

A cikk egy legendás "Canbot" robot létrehozásának példáját vizsgálja meg. A robot részletek nagy részét 3D nyomtatóra nyomtatják. A robot távolról vezérelhető.
Anyagok és eszközök házi:
- Egy Atmel Attiny85 mikrovezérlő;
- két mikroszolgáltatás HXT900 vagy azok analógjai;
- egy 3,7 V LiPo akkumulátor;
- egy infravörös vevő 38 kHz-en;
- HC-SR04 típusú ultrahangos átalakító;
- 9x4mm-es kapcsoló vagy jumper;
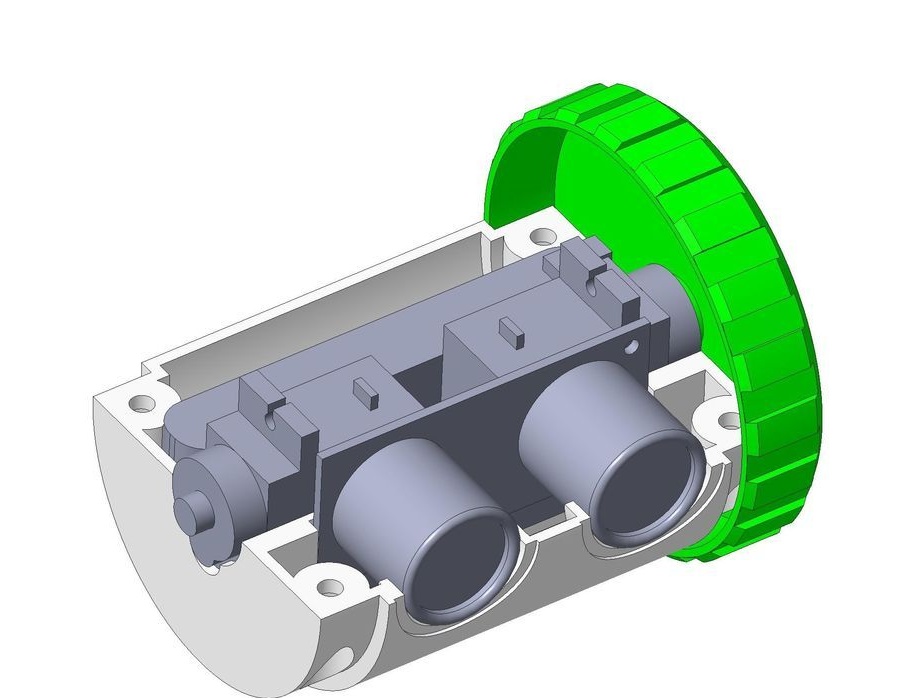
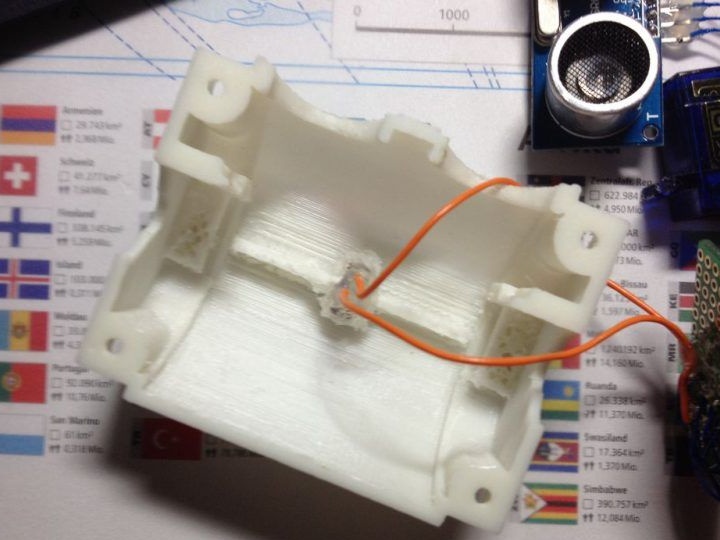
- 3D alkatrészek (lehetséges). Ehhez egy tető (top.stl), egy alsó (bottom.stl) és két kerék (wheel.stl) szükséges.
Természetesen forrasztószerszámokhoz, forró ragasztóhoz, csavarhúzókhoz, csavarokhoz, huzalokhoz és egyéb apró dolgokhoz is szükség lesz.

