

A vibrobotok ilyenek robotokamelyek rezgések miatt mozognak. Annak ellenére, hogy tervezésük meglehetősen egyszerű, munkájuk során nem kevésbé lenyűgöző, mint műszakilag kifinomultabb testvéreik. Egy ilyen robot sörtékkel fog mozgatni, ez egyfajta a lába.
A cikkben ismertetett robot önállóan megváltoztathatja a mozgás pályáját, és önmagában körülkerüli az akadályokat. Kísérletként a szerző két robotot készített, amelyekre különféle energiaforrásokat és motorokat telepítettek. Alapvetően nincs szigorú szabvány a felhasznált anyagokra vonatkozóan, a lényeg az, hogy a robot összeszerelésekor betartsa az adott sémát.

Anyagok és eszközök a gyártáshoz:
- 3x150 mm méretű nylon kötés;
- fekete színű szigetelő szalag;
- 9 voltos akkumulátor (6F22);
- lézerlemez (CD vagy DVD nincs különbség);
- védő burkolat;
- 9 voltos akkumulátor csatlakozó;
- excentrikus (törlés).

A robot gyártási folyamata:
Első lépés. Hozza létre a robot alapját
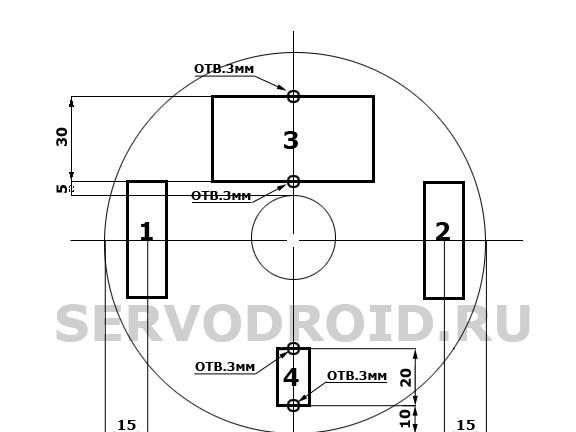
A robot alapjául egy szokásos CD vagy DVD lemezt kell használni. Végezzen lyukakat rajta egyértelműen a képen látható séma szerint. Kivétel nélkül minden lyukat 3 mm-es fúróval fúrnak. Ez az átmérő elég, ha nejlonkötések rögzítésére használják. Ha úgy dönt, hogy más rögzítési módszert használ, akkor a lyukakat bármilyen más méretre fúrhatja. A javasolt rajz alkalmas a robot összeszerelésére.
Az 1. és 2. szám jelöli a kefék telepítési helyét, a 3-as számú négyzetbe egy akkumulátor van beszerelve, a 4-es négyzetbe pedig egy motor van felszerelve.
Második lépés Készítünk és telepítünk mozgatókat
A meghajtásnak köszönhetően a robot mozog. Ezek elkészítéséhez két fogkefét kell vennie. A legjobb, ha a kefék sörtemagassággal és alakkal azonosak. Ha az alak más, akkor ollóval javíthatja.
Most a sörtéknek meg kell határozniuk az irányt. Ehhez ragasztószalagot vesznek, és a sörtéket a fényképnek megfelelően ugyanúgy csomagolják. Ebben a helyzetben a kefét körülbelül egy órán keresztül kell tartani, hogy a sörték emlékezzenek erre a helyzetre. A képen a szürke nyíl jelzi a sörték dőlésének irányát.

A kívánt alak beállítása után el kell vágnia a fogkefével a sörtékkel ellátott részt. Ezután el kell vennie a ragasztópisztolyt, és a sörtéket a lemezen a meghatározott helyekre kell telepíteni. Minden munkát gyorsan és pontosan kell elvégezni, mivel a forró ragasztó gyorsan lehűl és megszilárdul.Meg kell próbálnia telepíteni a keféket úgy, hogy egymással párhuzamosan álljanak.
A kefék sörtéinek vissza kell mutatni, vagyis az akkumulátor felé kell lenniük 9 voltos feszültségnél. Működés közben a robot a sörték irányával fog mozogni, vagyis az akkumulátor helye a robot hátulja lesz.

