
A BIBOT-1 robot sajátossága, hogy két feladatot képes végrehajtani. Mozoghat egy fényforrás mögött vagy egy papírra húzható fekete vonal mentén. A robot nagyon rugalmas a beállításokban, vagyis később bármilyen körülményhez testreszabható, vagyis hogy érzékenyebbé tegye a fényt vagy kevésbé. Lehetőség van a motorok fordulatszámának beállítására is, ez lehetővé teszi a robot számára, hogy jobban működjön, különösen a vonal mentén haladva.

A robot eszköze és alapelve:
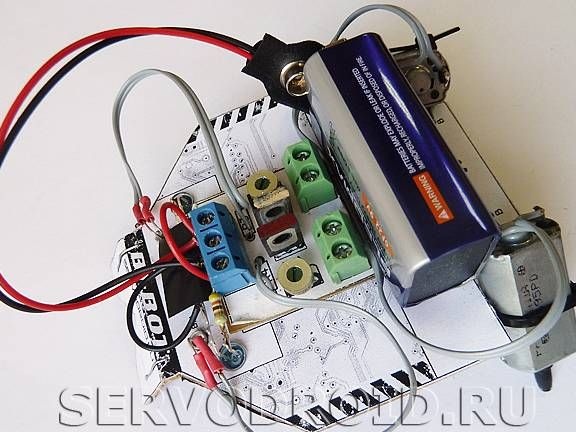
A robot alapja kartonból készül, a sablont kinyomtatják a nyomtatóra, majd összeomlik. Ami a rádióelemek modulját illeti, egy textolitot vettünk alapul, a modult a robot alapjához erősítettük. A test merevítéséhez speciális bordákat használnak a kialakításhoz.
A motorokat a legtöbb ilyenhez hasonlóan telepítik DIY, vagyis egy szögben. Emiatt nincs szükség a kerekek és a sebességváltó felszerelésére. Annak megakadályozása érdekében, hogy a tengelyek megcsússzanak a felületen, védőeszközöket helyeznek rájuk.
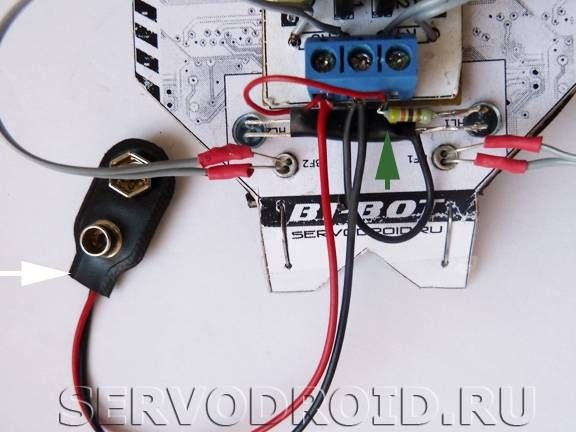
Áramforrásként 9 V típusú 6F22 akkumulátort használnak. Az akkumulátor szalaggal van rögzítve és mindig elérhető az egyszerű cseréhez.
Ami a kapcsolót illeti, akkor autók úgy döntött, hogy elkerüli a telepítést. A robot be- és kikapcsol, ha manipulálja az akkumulátorhoz rögzített kapcsot.
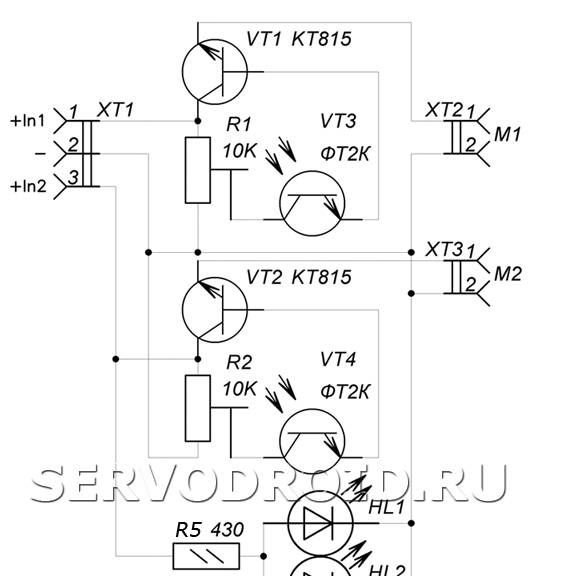
És végül, a robot beállítása. A robot érzékenységének beállításához a rendszernek két beállító ellenállása van. Amikor forognak, beállíthatja a robot fényérzékenységét, és beállíthatja a motorok forgási sebességét is. Minél érzékenyebb a robot a fényre, annál gyorsabban mozog, és fordítva.
Ami a működés elvét illeti, mindent a diagram tartalmaz.
Anyagok és eszközök:
- 9 V-os elem és bilincs a csatlakoztatáshoz;
- két csatlakozó a motorok csatlakoztatásához (két szakaszos sorkapocs);
- motorok;
- nejlon esztrich;
- védő (gumihenger);
- két fototranzisztor;
- két infravörös LED;
- tartó a tűzőből;
- három szakaszos sorkapocs az áramellátás csatlakoztatásához;
- hangoló ellenállás.

Gyártási folyamat:
Első lépés. NYÁK-tervezés
A díjat LUT módszerrel hozzák létre. A munka megkezdése előtt az üvegszál felületét alaposan meg kell tisztítani, majd meg kell mosni és alaposan szárítani. A gyártás után a vezetőképeket multiméterrel ellenőrizni kell, hogy nincs-e rövidzárlat.
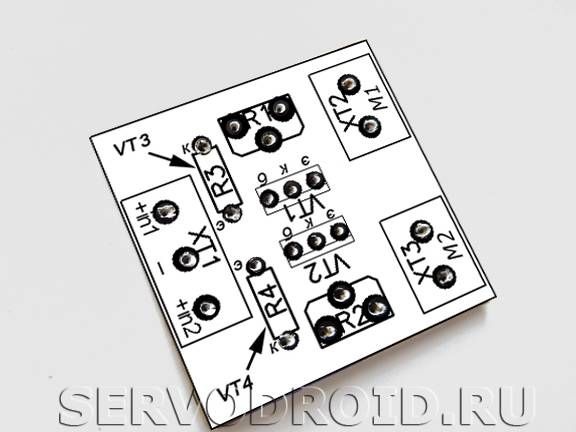
Második lépés telepítés elektronikus elem
Ezután el kell készítenie egy papírra nyomtatott rajzot, és ragasztania azt a létrehozott táblára. Ebben az esetben a papíron és a NYÁK-ban lévő lyukaknak pontosan egyezniük kell. Ezután a rádió alkatrészeket az ábrán látható módon telepítik. A munka során az R3, R4 ellenállások telepítéséhez a VT3, VT4 fototranzisztorokat kell telepíteni.
A három szakaszból álló XT1 sorkapocs szélső részeit rögzítőhuzallal kell összekötni. Az érintkezők csatlakozási pontjait jól szigetelni kell, erre a célra legjobb a hőre zsugorodó csövet használni.
Harmadik lépés Hogyan lehet egy esetet létrehozni?
A test rajzát nyomtatni kell egy normál A4-es papírlapra. Ezután el kell vennie egy darab hullámkartonot, és rá kell rajzolnia egy rajzot, ezt követően az ügyet a kerület körül kell vágni.
Ahol az "olló" piktogram vastag vonal mentén helyezkedik el, vágásokat kell végezni. Ezt követően a fekete pontozott vonal mentén meg kell hajlítania a kartont, mint a képen, és fel kell helyeznie a fekete nyilakat.



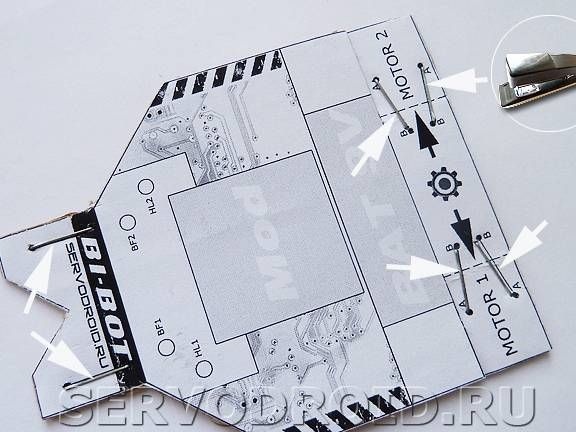


A ház elöl és hátulján a tűzőgép segítségével a megadott helyzetbe kell felszerelni a konzolokat. Telepítésük helyét fekete körök jelölik, körökkel. Tűzőkapcsok szükségesek a keret merevítéséhez. A konzolok felszerelése után unalmas a hajtogatási vonalak mentén hajlítani.
A BF1, BF2 jelöléssel ellátott helyeken furatokat kell készíteni a fototranzisztorok beszereléséhez. A HL1, HL2 helyeken olyan méretű lyukakat kell készíteni, amelyek illeszkednek az infravörös LED-ek burkolatának átmérőjéhez.
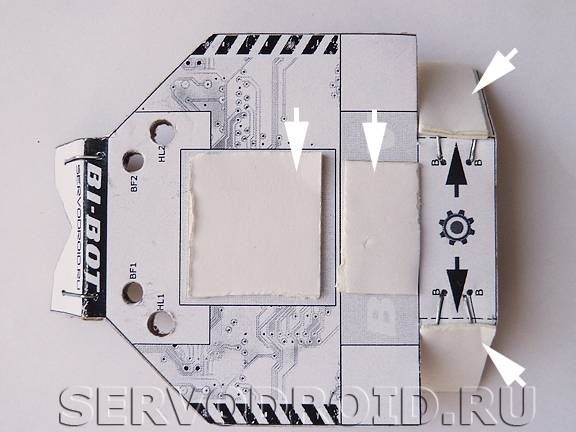
A Mod ", a" BAT 9V "és a" MOTOR 1 "," MOTOR 2 "jelöléssel ellátott helyeken ragassza fel a kétoldalas szalag szalagjait.
Negyedik lépés Motorok beszerelése
A motorokat nylon rögzítőelemekkel kell felszerelni. A tengelyek csúszásának elkerülése érdekében védőeszközökkel kell őket viselni. Gumiszalagokból készülnek, amelyek a toll héliumrúdjában vannak. Ugyanebben a lépésben forrasztja be a vezetékeket a motorokhoz.


Ötödik lépés Infravörös LED-ek telepítése
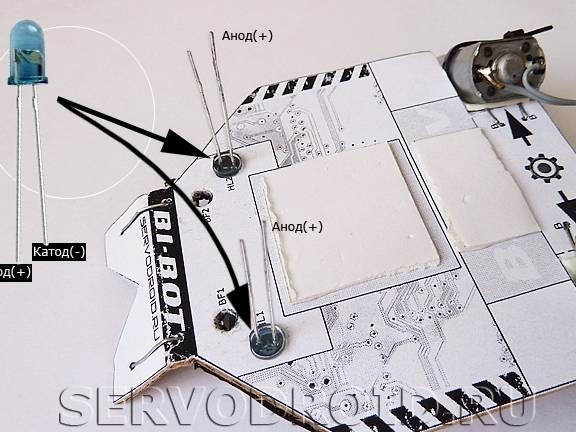
Infravörös LED-ek telepítésekor fontos, hogy ne zavarják következtetéseiket, az importált elemeknél az anód hosszú érintkező, azaz egy plusz. A LED-eket a képen látható módon a HL1, HL2 helyekre telepítik. Az eredményeket úgy hajlítják meg, hogy a diódák párhuzamosan csatlakoztathatók legyenek.
A LED-ek pozitív érintkezőjéhez 430 ohmos ellenállást kell forrasztani, a negatív érintkezőhöz pedig fekete vezetéket.
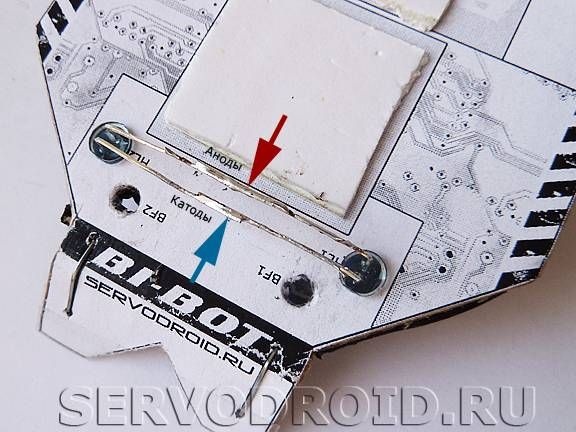
A fekete vezeték másik végét csatlakoztatni kell a három szakaszos sorkapocs középső érintkezőjéhez. Ami az ellenállás kimenetét illeti, a sorkapocs csatlakozójához kell csatlakoztatni.
Hatodik lépés Az utolsó építkezési szakasz
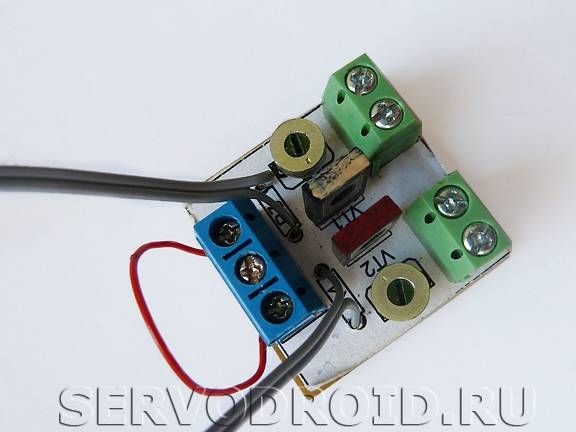
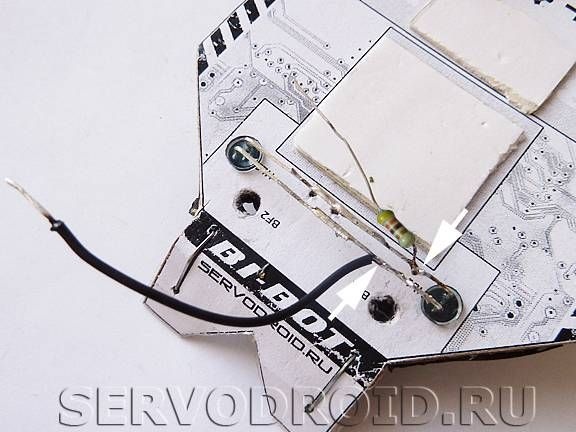
Annak érdekében, hogy a robot a vonal mentén mozogjon, a fototranzisztorokat a BF1, BF2 helyre kell helyezni, mint a képen.
A fényforrás mögött történő mozgatásra szolgáló tranzisztorok hátulján vannak elhelyezve.
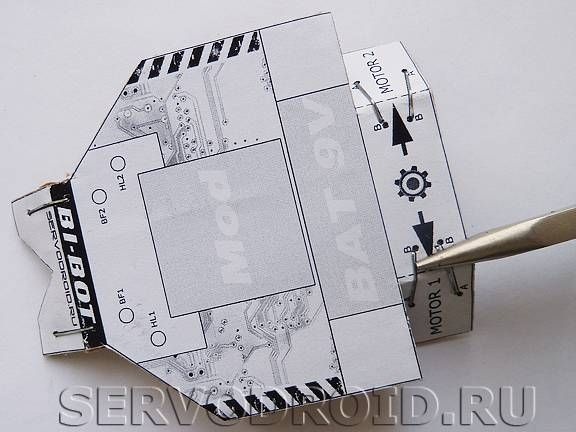
Összefoglalva: a motorokat összekapcsolják és az akkumulátort behelyezik.


Ez minden, a robot készen áll. Most megpróbálhatja engedélyezni és konfigurálni a szükséges feltételekkel.