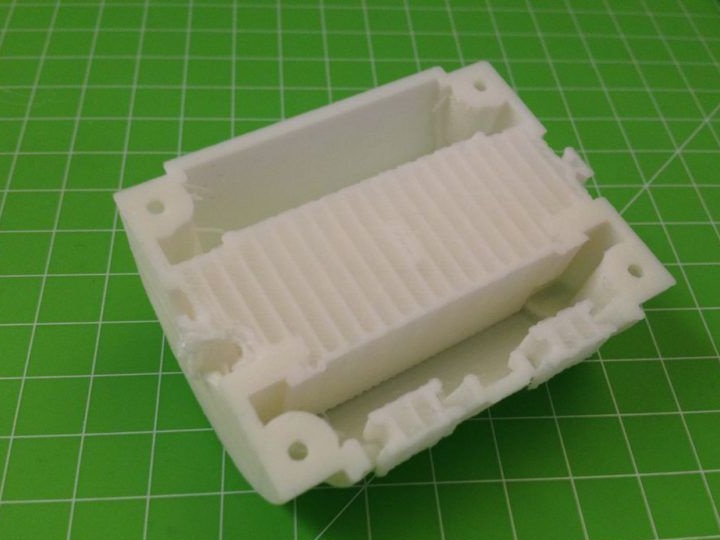
A felső és alsó részeket síkkal lefelé kell nyomtatni a „tartószerkezetek” opció használatával. Attól függően, hogy milyen típusú nyomtatót használt, a kész alkatrészeket a végén meg kell tisztítani.
A robot gyártási folyamata:
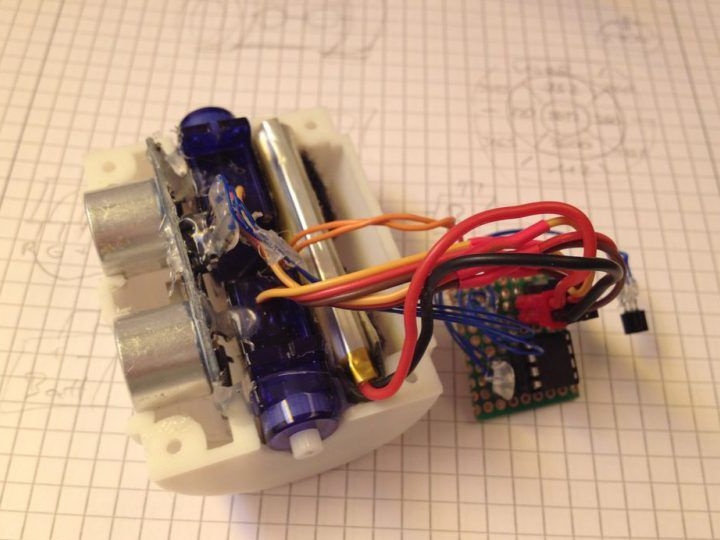
Első lépés. elektronikus a robot része
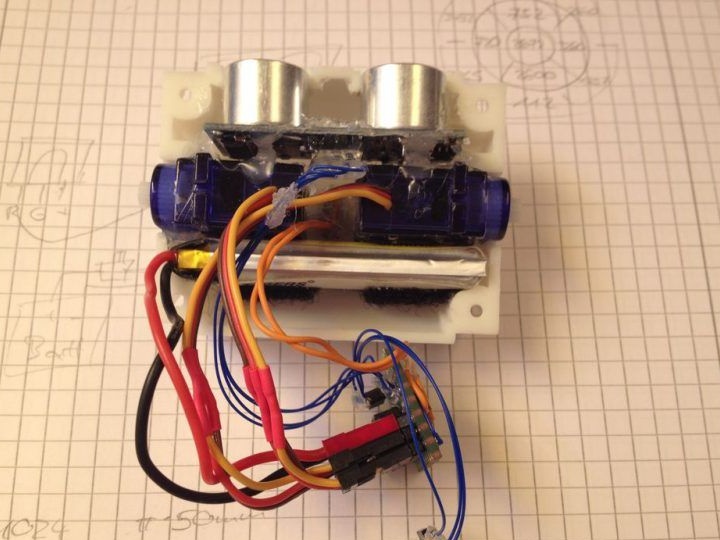
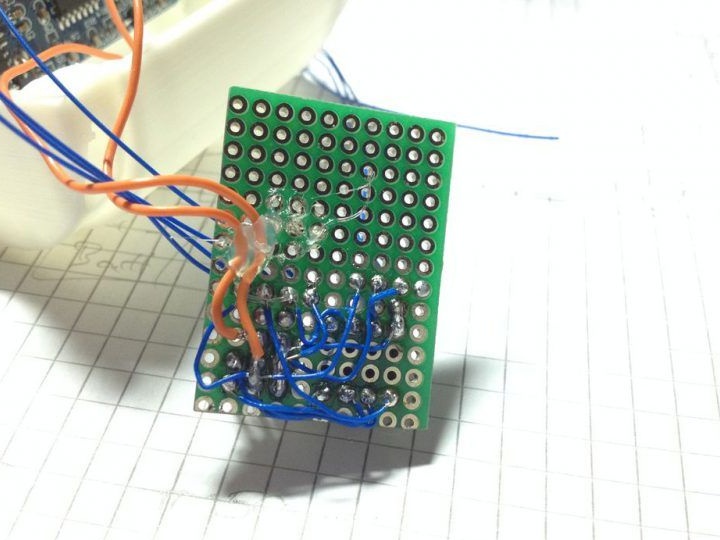
Először be kell állítania a szervókat, azokat folyamatos forgássá kell konvertálni. Hogyan lehet ezt megtenni, rengeteg utasítás van az interneten. Nos, akkor az összes elektronikus elemet össze kell szerelni az ábrán látható módon. Kényelmes volt az elektronikus alkatrész összeszerelése, hogy vegyen egy apró darab kenyeret, valamint vékony huzalokat is.


Második lépés A robot szoftver része
Ha a legmagasabb szintű professzionális robot létrehozásával jár, akkor a szoftver rész önállóan írható. De ehhez meg kell tanulnia a programozási nyelvet. Egy egyszerűbb változatban letöltheti a kész kódot, és egyszerűen feltöltheti azt a mikrovezérlőbe.
A szerző szerint a legjobb a robot infravörös jeleket vesz a Sony márka távirányítóitól. A jövőben a kódrészt „újra kell villanni” Arduino és az adatokat a Serial.print () függvényen adja ki. Ennek eredményeként meg lehet tudni, hogy az egyes gombok milyen kódolással vannak ellátva.
Harmadik lépés Az utolsó szakasz. Szerelje össze a robotot
Nos, összefoglalva: a robot megy. Ehhez forró ragasztóra van szüksége. Ezzel rögzítenie kell a vezetékeket, hogy azok ne kerüljenek le, amikor a robot mozog.Ezenkívül meg kell erősíteni a kapcsolót és az ultrahangos érzékelőt is. Összegezve, a robot burkolata négy csavarral van összekötve, így szükség esetén könnyen leszerelhető. Mellesleg, a szervóhoz csavarok tökéletesen felszerelhetők.

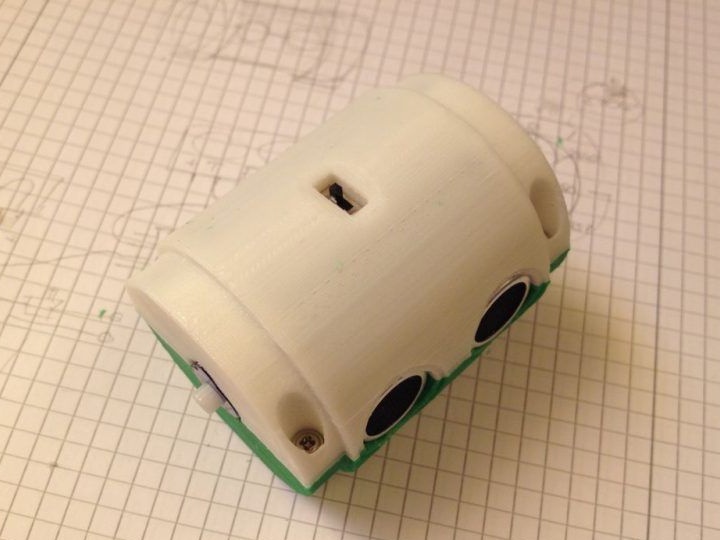
Ez minden, most a robot szinte készen áll. A kerekek felszerelése a szervomotor tengelyekre marad, és elkezdheti a robot tesztelését. A videón részletesebben láthatja, hogy a házi készítés hogyan működik.