1 - tárcsa, 2 - melegen olvadó ragasztó, 3 - lyukak a motor beszereléséhez, 4 - lyukak az akkumulátor beszereléséhez. Fehér nyilak jelzik a sörték irányát.
Harmadik lépés Excentrikus készítés
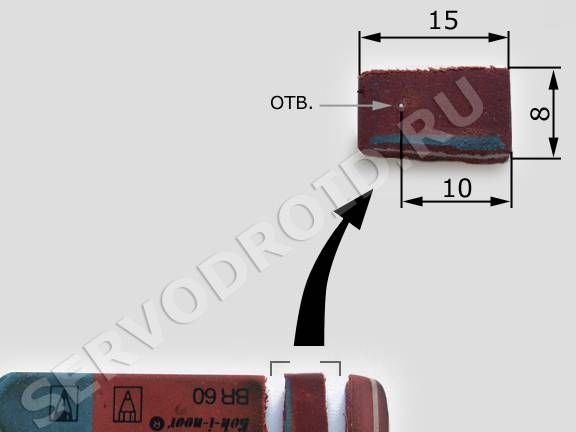
A rezgés eléréséhez excentrikus, azaz kiegyensúlyozatlan tárgyat kell a motor tengelyére helyezni. A szerző a radír excentrikus elemét megfelelő méretű darab levágásával készítette. Készítsen lyukat a fehér nyíl által jelzett helyre. Nem szabad nagynak lennie, mivel az excentrikus elcsúszik a motor tengelyéről. Tűvel is elkészíthető.
Negyedik lépés Védőburkolat készítése.
Mivel a robot működéséhez a forgó radír hozza létre a rezgést, tanácsos ezt a helyet különféle tárgyaktól megvédeni. Ezenkívül az ilyen védelem érdekesebb megjelenést kölcsönöz a robotnak. A védőburkolat papírból készül, amely több rétegből áll. Készítsen hengert papírból, annak mérete a motor méretétől függ. Annak érdekében, hogy a papír nagyobb merevséget nyújtson, ragasztóval elkenhető, ezért alkalmazzon még néhány réteget. Vagy használhat kartont ezekre a célokra.
Egy hengeres alak kialakításához a motort egyszerűen papírral borítják a tetejére.




Ötödik lépés A robot végső összeszerelése
A motort egy meghatározott helyre telepítik, majd egy nejlon esztrichtel rögzítik. Az ilyen esztricheket az építőanyag-értékesítésre szakosodott üzletekben lehet megvásárolni.
Az akkumulátor is pontosan van rögzítve. Fontos szempont, hogy az akkumulátornak egyértelműen középpontban legyen, különben a robot pályája megváltozhat. Mellesleg, így a jövőben meg lehet határozni a mozgás pályáját házi.


Most a klipcsatlakozó és a motor között telepíteni kell egy kis kapcsolót. Összegzésképpen: a klipcsatlakozót az akkumulátorhoz kell csatlakoztatni, és elkezdheti a robot tesztelését. A vezetékeket színnel kötik össze.
Kron akkumulátor használatakor azonban nem szükséges kapcsolót telepíteni, a robotot a csatlakozó csatlakoztatásával kapcsolhatja be.
Nos, a robot második verziója esetén egyszerűen eltávolíthatja az akkumulátort a készülékről, de természetesen a kapcsoló ígéretesebb.
Ez minden, a robot készen áll, elkezdheti a tesztet. A kívánt eredmény elérése érdekében megpróbálhatja megváltoztatni a polaritást, így a motor az ellenkező irányba forog, és a robot másképp viselkedik.