


Jó napot, ma meg akarom osztani az utasításokat a tartály készítéséről. A belső vezérlőnek két lehetősége van: ESP -8266 és Arduino Pro Mini. Az első verzióban a vezérlés Wi-Fi kommunikáción keresztül történik. A másodikban - IR távirányító. A TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35) alapján készült, egy Tamiya 70097 ikermotoros sebességváltó-készlet és a sebességváltóval szállított motorok hajtják.
Szükségünk lesz:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- modellragasztó (például a TAMIYA cement)
- Tamiya 70097 kétmotoros sebességváltó készlet
- ESP 8266 -12E vagy Arduino Pro Mini 8MHz 3,3 V
- AMS 1117 feszültségstabilizátor 3,3v 8000mA (ha opcionális az ESP 8266-12E esetén)
- Qifei L9110 motorvezető
- 10v kondenzátor 1000uF
- kétszínű (piros, zöld) LED
- kék LED
- 2 piros LED
- IR vevő
- fotorezisztor
- 2 rekesz 2 AAA elemhez vagy 4 AAA 1,2 V 1000mA NI-MN elemhez
- 2 ellenállás 2ohm
- 4 ellenállás 75 ohm
- 6 ellenállás 10 kOhm (ha opcionális az ESP 8266-12E esetén)
- gomb
- fotorezisztor
- USB - TTL
- forrasztópáka
- többszínű vezetékek
1. lépés Ház és mechanika.
Először be kell gyűjtenie a modell TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Az alsó részt az utasítások szerint ragasztjuk, kivéve azokat az alkatrészeket, amelyek lefedik a sebességváltó tengelyének kimeneti nyílásait. A vezető csillagok sem tapadnak. Ragasztja a felső részt az utasításoknak megfelelően, változtatás nélkül. Mindezt ragasztva hagyja megszáradni és folytassa a sebességváltó gyűjtésével. Amint az az utasításokból kitűnik, a Tamiya 70097 két különböző változatban szerelhető össze.
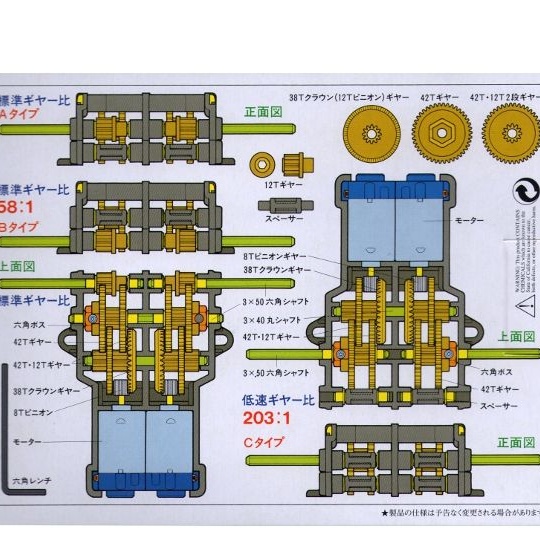
Az első opció 58: 1 sebességváltóval, a második - 203: 1. Az első lehetőségre van szükségünk. És itt is nem olyan egyszerű. Ebben az esetben a tengely kimenete lehet közelebb a sebességváltó aljához vagy középen. A tengelyeket ki kell szabadítani a középső lyukba! A sebességváltó összeszerelése után folytatjuk a modellre történő telepítést. Elméletben mindennek egyszerűnek kell lennie, mert egy cég modellje és sebességváltója egyaránt szerepel. A gyakorlatban - a sebességváltót oda kellett tolni. A sebességváltó vízszintes helyzetében a hajtókerekek tengelyei felfelé dőltek, tehát fémlemezt kellett vágni, amely lehetővé tette a sebességváltó rögzítését a kívánt helyzetbe.

A sebességváltó tengelyeit 3 mm-rel le kell vágni. Ezután ragasztja rá a meghajtókerekeket.

