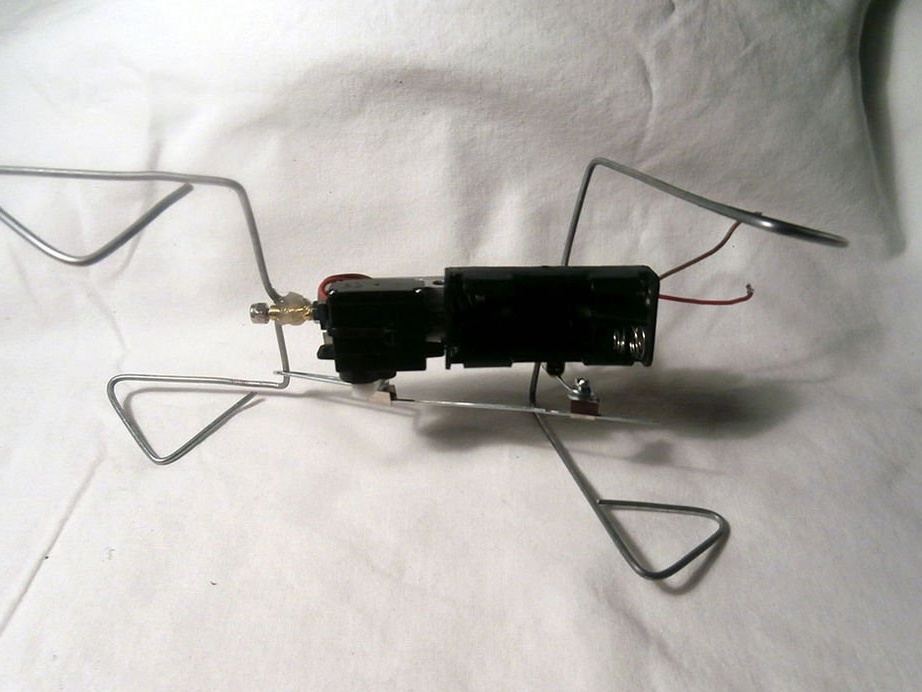
A végén egyszerűen huzalozza a szervót és az elemeket, és a robot A bagoly utazást indít otthonában :)