Másnap péntek este a szerző valami érdekeset szeretett volna összegyűjteni. Emlékezve arra, hogy látta a robotok rajzolásának projektjeit, és folyamatos forgásszervével rendelkezik, úgy döntött, hogy ilyen robotot összeállít. A folyamatos fordulatszámú szervó közönségesből is elkészíthető.
anyagok:
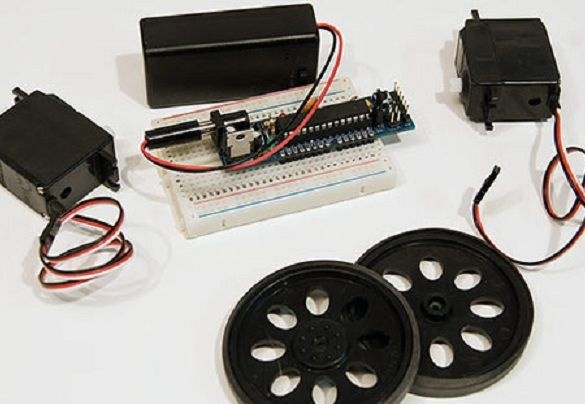
- DC Boarduino (ez egy klón Arduino)
- Szervo folyamatos forgás 2 darab
- Szervo kerekek 2 db
- kenyérvágódeszka
- 9 V-os akkumulátor-csatlakozó 2,1 mm-es dugasszal és kapcsolóval
- összekötő vezetékek
Nem szükséges a Boarduino-t használni ebben a projektben, elég az Arduino táblák. A szerző ezt a táblát mérete miatt választotta meg. Szüksége lesz egy bizonyos számú markerre is, különféle színű készletet vásárolhat ehhez a robothoz.
Ezen felül szüksége van egy 9 V-os akkumulátorra és az alapra a rajzrobot testéhez.
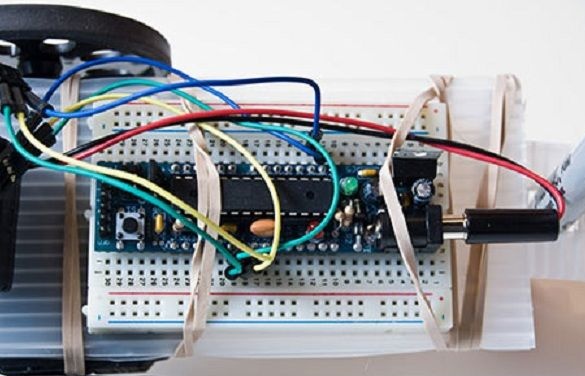
A robot összeszerelésében nincs semmi bonyolult. Mindenekelőtt a szerző két szervóval ragasztószalaggal rögzíti a kerekeket, és megmérte a kerekek közötti távolságot. Szükséges, hogy az alap szélessége valamivel kisebb legyen, mint a kerekek közötti távolság. A szerző hullámosított műanyagot használ, mivel ez elég könnyű és tartós, és ezzel nem nehéz dolgozni. Használata természetesen nem elengedhetetlen, akár kartonot vagy műanyagot is használhat a lemeztárcák számára.
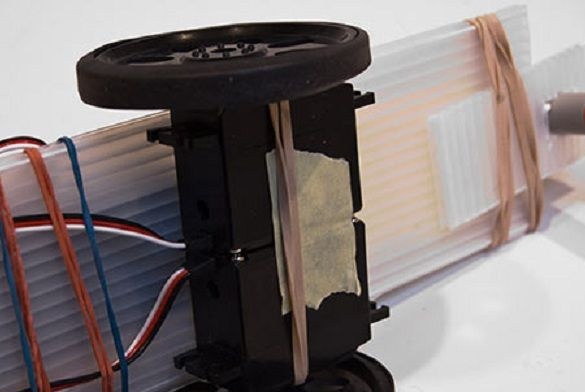
A szervóhajtásokat gumiszalagokkal csatlakoztatták az alaphoz. Az akkumulátor és a kenyérlemez elhelyezésekor nehézségek merültek fel, mivel fenn kellett tartani az egyensúlyt. A szerző több helyet akart tenni azon az oldalon, amelyen a jelölőt helyezte, de nem akarta előnyt élni az ellenkező oldalon. Gumi szalagok segítségével meglehetősen egyszerű az alkatrészek helyzetének beállítása, meghatározva az optimálisat.
A projekt során BLS tüskékkel ellátott vezetékeket használnak a kenyérvágólaphoz való csatlakoztatáshoz, szervómeghajtók is csatlakoztatva vannak hozzájuk.
Amikor a szerző befejezte a robot összeszerelésével kapcsolatos munkát, azonnal meg akarta ellenőrizni annak teljesítményét. Időbe telt a kód keresése. Elbotlva egy cikkre, amely Arduino használatával szabályozza a Parallax folyamatos forgású szervóját, rájött, hogy jó úton halad. A kódot a lehető legnagyobb mértékben egyszerűsítették, a Drawbot jelenleg csak körökben mozoghat.Természetesen ez primitív, de egyben nagyszerű kiindulópont és a fejlesztés és a modernizáció alapja. A kód letölthető a cikk alatt.
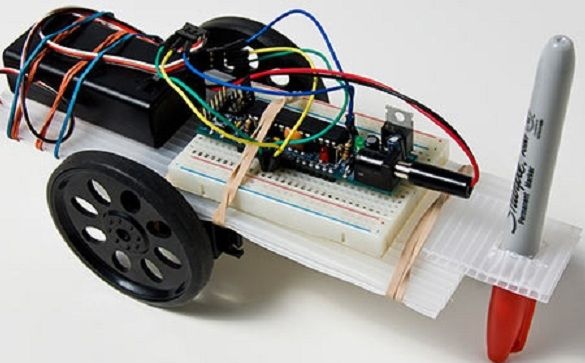
Most a szerző kapott egy robotot, amely körben halad. A munkát folytatva a szerző hullámosított műanyag maradványokat vont be és kés segítségével egy lyukat készített benne. A lyukat a szükségesnél kissé kisebb átmérővel vágtuk, a csökkentett lyuknak köszönhetően a benne lévő marker tökéletesen rögzült. Ha kartonpapírt használ, akkor ez a hatás nem lesz, és a marker nem fog jól megtartani vagy esni.

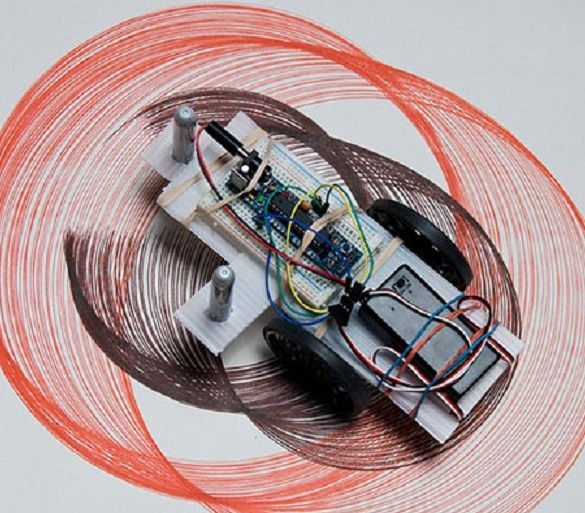
A jelölő telepítése után ideje kipróbálni a robotot. Azzal, hogy a 24x18 lap közepére állította és bekapcsolta, a szerző végül látta, hogy Drawbot működik. Pontolni kezdte a köröket. Azt mondhatjuk, hogy a szerzőnek sikerült létrehoznia egy robotot, amely egyfajta műalkotást hoz létre.
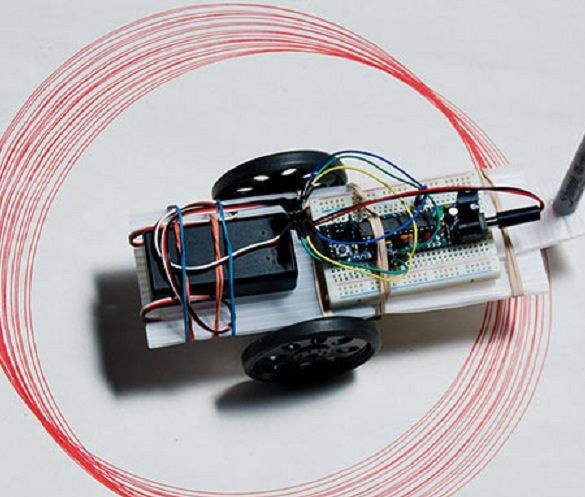
A kép kissé kínos lett a padlón fekvő lap miatt, és nem volt egészen egyenletes, és valószínűleg a szervók nem forogtak szinkronban. Kiderült, hogy az egyik kör alacsonyabb lehet, a második magasabb, a másik pedig kissé magasabb vagy alacsonyabb. Valószínűleg egy ideális helyen az összes kör egy vonalban lenne igazítva. Úgy néz ki, szebb.
A szerző úgy gondolta, hogy a második marker felvilágosíthatja a helyzetet, és a robot még érdekesebb képeket készít. Az eredmény jó volt, a körök kereszteződtek egymással. Érdekesebb lesz látni, hogyan viselkedik a Drawbot egy nagy papírlapon.
Ha a robotot egy papír felületre engedi, a szerző kaphat egy kört vagy egy kört. De ha van kész robotja, akkor már gondolkodhat a kód megváltoztatásával, hogy továbbfejleszti.