A hátsó részhez közeli felső részben lyukakat készítünk egy kétszínű LED-hez és egy IR vevőhöz.

Az elejére egy lyuk van egy kék LED-hez, amely zseblámpaként szolgál majd.

És a nyílás belsejében - fotorezisztorhoz.

A hátoldalon ragassza fel a piros LED-eket a megvilágításhoz.

A fentiek alapján meg kell forrasztani a vezetékeket. Kényelmesebb ezt a telepítés előtt megtenni.
2. lépés Villanyszerelő
Itt válogatom a további összeszerelés lehetőségeit.
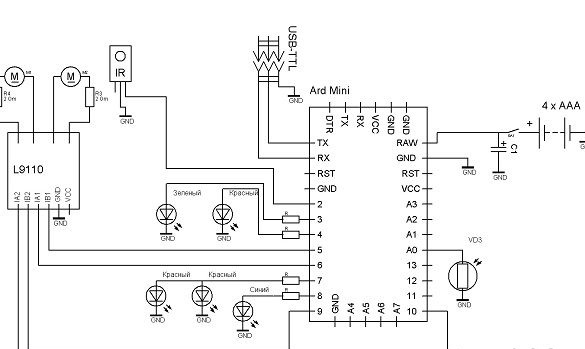
Ha az ESP 8266-ot választotta, a beépített Wi-Fi modul jelentősen megkönnyíti a vezérlés és a csatlakozás folyamatát.Könnyen programozható az Arduino IDE-be. A legjobb, ha egy 4 MB memóriájú modult választunk. Ebben az esetben össze kell gyűjteni a minimális kábelköteget az ESP-8266 indításához és villogásához. Csak a VCC tüske van közvetlenül csatlakoztatva a tápegységhez, a fennmaradó csapokat: CH_PD, RESET, GPIO0, GPIO2, ellenálláson keresztül kell húzni a tápegységhez (VCC). A 10kOm-os ellenállások cserélhetők másokkal, 4,7KOm-től 50KOm-ig, kivéve a GPIO15-t - ennek az értéknek legfeljebb 10k lehet. Közvetlenül a tápegység mínuszához (GND) csak a GND-t csatlakoztatjuk, és a GPIOO-t az ellenálláson keresztül 10KOm-ra húzzuk, hogy a modult firmware-letöltési módba tegyük, a GND-hez. A gombra van szükség a modul újraindításához és villogásához. USB-TTL csatlakozó - firmware-hez.
Itt egy ábra
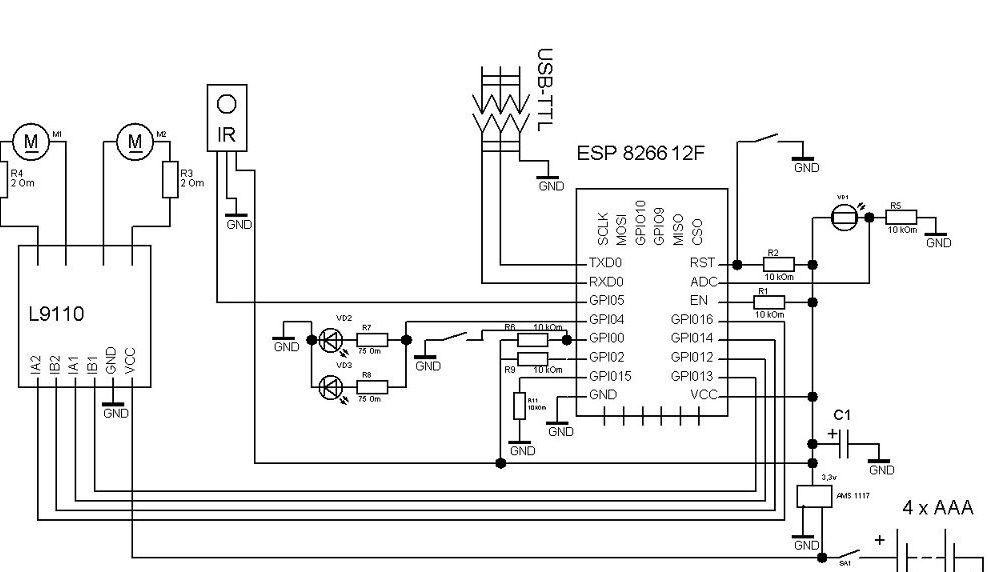
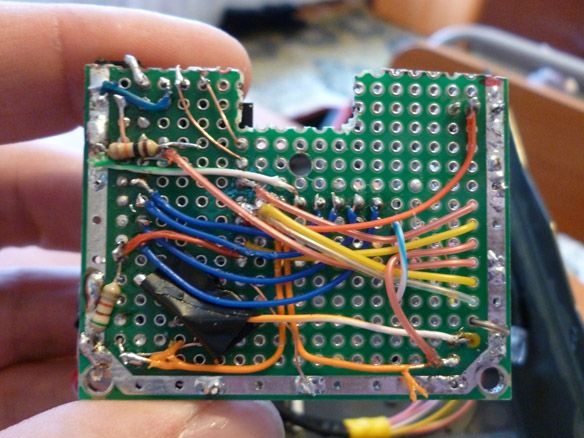
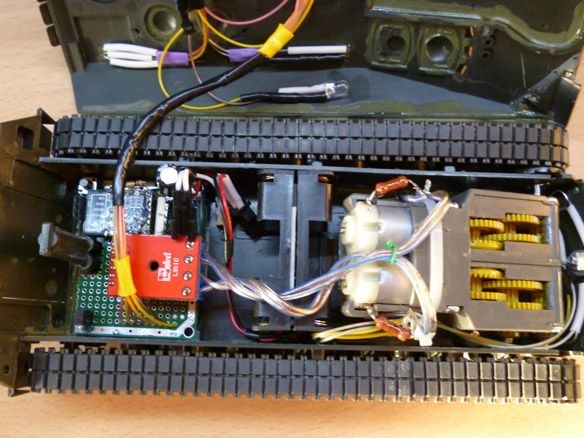
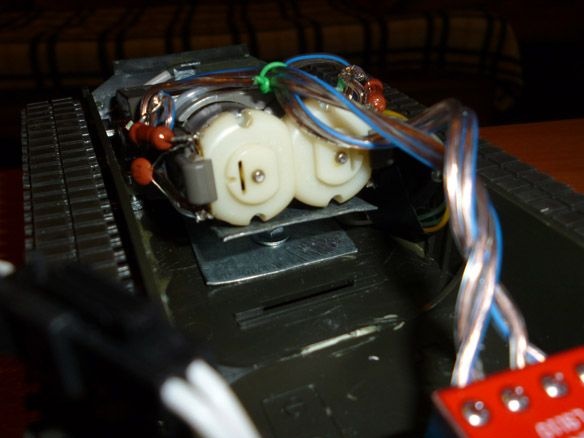
Magyarázok egy kicsit, a kék és két piros LED-re szükség van a háttérvilágításhoz (sötétben jól látható és szép), a fotorezisztor csatlakoztatva van a vezérlő ADC-jéhez, és a megvilágítás meghatározásához szükséges (amikor a háttérvilágítás sötétté válik). 10 kOhm húzó ellenállások, 75 Ohm LED-ek számára, 2 Ohm áramkorlátozók motorokhoz (nélkülük, amikor mozgatni próbálnak, a vezérlő túlterhelt). Mindent forrasztunk az áramköri áramkör szerint. Az áramellátáshoz 4 "kis" vagy négy AAA méretű elemet használhat, sorba forrasztva. Ragasztjuk két elem két rekeszét kétoldalas szalaggal, és sorosan csatlakoztatjuk. Mind az elemtartó rekeszek, mind az akkumulátorok a sebességváltó és az áramköri lap között vannak elhelyezve.

Ha a választása az Arduinóra esik. Csak az Arduino Pro MINI illeszkedik belsejébe. Érdemes egy 3,3 voltos fórumot választani, mivel a motorokat 3 voltos teljesítményre tervezték, és nem akarja külön-külön táplálni a motorokat és az Arduino-t. Arduino könnyebb. A teljes vezérlőheveder és a feszültségszabályozó már a táblán található. Az Arduino aljzat és a motor meghajtójának kioldása marad az áramköri táblán.

3. lépés: A programozási környezet előkészítése.
A firmware szerkesztéséhez és a vázlat ESP-ben való kitöltéséhez telepítenie kell az Arduino IDE-t az Arduino.cc hivatalos oldaláról, és telepítenie kell az ESP-kiegészítőt a Boards Manager segítségével. Ehhez indítsa el az Arduino IDE-t, majd a Fájl - Beállítások - mezőben a További táblák kezelő URL-címe mezőbe írja be a linket.
http://arduino.esp8266.com/package_esp8266com_index.jsonkattintson az OK gombra (e mezőbe több, vesszővel elválasztott linket is megadhat). Következő eszközök - Fórum - Táblák kezelő, írja be az esp8266-ot a szűrőmezőbe, majd kattintson az ESP8266-ra az ESP8266 közösségi fórumon. Kattintson a Telepítés elemre, és várja meg, amíg a letöltés befejeződik. Most már ki kell választani a Board - Generic ESP8266 eszközt az Eszközök menüben, és beállítani a modul frekvenciáját 80 vagy 160Mhz-re, a flash memória méretét, és ki kell választania a soros portot, amelyhez az USB-TTL adapter csatlakozik.
Arduino esetén csak telepítse az Arduino IDE-t az Arduino.cc hivatalos weboldalról.
4. lépés Firmware
A vázlat szerkesztése és ESP-vel való kitöltése fennmarad.
A "String _ssid =" "mezőben" az idézőjelek között jelölje meg, melyik hozzáférési ponthoz szeretne csatlakozni.
"String _password =" ";" a hálózat jelszava.
"String _ssidAP =" Mardella ";" annak a hálózatnak a neve, amelyet az ESP felvesz, ha nem csatlakozik a meglévőhöz.
"String _passwordAP =" 12345678 ";" - annak a hálózatnak a jelszava, amelyet az ESP felvesz, ha nem csatlakozik a meglévőhöz.
"String SSDP_Name =" Mardella ";" SSDP név
Az indítás után az ESP megpróbál csatlakozni a vázlatban megadott hozzáférési ponthoz, ha sikerrel jár, akkor meg kell határoznia robotunk IP-címét, és ehhez egy böngészőn kell csatlakoznia. A számítógépen keresztül is átléphet a hálózati infrastruktúrába, megtalálhatja ott tartályunkat, és duplán kattintva csatlakozhat hozzá. Ha a kapcsolat meghiúsul, az ESP lesz a hozzáférési pont. Ezután hozzáférést lehet elérni, ha csatlakoztat egy új hozzáférési ponthoz, és beírja a 192.168.1.1-et a böngészőbe.
A webes felület két oldalból áll. Az első, aki irányította. A második a testreszabás. A második oldalon megadhatja azt a hozzáférési pontot, amelyhez csatlakozni kíván, valamint a tartály nevét és annak a hozzáférési pontnak a nevét és jelszavát, amelyet az ESP felvesz. Az összes módosítás újraindítás után lép hatályba. A modult a webes felületen keresztül is újraindíthatja.
Arduino esetén szerkesztenie kell az összes „results.value” mezőt. Miután leírta a konzol IR kódjait, amelyeket ott használni fog.

Video tanchika: